มอเตอร์แบบอะซิงโครนัสด้วย โรเตอร์กรงกระรอกเป็นตัวขับเคลื่อนหลักของกลไกเรือส่วนใหญ่ที่ไม่ต้องการการควบคุมความเร็วที่กว้าง ง่ายต่อการผลิตและใช้งาน มีความน่าเชื่อถือและความทนทานสูง และมีต้นทุนค่อนข้างต่ำ
คุณสมบัติเริ่มต้นของมอเตอร์เหนี่ยวนำถูกประเมินโดยคุณสมบัติเริ่มต้น:
ค่าของ Ip ปัจจุบันเริ่มต้นหรือหลายหลากของ Ip / Inom;
ค่าของ Mp เริ่มต้นหรือหลายหลากของ Mp / Mp nom;
ระยะเวลาและความนุ่มนวลในการสตาร์ทเครื่องยนต์
ความซับซ้อนของการดำเนินการเปิดตัว
ความคุ้มค่าของการดำเนินการเปิดตัว (ต้นทุนและความน่าเชื่อถือของอุปกรณ์เปิดตัว) รวมถึงการสูญเสียพลังงาน
เริ่มต้นมูลค่าปัจจุบัน
,………………….(7)
โดยที่ R 1 และ X 1 เป็นความต้านทานเชิงแอคทีฟและอุปนัยของสเตเตอร์ และ R 2 และ X 2 คือความต้านทานเชิงแอคทีฟและอุปนัยของโรเตอร์ที่ลดลง
จากการวิเคราะห์ (7) เป็นไปได้ที่จะปรับปรุงคุณสมบัติการสตาร์ทของเครื่องยนต์โดยการเพิ่มความต้านทานเชิงแอคทีฟของวงจรโรเตอร์ R 2 เนื่องจากในกรณีนี้กระแสเริ่มต้นจะลดลงและแรงบิดเริ่มต้นจะเพิ่มขึ้น การลดแรงดันไฟฟ้า U 1 ส่งผลดีต่อ Ip (การลดค่าของมัน) อย่างไรก็ตาม แรงบิดเริ่มต้น Mp ก็ลดลงเช่นกัน ความเป็นไปได้ของการใช้วิธีนี้หรือวิธีการนั้นในการปรับปรุงลักษณะการสตาร์ทนั้นพิจารณาจากประเภทของเครื่องยนต์ สภาพการทำงาน และข้อกำหนดสำหรับมัน
การควบคุมไดรฟ์สำหรับกลไกที่ไม่สามารถย้อนกลับได้ส่วนใหญ่มักประกอบด้วยการสตาร์ทและปิดมอเตอร์ไฟฟ้าจากระยะไกล วงจรประเภทนี้สามารถทำงานอัตโนมัติได้อย่างง่ายดายโดยเปลี่ยนปุ่มควบคุมแบบแมนนวลด้วยอุปกรณ์ที่ปิดหรือเปิดหน้าสัมผัสเมื่อถึงค่าเกณฑ์ของพารามิเตอร์ เมื่อจำเป็นต้องเปิดหรือปิดมอเตอร์
ก) วิธีที่ง่ายที่สุดในการเชื่อมต่อมอเตอร์แบบอะซิงโครนัสคือการสตาร์ทโดยตรงโดยใช้สตาร์ทเตอร์แบบแม่เหล็ก (รูปที่ 5.18)
ที่นี่เมื่อกดปุ่ม SB2 (เริ่ม) คอยล์ของคอนแทคเตอร์เชิงเส้น KM จะได้รับพลังงานและมอเตอร์จะเปิดเข้ากับแหล่งจ่ายไฟหลัก เมื่อกดปุ่ม SB1 (หยุด) คอยล์ KM จะสูญเสียพลังงาน และเครื่องยนต์จะตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลัก เมื่อมอเตอร์ไฟฟ้าทำงานหนักเกินไป หน้าสัมผัสของรีเลย์ความร้อน KK จะเปิดขึ้น ซึ่งจะยกเลิกการทำงานของวงจรคอนแทคเตอร์ KM ด้วย เริ่มต้นปัจจุบัน มอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์กรงกระรอกที่เชื่อมต่อโดยตรงกับเครือข่ายถึง (6-7) ฉันชื่อ ตัวอย่างเช่น หากกำลังของเครื่องยนต์ที่สตาร์ทคือ 30% ของกำลังของเครื่องกำเนิดไฟฟ้าที่ทำงานอยู่ แสดงว่ามีขนาดใหญ่มาก เริ่มต้นปัจจุบันทำให้แรงดันไฟหลักในระยะสั้นลดลงอย่างรวดเร็ว เรียกว่าแรงดันไฟตก 15-20% ด้วยกำลังสัมพัทธ์ที่สูงกว่าของเครื่องยนต์ แรงดันตกคร่อมจะเพิ่มขึ้นอย่างมาก ซึ่งอาจนำไปสู่การปิดตัวสตาร์ทแม่เหล็กของไดรฟ์ไฟฟ้าที่ใช้งาน ไปจนถึงกระแสไฟของเครื่องกำเนิดไฟฟ้าและการทำงานของการป้องกัน ฯลฯ ดังนั้นเครื่องยนต์ที่สมส่วนกับเครื่องกำเนิดพลังงานบนเรือจึงเริ่มต้นตามรูปแบบพิเศษที่จำกัดความแรงของกระแสเริ่มต้น
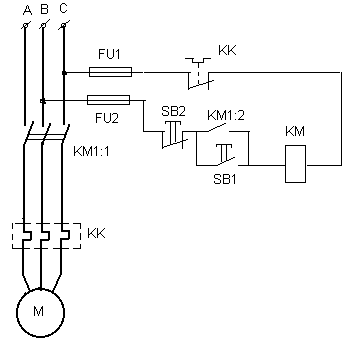
รูปที่ 5.18 โครงการเริ่มต้นความดันโลหิตโดยตรง
