§ 92. แรงบิด มอเตอร์เหนี่ยวนำ
แรงบิดของมอเตอร์เหนี่ยวนำเกิดจากการทำงานร่วมกันของการหมุน สนามแม่เหล็กสเตเตอร์ที่มีกระแสในตัวนำของขดลวดโรเตอร์ ดังนั้นแรงบิดจึงขึ้นอยู่กับทั้งฟลักซ์แม่เหล็กของสเตเตอร์ Φ และความแรงของกระแสในขดลวดของโรเตอร์ ฉัน 2. อย่างไรก็ตามเท่านั้น พลังงานที่ใช้งานอยู่ใช้โดยเครื่องจากเครือข่าย เป็นผลให้แรงบิดไม่ขึ้นอยู่กับความแรงของกระแสในขดลวดของโรเตอร์ ฉัน 2 แต่จากส่วนประกอบที่ใช้งานอยู่เท่านั้น เช่น ฉัน 2 cos φ 2 โดยที่ φ 2 - มุมเฟสระหว่าง e d.s. และกระแสในขดลวดโรเตอร์
ดังนั้น แรงบิดของมอเตอร์เหนี่ยวนำถูกกำหนดโดยนิพจน์ต่อไปนี้:
M=CΦ ฉันφ 2 คอส φ 2 , (122)
ที่ไหน กับ- สร้างสรรค์ ค่าคงที่ของเครื่องขึ้นอยู่กับจำนวนเสาและเฟสจำนวนรอบของขดลวดสเตเตอร์การออกแบบขดลวดและระบบหน่วยที่นำมาใช้
สมมติว่าแรงดันไฟฟ้าที่ใช้คงที่และการเปลี่ยนแปลงของโหลดมอเตอร์ ฟลักซ์แม่เหล็กจะยังคงเกือบคงที่
ดังนั้นในนิพจน์สำหรับแรงบิด ปริมาณ กับและ Φ เป็นค่าคงที่และแรงบิดเป็นสัดส่วนเฉพาะกับส่วนประกอบที่ใช้งานของกระแสในขดลวดของโรเตอร์ เช่น
ม ~ ฉัน 2 คอส φ 2 . (123)
การเปลี่ยนภาระหรือแรงบิดในการเบรกบนเพลามอเตอร์ อย่างที่ทราบกันดีอยู่แล้ว จะเปลี่ยนทั้งความเร็วของโรเตอร์และสลิป
การเปลี่ยนแปลงของสลิปทำให้เกิดการเปลี่ยนแปลงทั้งความแรงของกระแสในโรเตอร์ ฉัน 2 และส่วนประกอบที่ใช้งานอยู่ ฉัน 2 คอส φ 2 .
เป็นไปได้ที่จะกำหนดความแรงของกระแสในโรเตอร์ด้วยอัตราส่วน e d.s. ต่อความต้านทานทั้งหมด เช่น ตามกฎของโอห์ม
ที่ไหน Z 2 , ร 2 และ x 2 - ความต้านทานทั้งหมดที่ใช้งานและปฏิกิริยาของเฟสของขดลวดโรเตอร์
อี 2 - อี d.s. ขั้นตอนที่คดเคี้ยวของโรเตอร์หมุน
การเปลี่ยนแปลงของสลิปจะเปลี่ยนความถี่ของกระแสโรเตอร์ ด้วยโรเตอร์นิ่ง ( น 2 = 0 และ ส= 1) สนามหมุนที่ความเร็วเดียวกันตัดผ่านตัวนำของขดลวดสเตเตอร์และโรเตอร์ และความถี่ของกระแสในโรเตอร์จะเท่ากับความถี่ของกระแสหลัก ( ฉ 2 = ฉ 1). เมื่อสลิปลดลง ขดลวดของโรเตอร์จะถูกข้ามโดยสนามแม่เหล็กที่มีความถี่ต่ำกว่า ซึ่งเป็นผลมาจากความถี่ของกระแสในโรเตอร์ลดลง เมื่อโรเตอร์หมุนพร้อมกันกับสนาม ( น 2 = น 1 และ ส= 0) ตัวนำของขดลวดโรเตอร์ไม่ถูกสนามแม่เหล็กตัดผ่าน ดังนั้นความถี่ของกระแสในโรเตอร์จึงเป็นศูนย์ ( ฉ 2 = 0). ดังนั้นความถี่ของกระแสในขดลวดของโรเตอร์จึงแปรผันตามสลิป เช่น
ฉ 2 = เอส เอฟ 1 .
