В даний час двигуни постійного струмузнайшли широке застосуванняу різних галузях промисловості. Двигуни постійного струму використовуються там, де потрібне плавне і точне регулювання швидкості та крутного моменту в широких межах. У цій статті я розповім про створення блоку керування для двигуна постійного струму, який дозволяв би змінювати частоту обертання валу двигуна та стабілізував обороти на певному рівні, незалежно від навантаження на вал двигуна.
В основі розробки покладено принцип роботи приводу, що слідкує, з одноконтурною системою регулювання.
Блок управління складається з наступних вузлів:
- СІФУ (Система Імпульсно - Фазового Управління)
- Регулятор
- Захист
Принципова схема приводу наведена нижче.
Більше
Розглянемо схему детальніше.
Отже, СІФУ (Система Імпульсно – Фазового Управління) – перетворює синусоїдальну напругу мережі на серію прямокутних імпульсів, що йдуть на керуючі електроди силових тиристорів. При включенні блоку керування змінна напругавеличиною 14-16в надходить на бруківку випрямляч D1, де перетворюється на пульсуючу напругу, що служить не тільки для живлення схеми, але і для синхронізації роботи приводу. Діод D2 перешкоджає згладжуванню імпульсів конденсатором С1. Далі імпульси надходять на детектор нуля - DA1.1, зібраного на одному ОУ мікросхеми LM324, що працює в режимі компаратора. Поки немає імпульсу, напруги на прямому та інверсному входах приблизно рівні та компаратор перебувати у збалансованому стані. При проходженні фази через «0», на інверсному вході компаратора DA1.1, що грає роль «детектора нуля» з'являються імпульси, що перемикають компаратор, в результаті чого на виході DA1.1 виробляються прямокутні синхроімпульси, період проходження яких жорстко прив'язаний до походження фази через «0» ».
Нижче наведені осцилограми, що пояснюють принцип роботи. 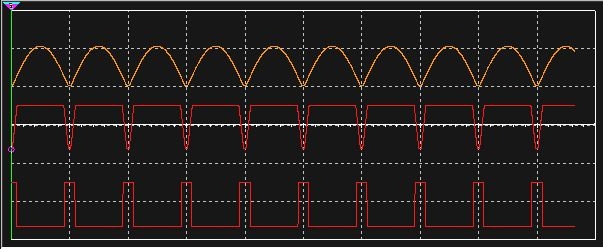
Зверху донизу: КТ1, КТ2, КТ3.
Схема була просимульована в програмі Multisim 11. Ось файл проекту. Можна скачати, запустити та подивитися як працює даний вузол.
Далі синхроімпульси надходять на інтегратор з транзисторним ключем (С4, Q1), де виробляється пилкоподібна напруга. У момент проходження фази через "0" синхроімпульс відкриває транзистор Q1, який розряджає конденсатор С4. Після спаду імпульсу транзистор закривається і відбувається заряд конденсатора до приходу наступного синхроімпульсу, внаслідок чого колекторі Q1 (осцил. КТ4). формується лінійно наростаюча пилкоподібна напруга, стабілізована генератором стабільного струму виконаного на польовому транзисторі T1. Амплітуда „пили“ рівне 9в виставляється підстроювальним резистором RP1. Напруга „пили“ надходить на прямий вхід компаратора DA1.2.
Напруга завдання надходить на інверсний вхід компаратора DA1.2 і в момент, коли пилкоподібна напруга перевищує величину напруги на інверсному вході компаратора, переключитися компаратор і на виході компаратора формується імпульс (осцил. КТ4). Імпульс диференціюється через ланцюжок R14, C6 і надходить на основу транзистора Q2. Транзистор відкривається і імпульсному трансформаторі Tr1 формуються імпульси відкриття силових тиристорів. Збільшуючи (зменшуючи) напругу завдання, змінюється шпаруватість імпульсів у КТ5.
Ось осцилограми. 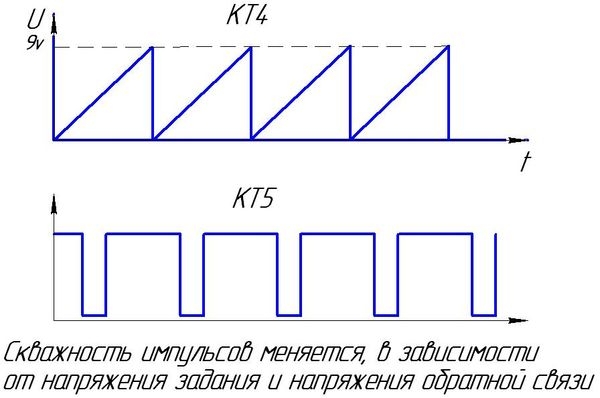
Але ніяких імпульсів у КТ5 ми не побачимо доти, доки не натиснемо кнопку „Пуск“ - S1. Коли кнопка не натиснута, напруга живлення +12в через нормально замкнуті контакти S1 по ланцюжку R12, D3 надходить на інверсний вхід DA1.2 і близько 11в. Так як ця напруга перевищує напругу „пили“ рівне 9в, компаратор замикається, і імпульси, що управляють відкриття тиристорів не формуються. Для запобігання аварії та виходу з ладу двигуна, якщо оператор не вивів на «0» регулятор обертів, у схемі передбачений вузол розгону C5, R13 службовець для плавного розгону двигуна. У режимі «Пуск» схема працює наступним чином: при натисканні кнопки «Пуск» нормально закриті контакти розмикаються і конденсатор С5 по ланцюжку - «земля», R13, - С5 починає плавно заряджатися і напруга на негативній обкладці конденсатора плавно прагнути до нуля. Одночасно, напруга на вході DA1.2, що інвертує, плавно зростає до величини, що визначається напругою завдання, і компаратор починає виробляти керуючі імпульси силових тиристорів. Час заряду визначається номіналами C5, R13. Якщо в процесі роботи двигуна необхідно змінити його обороти, щоб уникнути різких кидків оборотів – у схемі передбачено вузол «розгону – гальмування» R21, C8, R22. При збільшенні (зменшенні) напруги завдання, конденсатор С8 плавно заряджається (розряджається) що запобігає різкому «набросу» напруги на інверсному вході підсилювача і як наслідок запобігає різкому кидку оборотів двигуна.
Тепер розглянемо принцип роботи регулятора оборотів.
Регулятор призначений для підтримки постійних оборотів двигуна в зоні регулювання. Регулятор є диференціальним підсилювачем з підсумовуванням двох напруг: напруги завдання і напруги зворотного зв'язку. Напруга завдання визначається резистором RP1 і надходить через фільтр R20, C8, R21, що виконує одночасно функції вузла «розгону - гальмування», надходить на інверсний вхід регулятора ОУ DA1.3. При збільшенні напруги завдання на виході DA1.3 ОУ лінійно зменшується вихідна напруга.
Вихідна напруга регулятора надходить на інверсний вхід компаратора СІФУ DA1.2 де, підсумовуючись з імпульсами пилкоподібної напруги, перетворюється на серію прямокутних імпульсів тиристорів, що йдуть на керуючі електроди. При збільшенні (зменшенні) напруги завдання збільшується (зменшується) та вихідна напруга на виході силового блоку.
На цьому графіку представлена залежність обертів двигуна від напруги завдання. 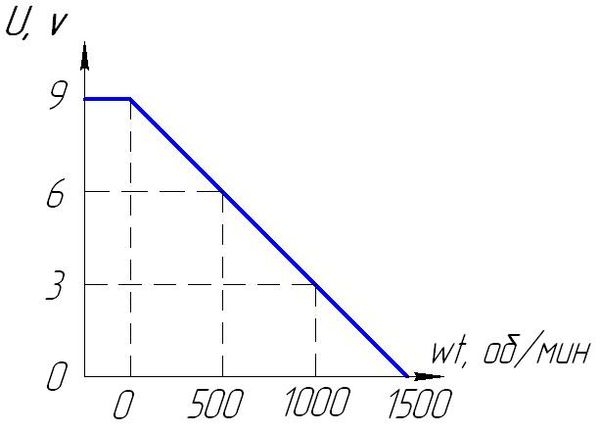
Значення оборотів двигуна дано для прикладу.