b) เริ่มต้นด้วยการรวมตัวต้านทานในวงจรสเตเตอร์ (รูปที่ 5.19) การเร่งความเร็วของเครื่องยนต์ดำเนินการในสองขั้นตอน ในระยะแรก ความต้านทานจะรวมอยู่ในวงจรของทั้งสามเฟส ซึ่งจะถูกปัดออกในขั้นตอนที่สองโดยหน้าสัมผัสของคอนแทคเตอร์เร่งความเร็ว KM2:1 เวลาทำงานที่สเตจเริ่มต้นถูกควบคุมโดยรีเลย์เวลาแม่เหล็กไฟฟ้า KT1 โครงการทำงานดังนี้ เมื่อกดปุ่ม SB1 (เริ่ม) จะได้รับพลังงานจากรีเลย์ KT1 ซึ่งจะสับเปลี่ยนปุ่ม SB1 ด้วยหน้าสัมผัส KT1:1 และเปิดคอนแทคเตอร์เร่งความเร็ว KM2 และเปิดหน้าสัมผัส KM2:1 ที่ตัดความต้านทานเริ่มต้น และด้วยเหตุนี้จึงเตรียมวงจรสำหรับการเริ่มต้น คอนแทคเตอร์ KM2 ปิดวงจรของคอนแทคเตอร์เชิงเส้น KM1 ซึ่งเชื่อมต่อมอเตอร์กับเครือข่ายผ่านความต้านทานเริ่มต้น R หน้าสัมผัสบล็อค KM1:3 จะแยกปุ่ม SB1 และหน้าสัมผัส KM2:2 ออก โดยให้กำลังแก่คอยล์ KM1 บล็อกที่สองติดต่อ KM1:2 แบ่งวงจรจ่ายไฟของรีเลย์ KT1 ซึ่งจะเปิดหน้าสัมผัสในวงจรของคอนแทค KM2 ด้วยการหน่วงเวลา คอนแทคเตอร์ KM2 ที่มีหน้าสัมผัส KM2:1 ปัดความต้านทานเริ่มต้น R
ความต้านทานเริ่มต้น จำกัดกระแสเริ่มต้นให้เป็นค่าที่ต้องการ
 ;
;
โดยที่ R .P - ตามลำดับ ความต้านทานที่ใช้งานเครื่องยนต์ในโหมดสตาร์ท
โปรดทราบว่าความต้านทานเหล่านี้ไม่คงที่ในระหว่างการเร่งความเร็ว เนื่องจากความต้านทานของโรเตอร์ที่ลดลงซึ่งรวมอยู่ในค่าความต้านทานเหล่านี้จะขึ้นอยู่กับสลิป การสูญเสียแรงดันไฟฟ้า U=I p R ในความต้านทานเริ่มต้นจะลดแรงดันไฟฟ้าบนสเตเตอร์ของมอเตอร์ U d
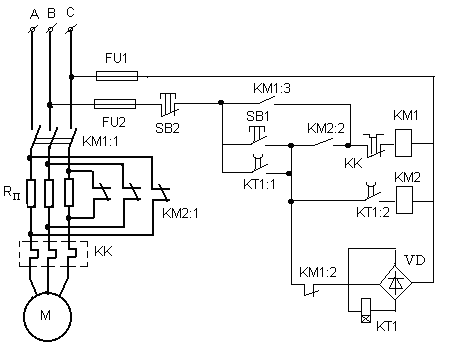
รูปที่ 5.19 แบบแผน (a) และกำหนดการ (b) ของการเริ่มต้น IM โดยการแนะนำ แนวต้านเริ่มต้นในห่วงโซ่
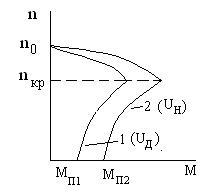
สำหรับมอเตอร์เหนี่ยวนำ แรงบิดบนเพลาจะเป็นสัดส่วนกับกำลังสองของแรงดันไฟ ดังนั้นลักษณะทางกลเริ่มต้นที่มีตัวต้านทานรวมอยู่ในวงจรสเตเตอร์ (เส้นโค้ง 1, รูปที่ 5.19, b) มีแรงบิดเริ่มต้นต่ำกว่าที่แรงดันไฟฟ้าที่กำหนด (M p1 M p2) อย่างมีนัยสำคัญซึ่งเป็นลักษณะของ การเชื่อมต่อโดยตรงมอเตอร์กับเครือข่าย (โค้ง 2) อาจเกิดขึ้นได้ว่าเมื่อเลือกความต้านทานเริ่มต้น RP เพื่อลดกระแสเริ่มต้นจะกลายเป็นขนาดใหญ่จนแรงบิดเริ่มต้น M p1 ไม่เพียงพอที่จะเอาชนะแรงบิดต้านทานและการสตาร์ทจะเป็นไปไม่ได้
c) ออโต้ทรานส์ฟอร์มเมอร์สตาร์ท (รูปที่ 5.20) มีไว้สำหรับสตาร์ทมอเตอร์จากแหล่งจ่ายแรงดันต่ำ - ตัวแปลงอัตโนมัติ ที่นี่กระแสเริ่มต้นที่ใช้จากเครือข่ายเนื่องจากการแปลงแรงดันไฟฟ้าจะน้อยกว่ากระแสที่มอเตอร์ใช้ในระหว่างการสตาร์ทโดยตรง สิ่งนี้นำไปสู่ความจริงที่ว่าในวงจรที่พิจารณาซึ่งตรงกันข้ามกับวงจรก่อนหน้าการลดลงของกระแสเริ่มต้นเกิดขึ้นในระดับเดียวกับการลดลงใน แรงบิดเริ่มต้นบนเครื่องยนต์
วงจรสตาร์ทของตัวเปลี่ยนรูปแบบอัตโนมัติมีราคาแพงกว่าและสมเหตุสมผลเมื่อวงจรที่ถูกกว่าอื่น ๆ ไม่ได้ลดกระแสเริ่มต้นที่จำเป็น วงจรทำงานดังนี้ เมื่อกดปุ่ม SB2 คอนแทคเตอร์ KM2 จะเปิดขึ้น ซึ่งจะเชื่อมต่อตัวเปลี่ยนรูปแบบอัตโนมัติของทีวีกับหน้าสัมผัส KM2: 1 และแยกปุ่ม SB2 และยังจ่ายไฟให้กับคอนแทคเตอร์เชิงเส้น KM1 ด้วย เครื่องยนต์เชื่อมต่อกับเครือข่ายผ่านทีวีรีเลย์เวลา KT1 ของประเภทวาล์วถูกเปิดโดยหน้าสัมผัสเสริม KM1: 2 หลังจากช่วงเวลาหนึ่ง การติดต่อ KT1:1 จะปิดวงจรไฟฟ้าของคอนแทคเร่งความเร็ว KM3 ซึ่งโดยการสัมผัส KM3:1 จะข้ามตัวแปลงอัตโนมัติและเชื่อมต่อมอเตอร์กับเครือข่ายโดยตรง บล็อกหน้าสัมผัส KM3:2 เปิดวงจรไฟฟ้าของคอนแทค KM2 ซึ่งจะเปิดวงจรตัวแปลงอัตโนมัติ หน้าสัมผัสเสริมที่สอง KM3:3 จะรักษาวงจรไฟฟ้าของคอนแทค KM1