ความต้านทานที่ใช้งานของขดลวดโรเตอร์นั้นแทบไม่ขึ้นกับความถี่ ในขณะที่ e d.s. และรีแอกแตนซ์เป็นสัดส่วนกับความถี่ เช่น พวกมันเปลี่ยนด้วยสลิปและสามารถกำหนดได้ด้วยนิพจน์ต่อไปนี้:
อี 2 = เอส อีและ เอ็กซ์ 2 = เอส เอ็กซ์,
ที่ไหน อีและ เอ็กซ์- อี d.s. และรีแอกแตนซ์แบบเหนี่ยวนำของเฟสที่คดเคี้ยวสำหรับโรเตอร์คงที่ ตามลำดับ
ดังนั้นเราจึงมี:
และแรงบิด
ดังนั้นสำหรับสลิปขนาดเล็ก (มากถึงประมาณ 20%) เมื่อรีแอกแตนซ์ เอ็กซ์ 2 = เอส เอ็กซ์เล็กน้อยเมื่อเทียบกับการใช้งาน ร 2 , การเพิ่มขึ้นของสลิปทำให้แรงบิดเพิ่มขึ้น เนื่องจากสิ่งนี้จะเพิ่มส่วนประกอบที่ใช้งานของกระแสในโรเตอร์ ( ฉัน 2 คอส φ 2). สำหรับสลิปขนาดใหญ่ ( เอส เอ็กซ์มากกว่า ร 2) สลิปที่เพิ่มขึ้นจะทำให้แรงบิดลดลง
ดังนั้นเมื่อสลิปเพิ่มขึ้น (มีค่ามาก) แม้ว่าความแรงของกระแสในโรเตอร์จะเพิ่มขึ้น ฉัน 2 แต่องค์ประกอบที่ใช้งานอยู่ ฉัน 2 cos φ 2 และดังนั้น แรงบิดจึงลดลงเนื่องจากการเพิ่มขึ้นอย่างมาก ปฏิกิริยาขดลวดโรเตอร์
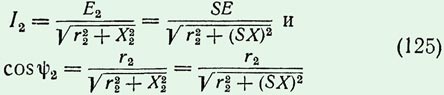
บนมะเดื่อ 115 แสดงความสัมพันธ์ระหว่างแรงบิดและสลิป ด้วยสลิปบางอย่าง ส ม(ประมาณ 12 - 20%) มอเตอร์พัฒนาแรงบิดสูงสุด ซึ่งกำหนดความจุเกินพิกัดของมอเตอร์ และมักจะสูงกว่าแรงบิดที่กำหนด 2 - 3 เท่า
การทำงานที่เสถียรของเครื่องยนต์ทำได้เฉพาะบนเส้นโค้งทอร์กสลิปจากน้อยไปมาก เช่น เมื่อสลิปแปรผันจาก 0 ถึง ส ม. การทำงานของเครื่องยนต์ในสาขาด้านล่างของเส้นโค้งที่ระบุ เช่น เมื่อเลื่อน ส > ส มเป็นไปไม่ได้เนื่องจากไม่มีความสมดุลที่มั่นคงของช่วงเวลาที่แน่นอน
สมมติว่าแรงบิดเท่ากับเบรก ( มวีอาร์ = ม torm) ที่จุด กและ ขจากนั้นในกรณีที่มีการละเมิดสมดุลของช่วงเวลาโดยไม่ตั้งใจในกรณีหนึ่งจะได้รับการคืนค่าและอีกกรณีหนึ่งจะไม่ได้รับการกู้คืน
สมมติว่าแรงบิดของมอเตอร์ลดลงด้วยเหตุผลบางอย่าง (เช่น เมื่อแรงดันไฟหลักลดลง) สลิปจะเริ่มเพิ่มขึ้น หากจุดสมดุลของช่วงเวลาอยู่ที่จุดนั้น กจากนั้นการลื่นไถลที่เพิ่มขึ้นจะทำให้แรงบิดของเครื่องยนต์เพิ่มขึ้นและจะเท่ากับแรงบิดในการเบรกอีกครั้ง กล่าวคือ ความสมดุลของช่วงเวลาจะกลับคืนมาพร้อมกับการลื่นไถลที่เพิ่มขึ้น หากจุดสมดุลของช่วงเวลาอยู่ที่จุดนั้น ขจากนั้นการลื่นไถลที่เพิ่มขึ้นจะทำให้แรงบิดลดลง ซึ่งจะยังคงน้อยกว่าแรงบิดในการเบรกเสมอ นั่นคือ สมดุลของช่วงเวลาจะไม่ถูกเรียกคืน และความเร็วของโรเตอร์จะลดลงอย่างต่อเนื่องจนกว่าเครื่องยนต์จะหยุดสนิท