Дільник напруги R22, R23, включений на прямий вхід регулятора DA1.3, служить для запобігання аварії двигуна при обриві зворотного зв'язку (при обриві зворотного зв'язку двигун йде в рознесення).
При включенні приводу тахогенератор починає виробляти напругу, пропорційну оборотам двигуна. Ця напруга надходить на вхід прецизійного детектора DA1.4, DA2.1 зібраного за двонапівперіодною схемою. Напруга, що знімається з виходу точного детектора DA1.4, DA2.1, надходить через фільтр C10, R30, R33 на підсилювач, що масштабує зворотного зв'язку DA2.2. Підсилювач служить для припасування напруги зворотного зв'язку надходить з тахогенератора. Напруга з виходу ОУ DA2.2. надходить як у вхід регулятора DA1.3 і на схему захисту DA2.3.
Резистором RP1 задаються оберти двигуна. При роботі двигуна без навантаження, напруга на виході підсилювача, що масштабує, нижче напруги на виведенні 6 ОУ DA1.3. ≈ +5v, тому привід працює як регулятор. При збільшенні навантаження на валу двигуна, зменшується напруга, що отримується з тахогенератора і як наслідок зменшення напруги з виходу, підсилювача, що масштабує.
Коли ця напруга буде меншою за напругу на виведенні 5 ОУ DA1.3 привід входить в зону стабілізації струму. Зменшення напруги на неінвертуючому вході ОУ DA1.3 призводить до зменшення напруги на його виході, оскільки він працює на інвертуючий підсилювач DA1.2, це призводить до більшого куту відкриття тиристорів і, отже, до збільшення напруги на якорі двигуна.
СХЕМА ЗАХИСТУ
Захист від перевищення оборотів призначений для захисту двигуна від аварії у разі різкого перевищення встановлених оборотів двигуна. Схема зібрана на ОП DА2.3, включеного за схемою компаратора. На інверсний вхід компаратора подається опорна напруга дільника R36, R37, RP3. Резистором RP3 встановлюється поріг спрацьовування захисту. Напруга з виходу підсилювача DA2.2, що масштабує, надходить на прямий вхід компаратора захисту DA2.3. При перевищенні оборотів двигуна вище за номінальні, напруга на прямому вході компаратора перевищує поріг уставки захисту, що визначається RP3 - компаратор переключитися. Завдяки наявності у схемі позитивного зворотного зв'язку R38 призводить до «защелкування» компаратора, а наявність діода VD12 перешкоджає скидання компаратора. При спрацьовуванні захисту напруга з виходу компаратора захисту (≈ +11v) через діод VD14 надходить на інверсний вхід 13 DA1.2 СІФУ, а так як напруга захисту перевищує напругу «пилки» (= 9v) - відбувається миттєва заборона видачі імпульсів керуючих на керуючі електроди тиристорів. Напруга з виходу компаратора захисту DA2.3 відкриває транзистор VT4, що призводить до спрацьовування реле Р1.1 і запалювання світлодіода VL1, що сигналізує про аварійну ситуацію. Зняти захист можна тільки повністю знеструмивши привід, і, витримавши паузу 5 - 10 секунд знову включивши його.
Силова частина блоку керування.
Схема силової частини представлена нижче 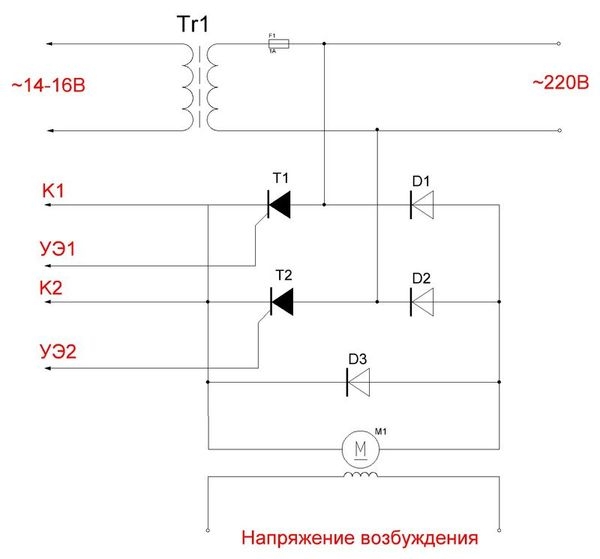
Трансформатор Tr1 призначений для живлення схеми керування. Керований випрямляч зібраний за напівмостовою симетричною схемою і містить два силові діоди D1, D2
і два силових тиристора Т1, Т2 і захисний діод D3. Обмотка збудження живиться від свого окремого трансформатората випрямляча.
Якщо на двигуні відсутній тахогенератор, то зворотний зв'язок для контролю оборотів можна виконати таким чином:
1. Застосувати трансформатор струму, включений у ланцюг живлення керованого випрямляча 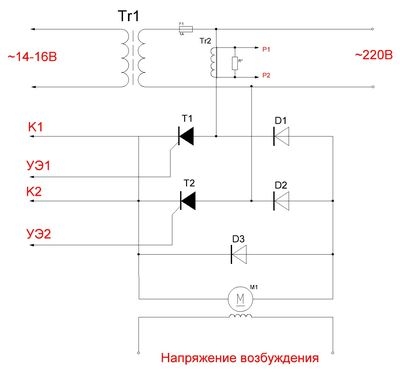
Якщо використовується трансформатор струму, перемичку P1 на схемі блоку управління поставити
в положення 1-3, це необхідно тому, що при збільшенні навантаження струм якоря буде збільшуватися, отже напруга, що знімається з трансформатора струму, теж буде збільшуватися, тому напруга зворотного зв'язку необхідно подавати на інвертуючий
виведення мікросхеми DA1.3. Так само можна поставити стандартний струмовий шунт, але тільки в ланцюг якоря двигуна після випрямляча і знімати сигнал зворотного зв'язку з нього.
2. Використовувати датчик якірної напруги. Схема наведена нижче. 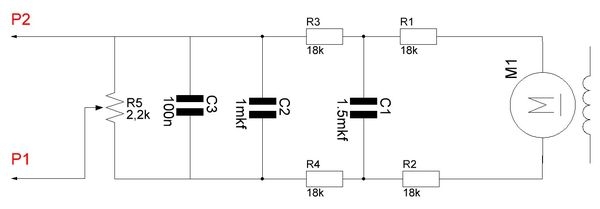
Датчик якірної напруги є фільтр – дільник і підключається безпосередньо до клем якоря електродвигуна. Налаштування приводу здійснюється наступним чином. Резистори "Завдання" та "Масштабування Uoc" виставляються в середнє положення. Резистор R5 датчика якірної напруги виводиться в нижнє до "землі" положення. Включаємо привід та виставляємо напругу на якорі двигуна приблизно 110 вольт. Контролюючи напругу на якорі двигуна, починаємо обертати резистор R5. У певний момент регулювання напруга якорі почне знижуватися, це свідчить у тому, що почав працювати зворотний зв'язок.
Тепер перейдемо до конструкції та налагодження блоку керування.