รูปที่ 5.20 แผนผังของ autotransformer เริ่มต้นของความดันโลหิต
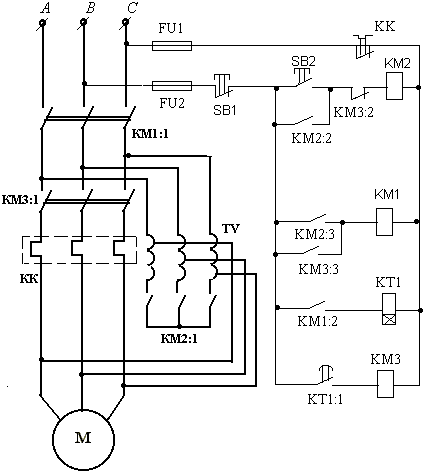
d) เริ่มต้นด้วยการเปลี่ยนสเตเตอร์ที่คดเคี้ยวจากดาวเป็นรูปสามเหลี่ยมตามรูปแบบที่แสดงในรูปที่ 5.21 เมื่อสตาร์ท ขดลวดสเตเตอร์จะเชื่อมต่อเป็นดาว แรงดันเริ่มต้นบนเฟสจะเป็น  น้อยกว่าค่าเล็กน้อยซึ่งจะทำให้กระแสเริ่มต้นลดลง 3 เท่า ในเวลาเดียวกัน แรงบิดเริ่มต้น ซึ่งแปรผันตามกำลังสองของแรงดันไฟฟ้า จะลดลงสามเท่า ซึ่งไม่เป็นที่ยอมรับเสมอไป โดยเฉพาะอย่างยิ่งสำหรับกลไกที่มีโมเมนต์ความต้านทานคงที่อย่างมีนัยสำคัญ
น้อยกว่าค่าเล็กน้อยซึ่งจะทำให้กระแสเริ่มต้นลดลง 3 เท่า ในเวลาเดียวกัน แรงบิดเริ่มต้น ซึ่งแปรผันตามกำลังสองของแรงดันไฟฟ้า จะลดลงสามเท่า ซึ่งไม่เป็นที่ยอมรับเสมอไป โดยเฉพาะอย่างยิ่งสำหรับกลไกที่มีโมเมนต์ความต้านทานคงที่อย่างมีนัยสำคัญ
โครงการทำงานดังนี้ เมื่อกดปุ่ม SB2 รีเลย์เวลาแม่เหล็กไฟฟ้า KT1 จะทำงานซึ่งเชื่อมต่อคอนแทคเตอร์ KM2 (ดาว) ซึ่งปิดด้วยหน้าสัมผัสหลัก KM2: 1 ขดลวดสามเฟสสเตเตอร์ตามรูปแบบดาวและด้วยหน้าสัมผัสเสริม KM2: 3 จะเปิดคอนแทคเตอร์เชิงเส้น KM1 และตัดวงจรของคอนแทค KM3 (สามเหลี่ยม) คอนแทคเตอร์ KM1 ที่มีหน้าสัมผัสหลัก KM1:1 เชื่อมต่อมอเตอร์กับเครือข่าย และด้วยหน้าสัมผัสเสริม KM1:4 จะปิดปุ่มสตาร์ท SB2 ในเวลาเดียวกัน บล็อกหน้าสัมผัส KM1:2 จะยกเลิกการส่งพลังงานให้กับรีเลย์เวลา KT1 ซึ่งปล่อยด้วยการหน่วงเวลา และหน้าสัมผัส KM1:1 จะยกเลิกการจ่ายพลังงานให้กับคอนแทคเตอร์ KM2 ซึ่งจะเปิดการเชื่อมต่อแบบดาว บล็อกหน้าสัมผัส KM2:3 ปิดวงจรของคอนแทค KM3 ซึ่งประกอบแผนภาพการเชื่อมต่อรูปสามเหลี่ยม การทำงานของคอนแทคเตอร์ KM1, KM2, KM3 เชื่อมต่อกันทางไฟฟ้าโดยหน้าสัมผัสเสริมที่เกี่ยวข้อง ซึ่งไม่รวมลำดับการเชื่อมต่อที่ไม่คาดคิดหรือไม่ถูกต้อง
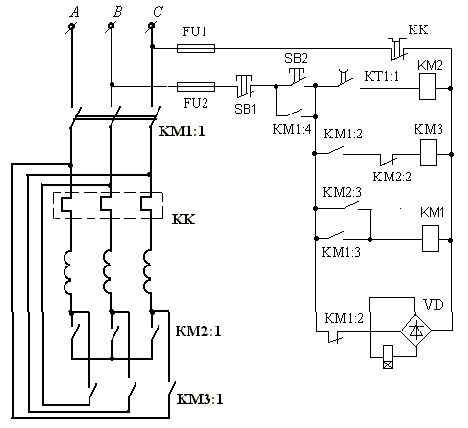
รูปที่ 5.21 แบบแผนของการเริ่มต้น IM โดยการเปลี่ยนสเตเตอร์ที่คดเคี้ยวจากดาวเป็น
สามเหลี่ยม
จ) เริ่มต้นอย่างราบรื่นมอเตอร์ไฟฟ้ากระแสสลับ ในปัจจุบัน ซอฟต์สตาร์ทเตอร์สำหรับมอเตอร์ AC ที่ใช้สวิตช์ไทริสเตอร์และคอนเวอร์เตอร์มีการใช้กันอย่างแพร่หลาย เนื่องจากการเร่งความเร็วที่ราบรื่นของมอเตอร์ไฟฟ้า ทำให้สามารถลดขนาดของกระแสไฟเริ่มต้นได้อย่างมีนัยสำคัญ และด้วยเหตุนี้จึงจำกัดผลกระทบต่อแรงดันไฟฟ้าของเครือข่ายของเรือ
ซอฟต์สตาร์ทเตอร์ที่ทันสมัยคือสามเฟสแบบไม่ย้อนกลับ สวิตช์ไทริสเตอร์(TC) ที่มีระบบควบคุมแบบมัลติฟังก์ชั่น (CS) ที่ใช้ตัวควบคุมไมโครโปรเซสเซอร์ (MC) และอินเทอร์เฟซผู้ใช้ที่พัฒนาขึ้น ซึ่งมาพร้อมกับอุปกรณ์อินพุต-เอาต์พุตของฮาร์ดแวร์สำหรับสัญญาณแบบไม่ต่อเนื่อง (UVV) หลักการทำงานและอุปกรณ์ของสตาร์ทเตอร์อธิบายโดยแผนภาพการทำงานที่แสดงในรูปที่ 5.22.