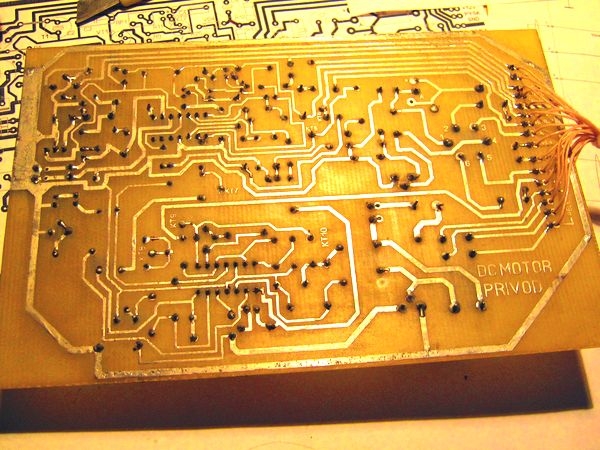
Блок управління було виконано на друкованій платі (файл друкованої плати) 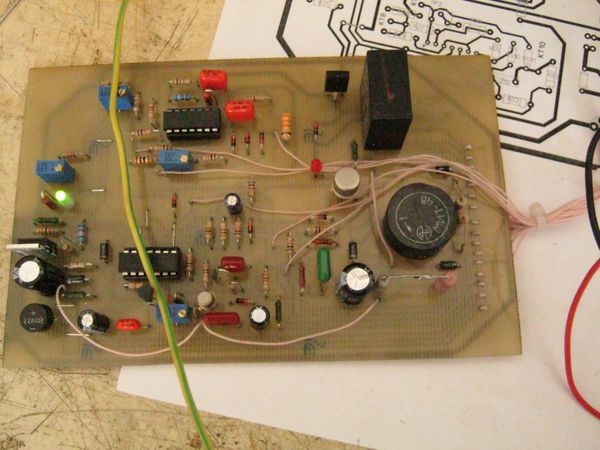
Плата проводом МГТФ з'єднана з роз'ємом для зручності демонтажу при ремонті.
Налаштування
На час налаштування була зібрана силова частина навісним монтажем, як навантаження було використано звичайну лампу розжарювання. 
Налагодження починаємо з перевірки напруги живлення та напруги живлення на операційних підсилювачах DA1, DA2. Мікросхеми бажано ставити у панельки. Потім контролюємо осцилограми у контрольних точках КТ1, КТ2, КТ3 (осцилограми у цих точках наведені на початку опису СІФУ). Тепер осцилограф ставимо в контрольну точку КТ4. Повинні бути пилкоподібні імпульси, як на осиллограмі вище (кнопка «Пуск» у цей момент має бути розімкнена). Підстроювальним резистором RP1 необхідно виставити розмах "пили" рівним 9 вольт, це дуже важливий момент, так як від нього залежить подальша робота схеми. Так як розкид параметрів польових транзисторів буває дуже значний, можливо діапазону регулювання RP1 може не вистачити, тоді підбором номіналу резистора R10 досягти потрібного розмаху. У контрольній точці КТ3 тривалість імпульсу має бути 1.5 - 1.8ms, якщо ні, то підбором резистора R4 (у бік зменшення) досягти необхідної тривалості.
Обертаючи регулятор RR1 у контрольній точці КТ5 проконтролювати зміну шпаруватості імпульсів від максимуму до повного їх зникнення при нижньому положенні двигуна RR1. При цьому повинна змінюватися яскравість лампочки, підключеної до силового блоку.
Далі підключаємо блок управління до двигуна та тахогенератора. Виставляємо регулятором RR1
напруга якорі близько 40-50 вольт. Резистор RP3 має бути встановлений у середнє положення. Контролюючи напругу на якорі двигуна, починаємо обертати резистор RP3. У певний момент регулювання напруга якорі почне знижуватися, це свідчить у тому, що почав працювати зворотний зв'язок. Для бажаючих поекспериментувати: збільшення жорсткості приводу можна також збільшити опір R24, збільшивши цим коефіцієнт посилення регулятора чи збільшити резистор R32.
Якщо використовується зворотний зв'язок струму якоря двигуна.
Для цього, як говорилося вище, необхідний трансформатор струму, включений до ланцюга живлення
керованого випрямляча. Схема калібрування трансформатора струму дана нижче. Підбором резистора отримати на виході трансформатора змінну напругу 2 ÷ 2.5v. Потужність навантаження RN1 повинна відповідати потужності двигуна. 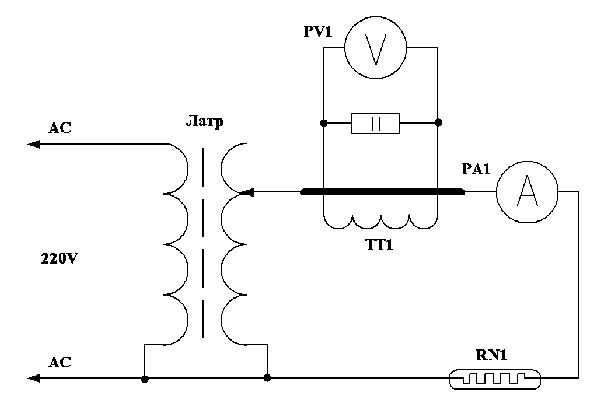
Увага! Трансформатор струму без резистора навантаження не включати.
Підключаємо трансформатор струму до ланцюга зворотного зв'язку P1 та P2. На час налаштування «Регулятора» бажано випаяти діод D12, щоб унеможливити помилкове спрацювання захисту.
Осцилограми у контрольних точках КТ8, КТ9, КТ10 повинні бути як на малюнку нижче. 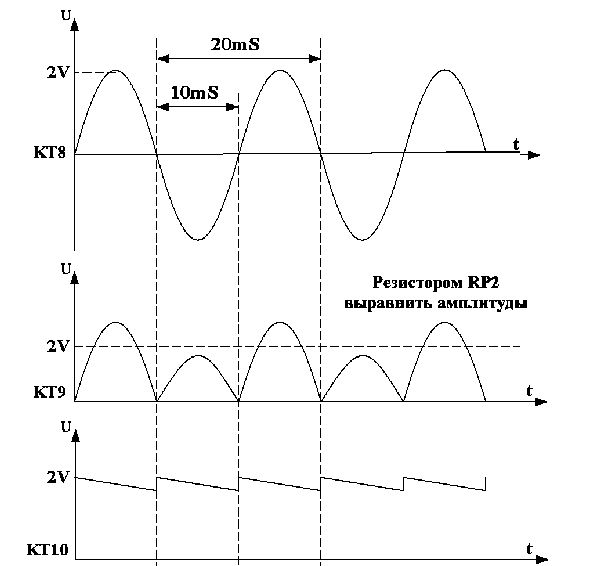
Подальше налаштування таке саме як і у випадку з використанням тахогенератора.
Якщо використовується зворотний зв'язок з напругою якоря двигуна.
Як зазначалося вище, можна застосувати зворотний зв'язок по якірній напрузі, для цього збирається датчик якірної напруги. Налаштування блоку керування здійснюється наступним чином. Резистори "Завдання" та "Масштабування Uoc" виставляються в середнє положення. Резистор R5 датчика якірної напруги виводиться в нижнє до "землі" положення. Включаємо привід та виставляємо напругу на якорі двигуна приблизно 110 вольт. Контролюючи напругу на якорі двигуна, починаємо обертати резистор R5. У певний момент регулювання напруга якорі почне знижуватися, це свідчить у тому, що почав працювати зворотний зв'язок.