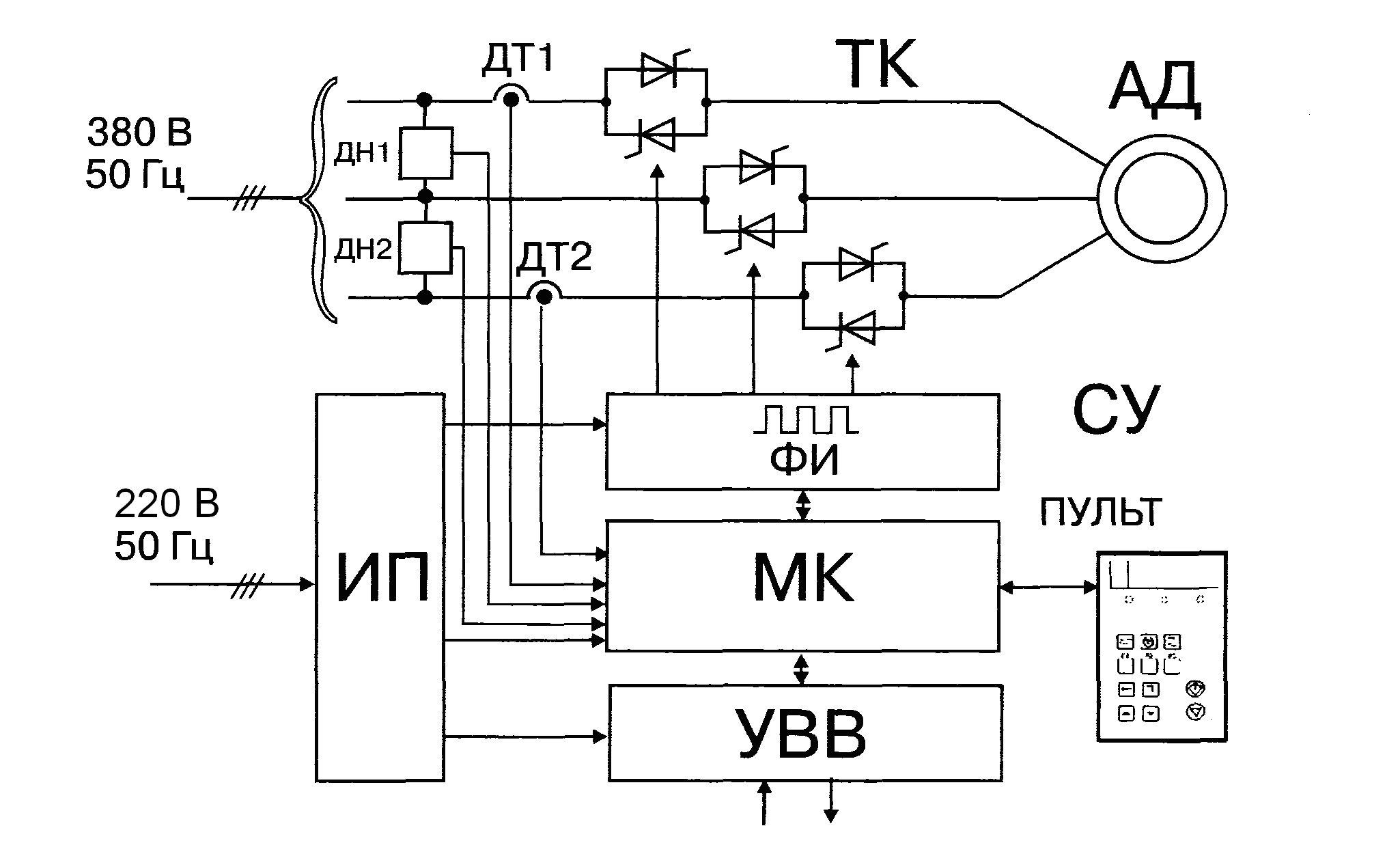
ข้าว. 5.22 ซอฟต์สตาร์ท
องค์ประกอบพลังงานหลักของ TC คือคีย์ไทริสเตอร์ซึ่งเป็นวงจรลูกโซ่ที่ประกอบด้วยลิงก์ที่เชื่อมต่อแบบอนุกรมจำนวนหนึ่ง และแต่ละลิงก์คือไทริสเตอร์สองตัวที่เชื่อมต่อกันแบบต้านขนาน เพื่อให้แรงดันไฟฟ้าเท่ากันระหว่างไทริสเตอร์ที่เชื่อมต่อแบบอนุกรมในโหมดสถิตและไดนามิก ตัวต้านทานและวงจรตัวต้านทาน-ตัวเก็บประจุ รวมทั้งเซ็นเซอร์สถานะไทริสเตอร์จะเชื่อมต่อแบบขนานกับแต่ละลิงก์
ข้อมูลเกี่ยวกับสถานะของไทริสเตอร์จะถูกส่งไปยังระบบควบคุมผ่านสายไฟเบอร์ออปติก ไทริสเตอร์หลักแต่ละตัวมีหน่วยควบคุมหม้อแปลงพัลส์ของตัวเอง เพื่อลดการแพร่กระจายในช่วงเวลาเปิดเครื่องของไทริสเตอร์ที่เชื่อมต่อแบบอนุกรม ขดลวดปฐมภูมิของหม้อแปลงพัลส์จะเชื่อมต่อแบบอนุกรม การแยกที่เป็นไปได้ระหว่างส่วนไฟฟ้าแรงสูงกับระบบควบคุมแรงดันต่ำนั้นดำเนินการโดยใช้สายเคเบิลใยแก้วนำแสงและหม้อแปลงพัลส์
Triol AC15 มีสวิตช์ไทริสเตอร์สามตัวที่อธิบายข้างต้นตามจำนวนเฟสกำลัง โดยการเปลี่ยนมุมของการควบคุม (เปิด) ของไทริสเตอร์ทำให้สามารถควบคุมแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์และตามกระแสได้ การลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์ช่วยให้คุณลดกระแสในโหมดไดนามิก (ระหว่างการสตาร์ทเครื่อง) และหลีกเลี่ยงแรงกระแทกที่กลไก การมีอยู่ของตัวควบคุมกระแสไฟช่วยให้มั่นใจได้ว่าค่าปัจจุบันที่ตั้งไว้จะคงอยู่ในช่วงเวลาเร่งความเร็วเกือบทั้งหมดโดยการเพิ่มแรงดันไฟฟ้าที่เอาต์พุตของ TC ทำได้โดยการลดมุมควบคุมของไทริสเตอร์ การเร่งด้วยค่าที่กำหนดของกระแสเริ่มต้นจะดำเนินต่อไปจนกว่าค่าปัจจุบันของมุมควบคุมไทริสเตอร์จะมากกว่ามุมการเปลี่ยนระหว่างแรงดันแรกกับฮาร์โมนิกของกระแส เมื่อไม่เป็นไปตามอัตราส่วนนี้ ซึ่งเป็นกรณีที่สิ้นสุดการเริ่มต้น ไทริสเตอร์จะเปิดออกโดยสมบูรณ์ อย่างไรก็ตาม ณ จุดนี้กระแสไม่ควรเกินค่าที่ตั้งไว้อีกต่อไปโดยกำหนดค่าพารามิเตอร์เริ่มต้นอย่างถูกต้อง
โดยการเปลี่ยนค่าเกนและค่าคงที่การรวมของคอนโทรลเลอร์ปัจจุบัน เช่นเดียวกับค่าเริ่มต้นของมุมเปิดของไทริสเตอร์และขนาด (หลายหลาก) ของกระแสเริ่มต้น คุณสามารถรับคุณสมบัติไดนามิกที่ต้องการได้ ควรสังเกตว่าค่าของกระแสเริ่มต้นไม่ควรเกินค่าที่ระบุของกระแสที่ระบุในหนังสือเดินทางของอุปกรณ์เริ่มต้นโดยเฉพาะ ใน Triol AC15 ที่โหลดต่ำกว่าค่าเล็กน้อยอย่างมีนัยสำคัญ จะมีโหมดประหยัดพลังงานให้ ซึ่งเนื่องจากการเปลี่ยนแปลงในมุมควบคุมไทริสเตอร์ ไดรฟ์จึงทำงานด้วยแรงดันไฟฟ้าที่ลดลง สตาร์ทเตอร์สามารถเบรกมอเตอร์ได้:
หมดแรงโดยการเอาพัลส์ควบคุมออกจากไทริสเตอร์ TC;
ความลาดชันโดยการลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้า (เพิ่มขึ้นอย่างราบรื่นในมุมควบคุมของไทริสเตอร์ TK)
การเบรกแบบไดนามิก โดยการจ่ายแรงดันคงที่ในทิศทางไปยังขดลวดสเตเตอร์ของมอเตอร์
เซ็นเซอร์กระแส DT1, DT2 บนหม้อแปลงกระแสในช่องจ่ายไฟ AC15 ใช้เพื่อควบคุม ควบคุม และวัดกระแสสตาร์ทหรือกระแสโหลดของมอเตอร์ไฟฟ้า สำหรับป้องกันการโอเวอร์โหลดและไฟฟ้าลัดวงจร
เซ็นเซอร์แรงดันไฟฟ้า DN1 และ DN2 บนหม้อแปลงไฟฟ้าแรงสูงทำหน้าที่ซิงโครไนซ์ระบบควบคุมกับเครือข่ายแหล่งจ่ายไฟควบคุมการมีอยู่ของแรงดันไฟฟ้าทุกเฟสและความถูกต้องของการสลับกัน
SP แหล่งจ่ายไฟแบบหลายช่องสัญญาณจะแปลงแรงดันไฟฟ้ากระแสสลับหลักที่ 380 V ให้เป็นระบบแรงดันไฟฟ้ากระแสตรงในระดับที่ต้องการและระดับความเสถียร เชื่อมต่อด้วยไฟฟ้าและไม่เชื่อมต่อถึงกัน เป็นอุปกรณ์ควบคุมกำลังไฟฟ้า
ตัวควบคุมไมโครโปรเซสเซอร์ MK สร้างโหมดการทำงานของอุปกรณ์ด้วยพารามิเตอร์ที่ระบุโดยใช้สัญญาณควบคุม: สัญญาณควบคุมไทริสเตอร์, การป้องกัน AC15 และสัญญาณการปิดฉุกเฉิน, การรับและส่งสัญญาณ
ให้สัญญาณควบคุม การตั้งค่า และข้อมูลภายนอก
อุปกรณ์ I/O I/O มีไว้สำหรับรับและส่งสัญญาณควบคุมภายนอก
UVV มีชุดอินพุตและเอาต์พุตแบบไม่ต่อเนื่อง อุปกรณ์ดีคัปปลิ้งแบบกัลวานิกสำหรับการแยกที่อาจเกิดขึ้นจากวงจรควบคุมภายนอกจะรวมอยู่ในวงจรอินพุตและเอาต์พุตของยูนิตพ่นลม ตัวปรับรูปร่างพัลส์ FI (ไดรเวอร์) ได้รับการออกแบบเพื่อสร้างระดับสัญญาณควบคุมของไทริสเตอร์ที่ต้องการ การแยกวงจรไฟฟ้าแบบกัลวานิก และวงจรควบคุมของไทริสเตอร์และ MK อุปกรณ์นี้มี PU แผงควบคุมในตัวซึ่งมีแป้นพิมพ์สำหรับควบคุมโหมดการทำงาน การตั้งค่าและพารามิเตอร์การเขียนโปรแกรม ตลอดจนองค์ประกอบบ่งชี้และสัญญาณสำหรับการแสดงค่า PA
พารามิเตอร์และการวินิจฉัย ตามข้อตกลงกับลูกค้า ชุดการส่งมอบอาจรวมถึงรีโมทคอนโทรล (RC) ซึ่งฟังก์ชันดังกล่าวจะคล้ายกับของรีโมตคอนโทรล
เพื่อความสะดวกของผู้ปฏิบัติงาน พารามิเตอร์ที่ตั้งโปรแกรมได้และข้อมูลของอุปกรณ์ได้สรุปไว้ใน กลุ่มงาน. เพิ่มเติมในข้อความของลิงค์และพารามิเตอร์ที่เกี่ยวข้องจะได้รับในรูปแบบ [ХХ YY]
โดยที่ XX - หมายเลขกลุ่ม, YY - หมายเลขพารามิเตอร์
ด้านล่างในรูป 1.2 ... มะเดื่อ 1.4 แสดงการดำเนินการตามขั้นตอนทางเทคโนโลยีแต่ละรายการในระหว่างการสตาร์ทและดับเครื่องยนต์ตามลำดับ
ลิงค์และแต่ละลิงค์ - สองอันรวมไทริสเตอร์แบบแบ็คทูแบ็ค เพื่อปรับแรงดันไฟฟ้าให้เท่ากันระหว่างไทริสเตอร์ที่เชื่อมต่อแบบอนุกรมใน
ในโหมดสแตติกและไดนามิก วงจรตัวต้านทานและตัวต้านทาน-ตัวเก็บประจุจะเชื่อมต่อแบบขนานกับแต่ละลิงก์ เช่นเดียวกับเซ็นเซอร์สถานะไทริสเตอร์ ข้อมูลเกี่ยวกับสถานะของไทริสเตอร์จะถูกส่งไปยังระบบควบคุมผ่านสายไฟเบอร์ออปติก ไทริสเตอร์หลักแต่ละตัวมีการประกอบบอร์ดพัลส์หม้อแปลงของตัวเอง เพื่อลดการแพร่กระจายในช่วงเวลาเปิดเครื่องของไทริสเตอร์ที่เชื่อมต่อแบบอนุกรม ขดลวดปฐมภูมิของหม้อแปลงพัลส์จะเชื่อมต่อแบบอนุกรม การแยกที่เป็นไปได้ระหว่างส่วนไฟฟ้าแรงสูงกับระบบควบคุมแรงดันต่ำนั้นดำเนินการโดยใช้สายเคเบิลใยแก้วนำแสงและหม้อแปลงพัลส์ Triol AC15 มีสวิตช์ไทริสเตอร์สามตัวที่อธิบายข้างต้นตามจำนวนเฟสกำลัง โดยการเปลี่ยนมุมของการควบคุม (เปิด) ของไทริสเตอร์ทำให้สามารถควบคุมแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์และตามกระแสได้ การลดแรงดันไฟฟ้าที่จ่ายให้กับขดลวดสเตเตอร์ของมอเตอร์ทำให้สามารถลดกระแสในโหมดไดนามิก (เมื่อสตาร์ทเครื่อง) และหลีกเลี่ยงแรงกระแทกที่กลไกได้ การมีอยู่ของตัวควบคุมกระแสไฟช่วยให้มั่นใจได้ว่าค่าปัจจุบันที่ตั้งไว้จะคงอยู่ในช่วงเวลาเร่งความเร็วเกือบทั้งหมดโดยการเพิ่มแรงดันไฟฟ้าที่เอาต์พุตของ TC ทำได้โดยการลดมุมควบคุมของไทริสเตอร์ การเร่งด้วยค่าที่กำหนดของกระแสเริ่มต้นจะดำเนินต่อไปจนกว่าค่าปัจจุบันของมุมควบคุมไทริสเตอร์จะมากกว่ามุมการเปลี่ยนระหว่างแรงดันแรกกับฮาร์โมนิกของกระแส เมื่อไม่เป็นไปตามอัตราส่วนนี้ ซึ่งเป็นกรณีที่สิ้นสุดการเริ่มต้น ไทริสเตอร์จะเปิดออกโดยสมบูรณ์ อย่างไรก็ตาม ณ จุดนี้กระแสไม่ควรเกินค่าที่ตั้งไว้อีกต่อไปโดยกำหนดค่าพารามิเตอร์เริ่มต้นอย่างถูกต้อง
ปัจจุบัน มอเตอร์แบบอะซิงโครนัสสามเฟสที่มีโรเตอร์กรงกระรอกเป็นส่วนใหญ่ การสตาร์ทและหยุดมอเตอร์ดังกล่าวเมื่อเปิดสวิตช์เป็นแรงดันไฟหลักเต็มจะดำเนินการจากระยะไกลโดยใช้สตาร์ทเตอร์แบบแม่เหล็ก