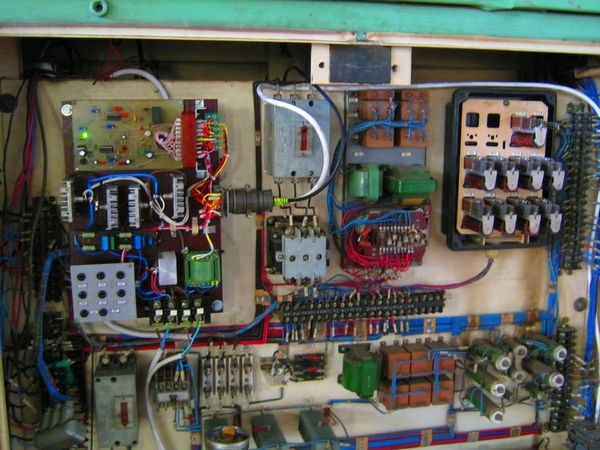
Цей блок керування виготовлявся для розточувального верстата. Ось фото цього монстра 
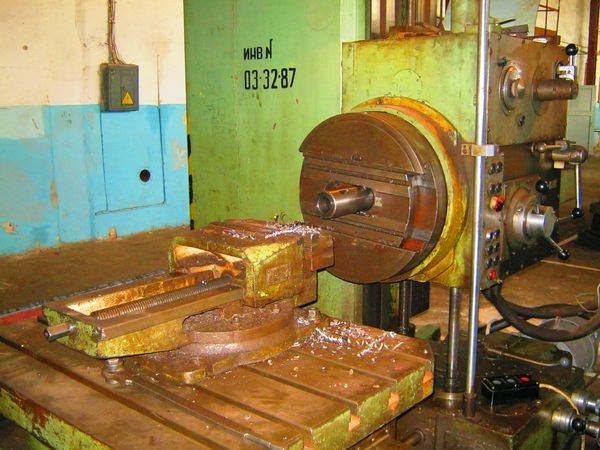
На цьому верстаті вийшов з ладу електромашинний підсилювач, який керував двигуном постійного струму переміщення столу.
Ось такий електромашинний підсилювач. 
Натомість і робився даний блок управління.
Ось фото самого двигуна постійного струму. 
Блок управління був зібраний на ізоляційній основі, де розміщені всі основні елементи. 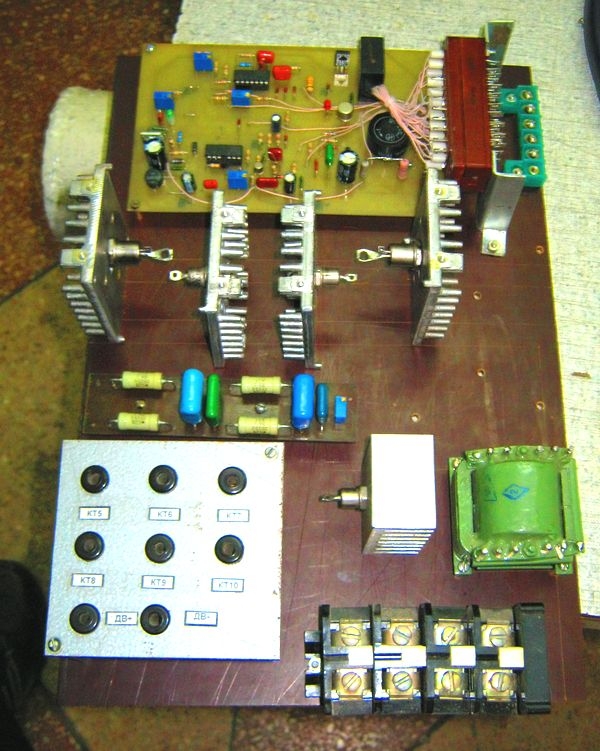
Силові діоди та тиристори встановлені на тепловідведення. Також була зроблена панель з роз'ємами, куди були виведені сигнали з контрольних точок схеми. Це робилося для зручності налаштування та ремонту безпосередньо на верстаті.
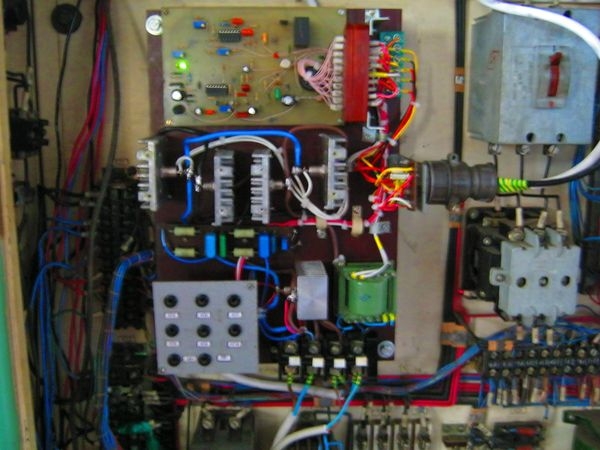
Ось змонтований блок керування в силовій шафі верстата 
З іншого боку силової шафи було встановлено маленький пульт управління. 
На ньому розташовані:
-Тумбер включення блоку
-Тумблер режиму роботи. Так як для настановних переміщень столу верстата, точний контроль і стабілізація оборотів не потрібні, на цей час ланцюг зворотного зв'язку шунтується.
-Ручки регулювання кількості оборотів. Було поставлено два змінних резистора, один для грубого регулювання, другий - багатооборотний - для точної установки потрібних оборотів при чорновому та чистовому розточуванні деталі.
Кому цікаво, нижче представлено відео роботи верстата. Спершу показується розточування отвору в сталевій плиті товщиною 20мм. Потім з'являється з якою частотою обертається гвинт подачі столу верстата. З цією швидкість подається деталь на різець, а таку частоту обертання гвинта, що подає, забезпечує двигун постійного струму, для якого, власне, все це і робилося.
Блок управління показав себе добре, збоїв та аварій не було.
Володимир Рентюк, Запоріжжя, Україна
У статті дається короткий оглядта аналіз популярних схем, призначених для керування колекторними двигунами постійного струму, а також пропонуються оригінальні та маловідомі схемотехнічні рішення
Електродвигуни є, напевно, одним із наймасовіших виробів електротехніки. Як каже нам всезнаюча Вікіпедія, електричний двигун - електрична машина(електромеханічний перетворювач), в якій електрична енергіяперетворюється на механічну. Початком його історії можна вважати відкриття, яке зробив Майкл Фарадей у далекому 1821, встановивши можливість обертання провідника в магнітному полі. Але перший більш-менш практичний електродвигун з ротором, що обертається, чекав свого винаходу до 1834 року. Його під час роботи в Кенігсберзі винайшов Моріц Герман фон Якобі, відоміший у нас як Борис Семенович. Електродвигуни характеризують два основні параметри - це швидкість обертання валу (ротора) і момент обертання, що розвивається на валу. Загалом обидва ці параметри залежать від напруги, що подається на двигун і струму в його обмотках. В даний час є досить багато різновидів електродвигунів, і оскільки, як зауважив наш відомий літературний персонаж Козьма Прутков, не можна осягнути неосяжне, зупинимося на розгляді особливостей керування двигунами постійного струму (далі електродвигунами).
До двигунів постійного струму відносяться два типи – це звичні для нас колекторні двигуни та безколекторні (крокові) двигуни. По-перше, змінне магнітне поле, що забезпечує обертання валу двигуна, утворюється обмотками ротора, які запитуються через щітковий комутатор - колектор. Воно взаємодіє з постійним магнітним полем статора, обертаючи ротор. Для роботи таких двигунів зовнішні комутатори не потрібні, їхню роль виконує колектор. Статор може бути виготовлений як із системи постійних магнітів, так і з електромагнітів. У другому типі електродвигунів обмотки утворюють нерухому частину двигуна (статор), а ротор виготовлений із постійних магнітів. Тут змінне магнітне поле утворюється шляхом комутації обмоток статора, яка виконується зовнішньою схемою, що управляє. Крокові двигуни («stepper motor» в англійському написанні) значно дорожчі за колекторні. Це досить складні пристрої із своїми специфічними особливостями. Їх повний опис вимагає окремої публікації та виходить за межі цієї статті. Для отримання більш повної інформації щодо двигунів цього типу та їх схем управління можна звернутися, наприклад, до .