วงจรที่ใช้บ่อยที่สุดคือสตาร์ทเตอร์หนึ่งตัวและ "สตาร์ท" และ "หยุด" เพื่อให้แน่ใจว่าการหมุนของเพลามอเตอร์ทั้งสองทิศทาง วงจรที่มีตัวสตาร์ทสองตัว (หรือสตาร์ทแบบถอยหลัง) และปุ่มสามปุ่ม รูปแบบนี้ช่วยให้คุณเปลี่ยนทิศทางการหมุนของเพลามอเตอร์ "ขณะเดินทาง" โดยไม่ต้องหยุดก่อน
โครงร่างการสตาร์ทเครื่องยนต์
มอเตอร์ไฟฟ้า M ขับเคลื่อนโดย เครือข่ายสามเฟส แรงดันไฟฟ้ากระแสสลับ. เซอร์กิตเบรกเกอร์สามเฟส QF ออกแบบมาเพื่อตัดการเชื่อมต่อวงจรในกรณีที่ไฟฟ้าลัดวงจร เซอร์กิตเบรกเกอร์เฟสเดียว SF ปกป้องวงจรควบคุม
องค์ประกอบหลักของสตาร์ทแม่เหล็กคือคอนแทคเตอร์ (รีเลย์อันทรงพลังสำหรับการสลับกระแสสูง) KM หน้าสัมผัสกำลังของสวิตช์สามเฟสเหมาะสำหรับมอเตอร์ไฟฟ้า ปุ่ม SB1 ("Start") ออกแบบมาเพื่อสตาร์ทเครื่องยนต์ และปุ่ม SB2 ("Stop") - เพื่อหยุด รีเลย์ไบเมทัลลิกความร้อน KK1 และ KK2 จะปิดวงจรเมื่อกระแสไฟที่มอเตอร์ไฟฟ้าใช้เกิน
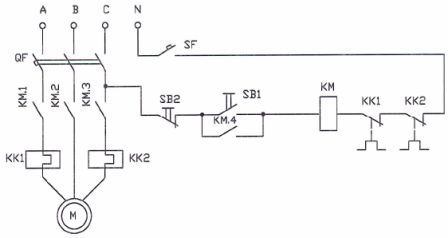
ข้าว. 1. แบบแผนของการสตาร์ทมอเตอร์แบบอะซิงโครนัสสามเฟสโดยใช้สตาร์ทเตอร์แบบแม่เหล็ก
เมื่อกดปุ่ม SB1 คอนแทคเตอร์ KM จะเปิดใช้งานและหน้าสัมผัส KM.1, KM.2, KM.3 จะเชื่อมต่อมอเตอร์ไฟฟ้าเข้ากับเครือข่าย และหน้าสัมผัส KM.4 จะบล็อกปุ่ม (ล็อคตัวเอง)
หากต้องการหยุดมอเตอร์ เพียงกดปุ่ม SB2 ในขณะที่คอนแทค KM จะปลดและปิดมอเตอร์
คุณสมบัติที่สำคัญของสตาร์ทเตอร์แบบแม่เหล็กคือในกรณีที่ไฟฟ้าดับโดยไม่ได้ตั้งใจในเครือข่าย เครื่องยนต์จะปิด แต่การคืนค่าแรงดันไฟฟ้าในเครือข่ายจะไม่ทำให้เครื่องยนต์สตาร์ทได้เอง เนื่องจากเมื่อแรงดันไฟฟ้าอยู่ที่ ปิด KM คอนแทคจะปล่อย และหากต้องการเปิดใช้งานอีกครั้ง คุณต้องกดปุ่ม SB1
ในกรณีที่เครื่องทำงานผิดปกติ เช่น เมื่อโรเตอร์มอเตอร์ติดขัดและหยุดทำงาน กระแสไฟที่มอเตอร์ใช้จะเพิ่มขึ้นหลายครั้ง ซึ่งนำไปสู่การทำงานของรีเลย์ระบายความร้อน การเปิดหน้าสัมผัส KK1 KK2 และการปิดเครื่อง . การส่งคืนผู้ติดต่อ KK สู่สถานะปิดจะดำเนินการด้วยตนเองหลังจากกำจัดข้อบกพร่องแล้ว
สตาร์ทแม่เหล็กแบบถอยหลังช่วยให้คุณไม่เพียงสตาร์ทและหยุดเท่านั้น เครื่องยนต์ไฟฟ้าแต่เปลี่ยนทิศทางการหมุนของโรเตอร์ สำหรับสิ่งนี้ วงจรสตาร์ท (รูปที่ 2) ประกอบด้วยคอนแทคเตอร์และปุ่มสตาร์ทสองชุด
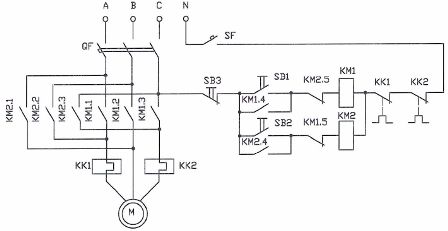
ข้าว. 2. โครงการสตาร์ทเครื่องยนต์โดยใช้สตาร์ทแม่เหล็กแบบถอยหลัง
คอนแทคเตอร์ KM1 และปุ่ม SB1 พร้อมระบบล็อคตัวเองออกแบบมาเพื่อสตาร์ทเครื่องยนต์ในโหมด "เดินหน้า" และคอนแทคเตอร์ KM2 และปุ่ม SB2 จะเปิดโหมด "ย้อนกลับ" การเปลี่ยนทิศทางการหมุนของโรเตอร์ มอเตอร์สามเฟสก็เพียงพอแล้วที่จะสลับแรงดันไฟฟ้าสองในสามเฟสซึ่งจัดทำโดยหน้าสัมผัสหลักของคอนแทคเตอร์
ปุ่ม SB3 ออกแบบมาเพื่อหยุดเครื่องยนต์ ระบบอินเตอร์ล็อคหน้าสัมผัส KM 1.5 และ KM2.5 และรีเลย์ความร้อน KK1 และ KK2 ให้การป้องกันกระแสไฟเกิน
การเปิดมอเตอร์ที่แรงดันไฟหลักเต็มจะมาพร้อมกับกระแสเริ่มต้นขนาดใหญ่ ซึ่งอาจไม่สามารถยอมรับได้สำหรับเครือข่ายที่มีกำลังไฟจำกัด
วงจรเริ่มต้นของมอเตอร์ไฟฟ้าที่มีข้อจำกัดกระแสไฟเริ่มต้น (รูปที่ 3) ประกอบด้วยตัวต้านทาน R1, R2, R3 ที่เชื่อมต่อแบบอนุกรมกับขดลวดของมอเตอร์ ตัวต้านทานเหล่านี้จะจำกัดกระแสในขณะที่สตาร์ทเมื่อคอนแทค KM เปิดใช้งานหลังจากกดปุ่ม SB1 พร้อมกับ KM เมื่อปิดการติดต่อ KM.5 การถ่ายทอดเวลา KT จะเปิดใช้งาน
การหน่วงเวลาโดยรีเลย์เวลาจะต้องเพียงพอที่จะเร่งความเร็วของมอเตอร์ได้ เมื่อสิ้นสุดเวลาเปิดรับแสง หน้าสัมผัส KT จะปิดลง รีเลย์ K จะเปิดใช้งาน และด้วยหน้าสัมผัส K.1, K.2, K.3 จะแบ่งตัวต้านทานเริ่มต้น กระบวนการเริ่มต้นเสร็จสมบูรณ์และมอเตอร์มีแรงดันไฟฟ้าเต็ม