Колекторні двигуни (Малюнок 1) дешевші і, зазвичай, не вимагають складних систем управління. Для їхнього функціонування достатньо подачі напруги живлення (випрямленого, постійного!). Проблеми починають виникати, коли з'являється необхідність регулювання швидкості обертання валу такого двигуна або в спеціальному режимі управління моментом обертання. Основних недоліків таких двигунів три - це малий момент на низьких швидкостях обертання (тому часто потрібний редуктор, а це відбивається на вартості конструкції в цілому). високого рівняелектромагнітних і радіоперешкод (через ковзний контакт у колекторі) і низька надійність (точніше малий ресурс; причина в тому ж колекторі). При використанні колекторних двигунів необхідно враховувати, що струм споживання та швидкість обертання їх ротора залежить від навантаження на валу. Колекторні двигуни більш універсальні і мають ширше поширення, особливо у недорогих пристроях, де визначальним чинником є ціна.
Оскільки швидкість обертання ротора колекторного двигуна залежить, в першу чергу, від напруги, що подається на двигун, то природним є використання для його управління схем, що мають можливість установки або регулювання вихідної напруги. Такими рішеннями, які можна знайти в Інтернеті, є схеми на основі регульованих стабілізаторівнапруги і оскільки століття дискретних стабілізаторів давно минуло, для цього доцільно використовувати недорогі інтегральні компенсаційні стабілізатори, наприклад, . Можливі варіантитакої схеми представлені на малюнку 2.
Схема примітивна, але здається дуже вдалою та, головне, недорогою. Подивимося її у погляду інженера. По-перше, чи можна обмежити момент обертання чи струм двигуна? Це вирішується встановленням додаткового резистора. На малюнку 2 він позначений як R LIM. Його розрахунок є у специфікації, але він погіршує характеристику схеми як стабілізатора напруги (про це буде нижче). По-друге, який із варіантів управління швидкістю краще? Варіант на малюнку 2а дає зручну лінійну характеристику регулювання, тому він і популярніший. Варіант на малюнку 2б має нелінійну характеристику. Але в першому випадку при порушенні контакту в змінному резистори ми отримуємо максимальну швидкість, а у другому – мінімальну. Що вибрати – залежить від конкретного застосування. Тепер розглянемо один приклад для двигуна з типовими параметрами: робоча напруга 12; максимальний робочий струм 1 А. ІМС LM317, залежно від суфіксів, має максимальний вихідний струм від 0.5 А до 1.5 А (див. специфікацію ; є аналогічні ІМС з більшим струмом) і розвинений захист (від перевантаження і перегріву). З цього погляду для нашого завдання вона підходить ідеально. Проблеми ховаються, як завжди, у дрібницях. Якщо двигун буде виведений на максимальну потужність, що для нашого застосування вельми реально, то на ІМС, навіть при мінімально допустимій різниці між вхідною напругою V IN і вихідним V OUT , що дорівнює 3 В, буде розсіюватися потужність не менше
P = (V IN - V OUT)×I = 3×1 = 3 Вт.
Таким чином, потрібний радіатор. Знову питання - на яку потужність, що розсіюється? на 3 Вт? А ось і ні. Якщо не полінуватися і розрахувати графік навантаження ІМС залежно від вихідної напруги (це легко виконати в Excel), то ми отримуємо, що за наших умов максимальна потужність на ІМС буде розсіюватися не при максимальній вихідній напрузі регулятора, а при вихідній напрузі 7.5 В ( див. Малюнок 3), і вона становитиме майже 5.0 Вт!
Як бачимо, виходить щось уже не дешеве, але дуже громіздке. Так що такий підхід годиться тільки для малопотужних двигунів з робочим струмом не більше 0.25 А. У цьому випадку потужність на ІМС, що регулює, буде на рівні 1.2 Вт, що вже буде прийнятно.
Вихід зі становища - використовуватиме управління метод широтно-импульсной модуляції (ШИМ). Він, справді, найпоширеніший. Його суть – подача на двигун промодульованих за тривалістю однополярних прямокутних імпульсів. Згідно з теорією сигналів, у структурі такої послідовності є постійна складова, пропорційна відношенню τ/T, де: τ - тривалість імпульсу, а T - період послідовності. Ось вона й управляє швидкістю двигуна, який виділяє її як інтегратор у цій системі. Оскільки вихідний каскад регулятора на основі ШІМ працює в ключовому режимі, він, як правило, не потребує великих радіаторів для відведення тепла, навіть при відносно великих потужностяхдвигуна, і ККД такого регулятора незрівнянно вище за попередній. У ряді випадків можна використовувати понижуючі або підвищують DC/DC-перетворювачі, але вони мають ряд обмежень, наприклад, по глибині регулювання вихідної напруги та мінімального навантаження. Тому зазвичай частіше зустрічаються інші рішення. «Класичне» схемне рішення такого регулятора наведено на Рисунку 4 . Воно використане як дросель (регулятор) у професійній моделі залізниці.
На першому операційному підсилювачі зібрано генератор, на другому компаратор. На вхід компаратора подається сигнал з конденсатора C1, а шляхом регулювання порога спрацьовування формується сигнал прямокутної форми з потрібним ставленням τ/T (Малюнок 5).
Діапазон регулювання встановлюється підстроювальними резисторами RV1 (швидше) і RV3 (повільніше), а саме регулювання швидкості здійснюється резистором RV2 (швидкість). Звертаю увагу читачів, що в Інтернеті на форумах російськомовних гуляє схожа схема з помилками в номіналах дільника, що задає поріг компаратора. Управління безпосередньо двигуном здійснюється через ключ на потужному польовому транзисторі типу. Особливості цього транзистора типу MOSFET - великий робочий струм (30 А постійного і до 120 А імпульсного), надмалий опір відкритого каналу (40 мОм) і, отже, мінімальна потужність втрат у відкритому стані.
На що потрібно насамперед звертати увагу під час використання таких схем? По-перше, це виконання ланцюга управління. Тут у схемі (Малюнок 4) є невелика недоробка. Якщо згодом виникнуть проблеми з рухомим контактом змінного резистора, ми отримаємо повний майже миттєвий розгін двигуна. Це може вивести з ладу наш пристрій. Яка протиотрута? Встановити додатковий досить високоомний резистор, наприклад, 300 кОм з виведення ІМС 5 на загальний провід. У цьому випадку при відмові регулятора двигун буде зупинено.
Ще одна проблема таких регуляторів – це вихідний каскад або драйвер двигуна. У подібних схемах може бути виконаний як у польових транзисторах, і на біполярних; останні незрівнянно дешевші. Але й у першому і другому варіанті необхідно враховувати деякі важливі моменти. Для керування польовим транзистором типу MOSFET необхідно забезпечити заряд і розряд його вхідної ємності, а вона може становити тисячі пікофарад. Якщо не використовувати послідовний із затвором резистор (R6 на Малюнку 4) або його номінал буде занадто малий, то відносно високих частотахкерування операційний підсилювач може вийти з ладу. Якщо використовувати R6 великого номіналу, то транзистор буде довше перебувати в активній зоні своєї передавальної характеристики і, отже, маємо зростання втрат і нагрівання ключа.
Ще одне зауваження до схеми на Рисунку 4. Використання додаткового діода D2 не має сенсу, оскільки в структурі транзистора BUZ11 вже є свій внутрішній захисний діод з кращими характеристиками, ніж пропонований. Діод D1 також явно зайвий, транзистор BUZ11 допускає подачу напруги затвор-витік ± 20 В, та й переполюсування ланцюга управління при однополярному живленні, як і напруга вище 12 В, неможливі.