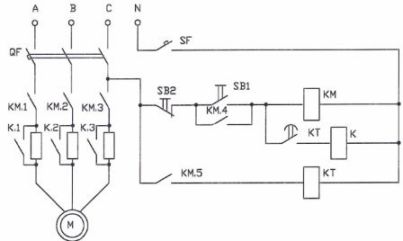
ข้าว. 3. แบบแผนของการสตาร์ทเครื่องยนต์ด้วยข้อ จำกัด กระแสสตาร์ท
ถัดไป จะพิจารณารูปแบบการเบรกที่ได้รับความนิยมสูงสุดสองแบบสำหรับมอเตอร์แบบอะซิงโครนัสสามเฟสที่มีโรเตอร์แบบกรงกระรอก: รูปแบบการเบรกแบบไดนามิกและรูปแบบการเบรกแบบทวนกระแส
วงจรเบรกของเครื่องยนต์
หลังจากถอดแรงดันไฟฟ้าออกจากเครื่องยนต์แล้ว โรเตอร์จะยังคงหมุนต่อไปเป็นระยะเวลาหนึ่งเนื่องจากความเฉื่อย ในอุปกรณ์จำนวนหนึ่ง เช่น ในกลไกการยกและการขนส่ง จำเป็นต้องมีการเบรกแบบบังคับเพื่อลดการบุกรุก การเบรกแบบไดนามิกประกอบด้วยความจริงที่ว่าหลังจากถอดแรงดันไฟฟ้าสลับผ่านขดลวดของมอเตอร์ กระแสตรง..
โครงร่างของการเบรกแบบไดนามิกแสดงในรูปที่ สี่.
ข้าว. 4. แบบแผนของการเบรกแบบไดนามิกของเครื่องยนต์
ในวงจรนอกเหนือจากคอนแทคหลัก KM แล้วยังมีรีเลย์ K ซึ่งรวมถึงโหมดเบรกด้วย เนื่องจากรีเลย์และคอนแทคเตอร์ไม่สามารถเปิดพร้อมกันได้จึงใช้รูปแบบการเชื่อมต่อกัน (หน้าสัมผัส KM.5 และ K.3)
เมื่อกดปุ่ม SB1 คอนแทค KM จะเปิดใช้งาน จ่ายกำลังให้กับเครื่องยนต์ (หน้าสัมผัส KM.1 KM.2, KM.3) ปิดกั้นปุ่ม (KM.4) และบล็อกรีเลย์ K (KM.5) . การปิด KM.6 จะทริกเกอร์การถ่ายทอดเวลา KT และปิดหน้าสัมผัส KT โดยไม่ชักช้า เครื่องยนต์จึงสตาร์ท
หากต้องการดับเครื่องยนต์ ให้กดปุ่ม SB2 คอนแทค KM ปล่อย, หน้าสัมผัส KM.1 - KM.3 เปิด, ดับเครื่องยนต์, ปิดหน้าสัมผัส KM.5 ซึ่งทริกเกอร์รีเลย์ K. หน้าสัมผัส K.1 และ K.2 ปิดโดยจ่ายกระแสตรงไปยังขดลวด เกิดการชะลอตัวอย่างรวดเร็ว
เมื่อหน้าสัมผัส KM.6 เปิดขึ้น CT รีเลย์เวลาจะปล่อย การหน่วงเวลาจะเริ่มขึ้น ความเร็วชัตเตอร์ต้องเพียงพอที่จะหยุดมอเตอร์ได้อย่างสมบูรณ์ เมื่อสิ้นสุดการหน่วงเวลา ผู้ติดต่อ KT จะเปิดขึ้น รีเลย์ K จะปล่อยและถอดออก ความดันคงที่จากขดลวดของมอเตอร์
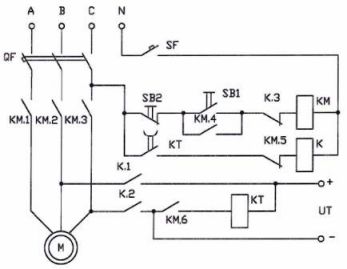
ที่สุด วิธีที่มีประสิทธิภาพการเบรกเป็นการพลิกกลับของมอเตอร์ เมื่อ ทันทีหลังจากถอดไฟ แรงดันไฟฟ้าถูกนำไปใช้กับมอเตอร์ไฟฟ้า ทำให้เกิดแรงบิดที่เคาน์เตอร์ โครงร่างของการเบรกโดยการเดินสายไฟแสดงในรูปที่ 5.
ข้าว. 5. รูปแบบการเบรกของเครื่องยนต์โดยการรวมเคาน์เตอร์
ความเร็วโรเตอร์ของมอเตอร์ถูกควบคุมโดยรีเลย์ความเร็วพร้อมหน้าสัมผัส SR ถ้าความเร็วมากกว่าค่าที่กำหนด ติดต่อ SR จะปิด เมื่อดับเครื่องยนต์ หน้าสัมผัส SR จะเปิดขึ้น นอกจากคอนแทคเตอร์โดยตรง KM1 แล้ว วงจรยังมีคอนแทคเตอร์ถอยหลัง KM2
เมื่อสตาร์ทเครื่องยนต์ คอนแทคเตอร์ KM1 จะทำงานและหน้าสัมผัส KM 1.5 จะทำลายวงจรคอยล์ KM2 เมื่อถึงความเร็วที่กำหนด หน้าสัมผัส SR จะปิดลง เตรียมวงจรเพื่อเปิดการย้อนกลับ
เมื่อดับเครื่องยนต์ คอนแทคเตอร์ KM1 จะปลดและปิดหน้าสัมผัส KM1.5 ด้วยเหตุนี้คอนแทคเตอร์ KM2 จึงถูกเปิดใช้งานและจ่ายแรงดันย้อนกลับสำหรับการเบรกให้กับมอเตอร์ไฟฟ้า ความเร็วโรเตอร์ที่ลดลงทำให้ SR เปิด คอนแทคเตอร์ KM2 ปล่อย เบรกหยุด
บทความนี้พิจารณารูปแบบการเริ่มต้นของมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกโดยใช้ตัวสตาร์ทแบบแม่เหล็กแบบไม่ถอยหลังและถอยหลัง
มอเตอร์เหนี่ยวนำแบบกรงกระรอกสามารถควบคุมได้โดยใช้ตัวสตาร์ทแบบแม่เหล็กหรือคอนแทคเตอร์ เมื่อใช้มอเตอร์กำลังต่ำซึ่งไม่ต้องการการจำกัดกระแสเริ่มต้น การสตาร์ทจะดำเนินการโดยเปิดสวิตช์ให้เป็นแรงดันไฟฟ้าเต็มของเครือข่าย วงจรที่ง่ายที่สุดการควบคุมเครื่องยนต์จะแสดงในรูปที่ หนึ่ง.