Якщо використовувати біполярний транзистор, виникає проблема формування достатнього за величиною базового струму. Як відомо, для насичення ключа на біполярному транзисторі струм його бази повинен бути принаймні не менше 0.06 від струму навантаження. Зрозуміло, що операційний підсилювач такий струм може забезпечити. З цією метою в аналогічному, по суті, регуляторі, який використовується, наприклад, в популярному міні-гравері PT-5201 компанії, застосований транзистор, що є схемою Дарлінгтона. Тут цікавий момент. Ці міні-гравери іноді виходять з ладу, але не через перегрівання транзистора, як можна було б припустити, а через перегрівання ІМС (максимальна робоча температура +70 ° С) вихідним транзистором (максимально допустима температура +150 ° С). У виробах, якими користувався автор статті, він був притиснутий до корпусу ІМС і посаджений на клей, що неприпустимо нагрівало ІМС і майже блокувало тепловідведення. Якщо вам трапилося таке виконання, то краще відклеїти транзистор від ІМС і максимально відігнути. За це know-how автор статті був премійований компанією Pro'sKit набором інструментів. Як бачите, все потрібно вирішувати в комплексі - дивитися не тільки на схемотехніку, але й уважно ставиться до конструкції регулятора в цілому.
Є ще кілька цікавих схем простіших ШИМ-регуляторів. Наприклад, дві схеми на одиночному операційному підсилювачі з драйвером опубліковані в [
Там, де потрібне плавне і точне регулювання швидкості та крутного моменту електромотора в широких межах, необхідна схема управління двигуном постійного струму
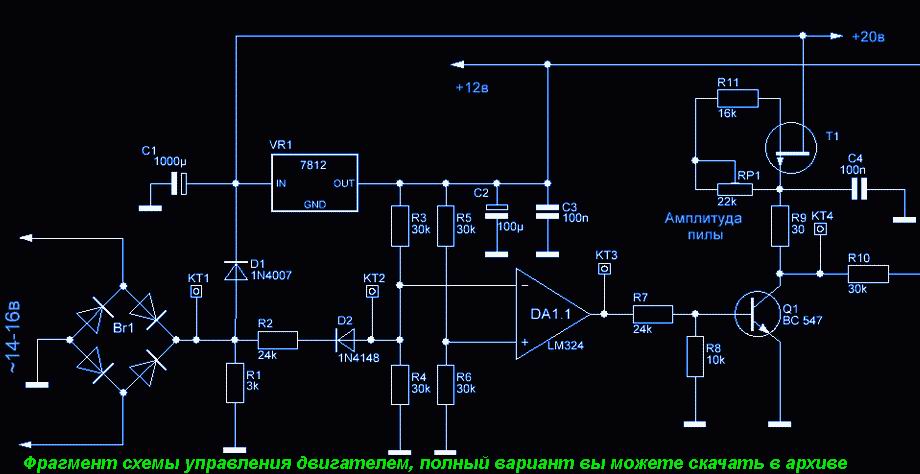
СИФУ - Система Імпульсно Фазового Управління здійснює синусоїдальне перетворення напруги мережі на послідовність прямокутних імпульсів, наступних на регулюючі висновки силових тиристорів. При включенні схеми змінна напруга номіналом 14 - 16 вольт проходить на мостовий випрямляч і перетворюється на пульсуючу, що служить не тільки для живлення конструкції, але і для синхронізації роботи пристрою. Діод D2 не дозволяє згладжувати імпульси ємності С1. Потім імпульси йдуть на «детектор нуля», виконаний на операційному підсилювачі LM324 елементі DA1.1, включеного в режимі компаратора. Поки імпульси відсутні, напруги на прямому та інверсному входах ОУ приблизно однакові та компаратор збалансований.
При проходженні синусойди через точку нуля, на інверсному вході компаратора з'являються імпульси, що перемикають компаратор, в результаті чого на виході DA1.1 генеруються прямокутні синхроімпульси, період яких залежить від точки нуля. Подивіться на осцилограми, щоб зрозуміти принцип роботи. Зверху донизу: КТ1, КТ2, КТ3.
Управління двигуном постійного струму схема була промодельована у програмі. В архіві з повним варіантом даної конструкції є файл проекту для цієї програми. Можна його відкрити і наочно подивитися як працює даний вузол, а відповідно зробити остаточні висновки про керування двигуном постійного струму, до початку збирання радіоаматорської саморобки.
Повернемося до роботи - синхроімпульси йдуть на інтегратор з транзисторним ключем (С4, Q1), де генерується пилкоподібна напруга. У момент проходження фази через точку нуля синхроімпульс відмикає перший транзистор, який розряджає ємність С4. Після спаду імпульсу транзистор замикається і здійснюється заряд ємності до приходу наступного синхроімпульсу, в результаті чого на колекторі транзистора (осцилограма КТ4) утворюється лінійно наростаюча пилкоподібна напруга, стабілізована генератором стабільного струму на уніполярному транзисторі.
Амплітуда пилкоподібної напруги близько 9 вольт визначається підстроювальним опором RP1. Ця напруга додається до прямого входу компаратора DA1.2. Напруга завдання слід на інверсний вхід компаратора DA1.2 і в момент часу, коли амплітуда пилкоподібної напруги перевищує величину напруги на вході інверсному, компаратор перекидається в протилежний стан і на його виході генерується імпульс (осцилограма КТ4).
Імпульс диференціюється через ланцюжок пасивних радіокомпонентів R14, C6 і слідує на базу другого біполярного транзистора, який завдяки цьому відкривається і імпульсному трансформаторі утворюються імпульси відкриття силових тиристорів. Збільшуючи або зменшуючи напругу завдання, можна регулювати шпаруватість імпульсів КТ5.
Але ніяких імпульсів на осцилограмі КТ5 ми не побачимо, доки не натиснемо тумблер S1. Коли він не натиснутий, напруга живлення +12в через фронтові контакти S1 через R12 D3 слід на інверсний вхід DA1.2. Так як ця напруга вище напруга "пили", компаратор закривається, і імпульси тиристори, що відкривають, не генеруються.
Для запобігання аварійним ситуаціям і поломці електродвигуна, якщо не виставлений на «0» регулятор обертів, у схемі є вузол розгону на елементах C5, R13 призначений для плавного розгону двигуна.
При натисканні тумблера S1 контакти розмикаються і ємність С5 починає заряджатися плавно, а напруга на негативній обкладці конденсатора наближається до нуля. Напруга на вході, що інвертує DA1.2 зростає до величини напруги завдання, і компаратор починає генерувати імпульси для відкриття силових тиристорів. Час заряду визначається радіокомпонентами C5, R13.
Якщо в процесі роботи двигуна знадобиться відрегулювати його обороти до схеми доданий вузол розгону і гальмування R21, C8, R22. При збільшенні або зменшенні напруги завдання, ємність С8 плавно заряджається або розряджається, що виключає різке "накидання" напруги на інверсному вході і як наслідок виключає різкий кидок оборотів двигуна.
Регулятор застосовується підтримки постійних оборотів у зоні регулювання. Регулятор виконаний на основі диференціального підсилювача з підсумовуванням двох напруг: завдання та зворотного зв'язку. Напруга завдання формується опором RP1 і через фільтр на компонентах R20, C8, R21, що виконує функції вузла розгону і гальмування, надходить на інверсний вхід DA1.3. Зі зростанням напруги завдання на виході DA1.3 лінійно знижується вихідна напруга.
Вихідна напруга регулятора слід на інверсний вхід компаратора СІФУ DA1.2 де, підсумовуючи імпульсами "пили", перетворюється на серію прямокутних імпульсів наступних на електроди тиристорів. При збільшенні або зменшенні напруги завдання збільшується або зменшується вихідна напруга на виході силового вузла. На графіку відображено залежність обертів двигуна від напруги завдання.