ข้าว. 1. รูปแบบการควบคุม มอเตอร์แบบอะซิงโครนัสพร้อมโรเตอร์กรงกระรอกพร้อมสตาร์ทแม่เหล็กแบบไม่ย้อนกลับ
ในการเริ่มต้น เบรกเกอร์ QF จะเปิดขึ้นและทำให้วงจรไฟฟ้าของวงจรและวงจรควบคุมได้รับพลังงาน เมื่อกดปุ่ม "Start" ของ SB1 วงจรไฟฟ้าของคอยล์ของคอนแทค KM จะถูกปิดซึ่งเป็นผลมาจากการที่หน้าสัมผัสหลักในวงจรไฟฟ้าถูกปิดด้วยการเชื่อมต่อสเตเตอร์ของมอเตอร์ไฟฟ้า M กับแหล่งจ่ายไฟหลัก . ในเวลาเดียวกัน KM หน้าสัมผัสการปิดกั้นจะปิดในวงจรควบคุม ซึ่งจะสร้างวงจรจ่ายไฟสำหรับคอยล์ KM (โดยไม่คำนึงถึงตำแหน่งของหน้าสัมผัสปุ่ม) มอเตอร์ปิดโดยกดปุ่ม "หยุด" SB2 ในกรณีนี้วงจรจ่ายไฟของคอนแทค KM ถูกขัดจังหวะซึ่งนำไปสู่การเปิดหน้าสัมผัสทั้งหมดเครื่องยนต์ถูกตัดการเชื่อมต่อจากเครือข่ายหลังจากนั้นจำเป็นต้องปิดเบรกเกอร์ QF
โครงการนี้มีการป้องกันประเภทต่อไปนี้:
จาก ไฟฟ้าลัดวงจร- พร้อมเซอร์กิตเบรกเกอร์ QF และฟิวส์ FU
จากการโอเวอร์โหลดของมอเตอร์ไฟฟ้า - ด้วยความช่วยเหลือของรีเลย์ความร้อน KK (การเปิดหน้าสัมผัสของรีเลย์เหล่านี้เมื่อโอเวอร์โหลดให้เปิดวงจรไฟฟ้าของคอนแทค KM ซึ่งจะเป็นการถอดเครื่องยนต์ออกจากเครือข่าย)
การป้องกันเป็นศูนย์ - ใช้คอนแทค KM (เมื่อแรงดันไฟฟ้าลดลงหรือหายไป คอนแทค KM จะสูญเสียพลังงาน เปิดหน้าสัมผัสและเครื่องยนต์ถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลัก)
ในการเปิดเครื่องคุณต้องกดปุ่ม SB1 "Start" อีกครั้ง หากไม่สามารถสตาร์ทมอเตอร์ได้โดยตรงและจำเป็นต้องจำกัดกระแสเริ่มต้นของอะซิงโครนัส มอเตอร์กรงกระรอก, สมัครเริ่มต้นเมื่อ สวนท่ง. ในการทำเช่นนี้ ความต้านทานแบบแอคทีฟหรือเครื่องปฏิกรณ์จะรวมอยู่ในวงจรสเตเตอร์ หรือใช้การสตาร์ทผ่านตัวเปลี่ยนรูปแบบอัตโนมัติ 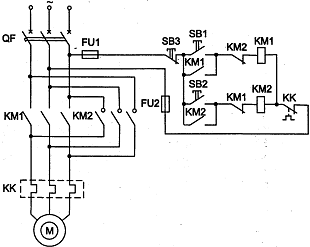
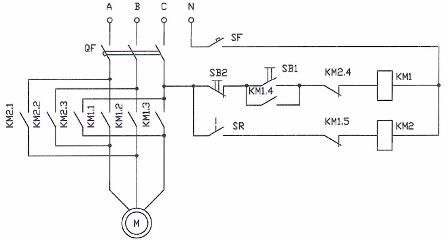
ข้าว. 2 แผนการควบคุมมอเตอร์แบบอะซิงโครนัสพร้อมโรเตอร์กรงกระรอกพร้อมสตาร์ทเตอร์แม่เหล็กแบบพลิกกลับได้
ในรูป 2 แสดงวงจรควบคุมของมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์แบบกรงกระรอกพร้อมสตาร์ทเตอร์แม่เหล็กแบบย้อนกลับได้ วงจรนี้อนุญาตให้สตาร์ทมอเตอร์กรงกระรอกแบบอะซิงโครนัสโดยตรง รวมทั้งเปลี่ยนทิศทางการหมุนของมอเตอร์ เช่น ทำให้เกิดการย้อนกลับ เครื่องยนต์เริ่มต้นด้วยการเปิดเบรกเกอร์ QF และกดปุ่ม SB1 ซึ่งเป็นผลมาจากการที่คอนแทคเตอร์ KM1 ได้รับพลังงาน ปิดหน้าสัมผัสกำลังและมอเตอร์สเตเตอร์เชื่อมต่อกับเครือข่าย หากต้องการย้อนกลับเครื่องยนต์ ให้กดปุ่ม SB3 การดำเนินการนี้จะปิดคอนแทคเตอร์ KM1 หลังจากที่กดปุ่ม SB2 และคอนแทคเตอร์ KM2 จะเปิดขึ้น
ดังนั้นมอเตอร์จึงเชื่อมต่อกับเครือข่ายโดยมีการเปลี่ยนแปลงลำดับเฟสซึ่งนำไปสู่การเปลี่ยนแปลงทิศทางการหมุน วงจรนี้ใช้การบล็อกจากการเปิดใช้งานคอนแทคเตอร์ KM2 และ KM1 ที่ผิดพลาดพร้อมกันได้โดยใช้หน้าสัมผัสเบรกเกอร์ KM2, KM1 เครื่องยนต์ถูกตัดการเชื่อมต่อจากเครือข่ายโดยปุ่ม SB2 และเบรกเกอร์ QF วงจรนี้มีการป้องกันมอเตอร์ทุกประเภท โดยพิจารณาในวงจรควบคุมของมอเตอร์แบบอะซิงโครนัสที่มีสตาร์ทเตอร์แม่เหล็กแบบเปลี่ยนกลับไม่ได้