Дільник напруги на резисторах R22, R23, під'єднаний на прямий вхід регулятора DA1.3, призначений для виключення аварійної ситуації при обриві зворотного зв'язку.
При включенні приводу тахогенератор генерує напругу, пропорційну оборотам електромотора. Ця напруга йде на вхід прецизійного детектора DA1.4, DA2.1, побудованого за класичною двонапівперіодною схемою. З його виходу напруга слідує через фільтр на пасивних компонентах C10, R30, R33 на підсилювач, що масштабує, ОС DA2.2. Підсилювач використовується для припасування напруги ОС, що йде з тахогенератора. Напруга з виходу DA2.2 потрапляє на вхід DA1.3 та на схему захисту DA2.3.
Опіром RP1 генеруються обороти електродвигуна. При роботі без навантаження, напруга на виході підсилювача, що масштабує, менше напруги на шостому висновку DA1.3, тому привід працює як регулятор.
Зі зростанням навантаження на валу, знижується напруга, що знімається з тахогенератора і в результаті знижується напруга з виходу, підсилювача, що масштабує. Коли цей рівень буде меншим ніж на нозі 5 ОУ DA1.3 привід увійде в зону стабілізації струму. Зниження напруги на неінвертуючому вході DA1.3 знизить напруги на його виході, оскільки він працює на інвертуючий підсилювач DA1.2, це збільшить кут відкриття тиристорів і, отже, до зростання рівня на якорі електродвигуна.
Захист від перевищення обертів зібраний на операційному підсилювачі DА2.3, включеного як компаратор. На його інверсний вхід надходить опорна напруга із дільника R36, R37, RP3. Опір RP3 регулює рівень спрацьовування захисту. Напруга з виходу підсилювача DA2.2 йде на прямий вхід DA2.3.
При перевищенні оборотів вище номінальних, на прямому вході компаратора перевищується поріг уставки захисту, що визначається опором RP3 і переключитися компаратор.
Завдяки наявності в схемі позитивного зворотного зв'язку R38 призводить до "защіпки" компаратора, а діод VD12 не дає скинеться компаратору. При спрацьовуванні захисту, з виходу компаратора через діод VD14 слід на інверсний вхід 13 DA1.2 СІФУ, оскільки напруга захисту вище рівня «пили» відбудеться миттєва заборона видачі керуючих імпульсів на електроди силових тиристорів.
Напруга з виходу компаратора захисту DA2.3 відмикає транзистор VT4, через що включається реле Р1.1 і спалахує світлодіод, що сигналізує про аварію. Зняти захист вийде якщо повністю відключити привід, і, витримавши паузу в 5 - 10 секунд, знову подати на нього живлення.
Силова частина блоку управління представлена на малюнку нижче:
Трансформатор Tr1 використовується живлення схеми блоку управління. Випрямляч зібраний за напівмостовою схемою і включає два силові діоди D1, D2 і два силові тиристори Т1, Т2, а також захисний діод D3. Обмотка збудження живиться від окремого трансформатора і випрямляча. Якщо двигуні немає тахогенератора, то ОС, контролю оборотів, можна реалізувати так:
Якщо застосовується струмовий трансформатор, перемичку P1 на схемі блоку управління двигуном постійного струму потрібно встановити в положення 1-3.
Ще можна застосувати датчик якірної напруги:
Датчик якірної напруги це фільтр – дільник, приєднаний безпосередньо до клем якоря. Налаштування приводу здійснюється в такий спосіб. Опір "Завдання" та "Масштабування UOC" викручуються в середнє положення. Опір R5 датчика якірної напруги викручується щонайменше. Включаємо привід та виставляємо напругу на якорі близько 110 вольт. Вимірюючи напругу на якорі, починаємо обертати опір R5. У певний момент зміни, напруга на якорі почне падати, це свідчить, що спрацювала ОС.
Креслення друкованої плати керування двигуном постійного струму виконано у програмі і ви легко зможете виготовити друковану плату своїми руками методом
Налаштування конструкції почнемо з перевірки напруги живлення на ОУ DA1, DA2. Мікросхеми рекомендується встановлювати на панельки. Потім перевіряємо осцилограми у контрольних точках КТ1, КТ2, КТ3. У точці КТ4. ми повинні побачити пилкоподібні імпульси при розімкнутій кнопці.
Підстроювальним опором RP1 виставляємо розмах «пили» близько 9 вольт. У контрольній точці КТ3 тривалість імпульсу близько 1.5 - 1.8ms, якщо ми цього не бачимо, зменшенням опору R4 домагаємося необхідної тривалості.
Обертаючи важіль RR1 у контрольній точці КТ5, контролюємо зміну шпаруватості імпульсів від максимуму до повного їх зникнення при мінімальному опорі RR1. При цьому повинна змінюватися яскравість лампочки підключеної до силового блоку, яку ми підключили як навантаження.
Потім під'єднуємо блок управління до двигуна та тахогенератора. Встановлюємо регулятором RR1 напругу на якорі 40-50 вольт. Опір RP3 має бути в середньому положенні. Вимірюючи напругу на якорі двигуна, обертаємо опір RP3. У певний момент налаштування напруга на якорі почне падати, це говорить про те, що спрацював зворотний зв'язок.
Якщо використовується ОС струму якоря потрібен струмовий трансформатор, включений в ланцюг живлення випрямляча. Схема калібрування трансформатора струму розглянута нижче. Підбором опору одержати на виході трансформатора змінну напругу 2 ÷ 2.5v. Потужність навантаження RN1 повинна дорівнювати потужності двигуна
Пам'ятайте, що струмовий трансформатор без резистора навантаження не рекомендується.
Підключаємо трансформатор струму до ланцюга ОС P1 та P2. На час регулювання рекомендується випаяти діод D12, щоб уникнути помилкового спрацьовування захисту. Осцилограми у контрольних точках КТ8, КТ9, КТ10 показані на малюнку нижче.
Подальше регулювання таке саме як і у випадку з використанням тахогенератора.
Цей блок керування двигуном постійного струму виготовлявся своїми руками для розточувального верстата. Фотографії дивись в архіві за зеленим посиланням вище.
В електродвигунах постійного струму крутний момент породжується реакцією між двома магнітними полями: одне поле встановлюється стаціонарною обмоткою збудження, а інше - обмотками в якорі, що обертається. У деяких двигунів постійного струму відсутня обмотка збудження, замість якої встановлені великі постійні магніти, що зберігають стаціонарне магнітне поле постійним за будь-яких робочих умов.
У будь-якому випадку принцип роботи електродвигуна постійного струму полягає в тому, що струм, проходячи через якір, створює магнітне поле, що намагається вирівнятися зі стаціонарним полем. І тому якір обертається:
Однак, колектор(так називається набір сегментованих мідних планок), розриває електричний контакт з вже «вирівняною» обмоткою і збуджує іншу обмотку (або як у простому прикладі, показаному вище, перезбуджує той самий ланцюг у протилежному напрямку), створюючи інше не вирівняне магнітне поле, яке продовжує обертати якір. Електричний контакт між сегментами колектора, що обертаються, і стаціонарним джерелом живлення відбувається через вугільні щітки. Ці щітки зношуються через певний час (як сам колектор) і тому вимагають періодичної заміни.
Більшість промислових електродвигунів постійного струму виготовляються з кількома обмотками якоря, а не з одного, як показано на спрощеній ілюстрації згори. Фотографія великого (1250 л. с.) електромотора постійного струму, що використовується для руху порома, з обмотками і якорем показана тут:
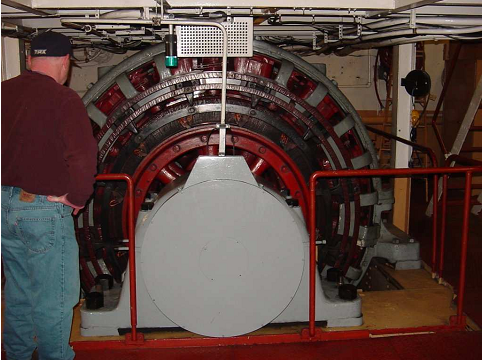
На одному щітковому вузлі цього електромотора крупним планом показані обидві вугільні щітки, пружний тримач і безліч колекторних планок, з якими контактує щітка при обертанні якоря.

У електродвигунах постійного струму виявляються такі відносини між механічними та електричними величинами:
Обертаючий момент:
- Момент прямо пропорційний силі магнітного поляякоря, яка, своєю чергою, прямо пропорційна струму, що проходить через обмотки якоря;
- Момент також прямо пропорційний силі постійного магнітного поля, яке, своєю чергою, прямо пропорційно струму, що проходить через збуджуючу обмотку (у двигуні без магнітів).
- Швидкість обмежена ЕРС, що генерується якорем при обертанні в постійному магнітному полі. Ця ЕРС прямо пропорційна швидкості обертання якоря, а також прямо пропорційна силі постійного магнітного поля (яка прямо пропорційна струму збудливої обмотки в електродвигуні без магнітів);
- Отже, швидкість прямо пропорційна напрузі якоря;
- Також швидкість обернено пропорційна силі постійного магнітного поля, яка прямо пропорційна струму, що проходить через збудливі обмотки (у двигуні без магнітів).
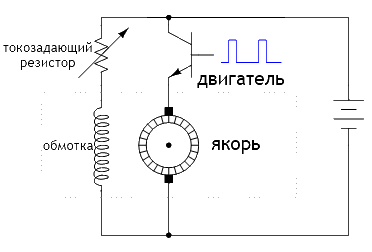
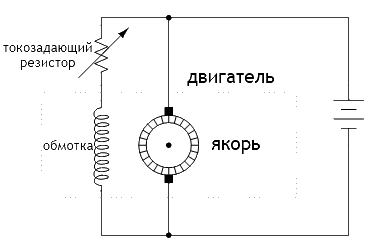
Опір, що зменшується, токозадаючого резистора, дозволяє більшому струму протікати через збудливу обмотку, посилюючи її магнітне поле. Це вплине на роботу двигуна: по-перше, двигун буде виробляти більший момент, ніж був до цього (при тій же величині струму якоря), так як сильніше магнітне поле якоря буде впливати на якір; по-друге, швидкість двигуна зменшиться, так як велика проти-ЕРС буде генеруватися якорем, що обертається, при тій же швидкості обертання, і ця проти-ЕРС природно спробує зрівнятися з прикладеною напругою джерела постійного струму. З іншого боку, ми можемо збільшити швидкість електродвигуна постійного струму (і зменшити вихідний момент) збільшенням опору резистора, що управляє, послаблюючи стаціонарне магнітне поле, яке обертає якір.
Регулюванням струму обмотки можна змінювати баланс між швидкістю та моментом, але цього недостатньо для управління загальною потужністюдвигуна. Щоб керувати вихідною потужністю електродвигуна постійного струму, ми також повинні керувати напругою і струмом якоря. Змінні резисториможна застосувати і для цього завдання, але цей метод не використовується в даний час, оскільки призводить до втрати потужності.
Найкращим рішенням буде застосування електронної схеми регулювання потужності транзисторних ключівшвидко вимикають і включають якір двигуна в ланцюг. Такий тип управління називається широтно-імпульсною модуляцією, або ШІМ.
(Ставлення тривалості імпульсу до періоду прямування, зворотна до свердловинивеличина) імпульсу визначає частку потужності, що доставляється до двигуна:
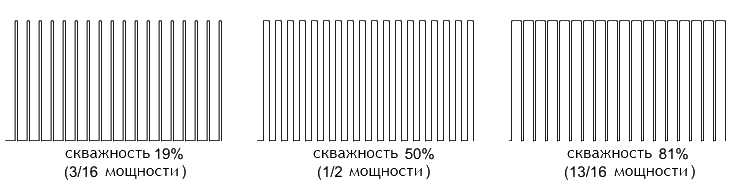
На малюнках помилка - не "шпаруватість", а "коефіцієнт заповнення"
Така електронна схемарегулювання потужності зазвичай називається приводом. Таким чином, привід з регульованою швидкістю (або VSD) - це високопотужна схема, яка використовується для керування швидкістю постійного струму. Моторні приводи можуть бути вручну налаштовані на пуск двигуна із заданою швидкістю, або можуть приймати електронні сигнали для зміни швидкості двигуна таким же чином як електронні сигнали управляють рухом . Оснащений дистанційною системоюпередачі керуючих сигналів, привід функціонує подібно до будь-якого іншого кінцевого виконавчого елементу: слідуючи командам контролера, стабілізує певний технологічний параметр, .
За традиційною технологією для імпульсного харчуваннядвигуна постійного струму використовують схему керованого випрямляча, в якому для перетворення змінного струмув постійний замість звичайних діодів, що випрямляють, використовують тиристори. Основним джерелом живлення промислових двигунів постійного струму залишається змінний струм, і цей змінний струм повинен бути перетворений на постійний в деякому вузлі системи; управління має сенс інтегрувати прямо в цей випрямляючий вузол:
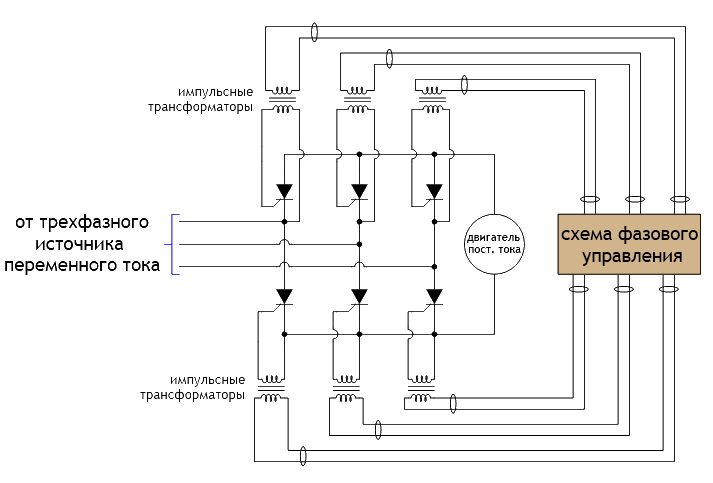
Схема керованого випрямляча працює за принципом зміни часу "пускового" імпульсу щодо імпульсів коливань змінного струму. Чим раніше в кожному періоді змінного струму відкриється тиристор, тим довше він пропускатиме струм до двигуна. Схема фазового управління відповідає за генерацію імпульсів та їх тривалість.
Привід постійного струму, що просто регулює потужність, що надходить до двигуна, був би непродуманим і важко застосовним для управління більшістю процесів. Чого б в ідеалі хотілося від регульованого приводу, то це точного управління швидкістюдвигуна. З цієї причини більшість приводів розраховано отримання зворотного зв'язку від тахометра, механічно з'єднаного з валом мотора. Тахометр зазвичай є невеликим генератором, що створює постійна напруга, Прямо пропорційне швидкості обертання валу (з виходом 0-10 В). За його показаннями регульований привід дроселює електричну потужність, що підводиться до двигуна так, щоб швидкість обертання збіглася із заданою керуючим сигналом. Маючи вбудований контур зворотного зв'язку регулювання швидкості, регульований привід стає «відомим контролером» у системі управління. Привід може приймати вихідний сигнал уставки швидкості від