ดังนั้น ณ จุดๆ กเครื่องจะทำงานได้อย่างเสถียรและตรงจุด ขไม่สามารถดำเนินการได้อย่างยั่งยืน
หากใช้แรงบิดในการเบรกที่เพลามอเตอร์มากกว่าค่าสูงสุด ความสมดุลของแรงบิดจะไม่ถูกเรียกคืนและโรเตอร์ของมอเตอร์จะหยุดทำงาน
แรงบิดของมอเตอร์เป็นสัดส่วนกับกำลังสองของแรงดันไฟฟ้าที่ใช้ เนื่องจากทั้งฟลักซ์แม่เหล็กและกระแสในโรเตอร์เป็นสัดส่วนกับแรงดันไฟฟ้า ดังนั้นการเปลี่ยนแปลงของแรงดันไฟฟ้าในเครือข่ายทำให้เกิดการเปลี่ยนแปลงของแรงบิด
ความยาวและระยะทาง มวล การวัดปริมาตรของผลิตภัณฑ์เทกองและอาหาร พื้นที่ ปริมาตรและหน่วยการวัดในสูตรอาหาร อุณหภูมิ ความดัน ความเค้นเชิงกล โมดูลัสของ Young พลังงานและกำลังงาน แรง เวลา ความเร็วของสายมุมเรียบ ประสิทธิภาพความร้อนและประสิทธิภาพการใช้เชื้อเพลิง ตัวเลข หน่วยวัดของปริมาณข้อมูล อัตราแลกเปลี่ยน ขนาดเสื้อผ้าและรองเท้าสตรี ขนาดเสื้อผ้าและรองเท้าบุรุษ ความเร็วเชิงมุมและการเร่งความเร็ว ความเร่งเชิงมุมความหนาแน่น ปริมาตรเฉพาะ โมเมนต์ความเฉื่อย โมเมนต์ของแรง แรงบิด ค่าความร้อนจำเพาะ (โดยมวล) ความหนาแน่นของพลังงานและค่าความร้อนจำเพาะของเชื้อเพลิง (โดยปริมาตร) ความแตกต่างของอุณหภูมิ , อัตราการถ่ายโอนไอ ระดับเสียง ความไวของไมโครโฟน ระดับความดันเสียง (SPL) ความสว่าง ความเข้มของแสง ความสว่าง ความละเอียดในคอมพิวเตอร์กราฟิก ความถี่และความยาวคลื่น กำลังไดออปเตอร์และความยาวโฟกัส กำลังไดออปเตอร์และกำลังขยายของเลนส์ (×) ค่าไฟฟ้าความหนาแน่นของประจุเชิงเส้น ความหนาแน่นของประจุที่พื้นผิว ความหนาแน่นของประจุแบบก้อน ไฟฟ้าความหนาแน่นกระแสเชิงเส้น ความหนาแน่นกระแสพื้นผิว ความแข็งแรง สนามไฟฟ้าความต่างศักย์ไฟฟ้าสถิตและแรงดันไฟฟ้า ความต้านทานไฟฟ้า เฉพาะ ความต้านทานไฟฟ้าการนำไฟฟ้า การนำไฟฟ้า ความจุไฟฟ้าความเหนี่ยวนำ เกจลวดอเมริกัน ระดับในหน่วย dBm (dBm หรือ dBmW), dBV (dBV), วัตต์ ฯลฯ แรงแม่เหล็ก ความแรงของสนามแม่เหล็ก ฟลักซ์แม่เหล็ก การสลายตัวของกัมมันตภาพรังสี ปริมาณรังสีที่ได้รับ ปริมาณการดูดซึม คำนำหน้าทศนิยม การสื่อสารข้อมูล การพิมพ์และการถ่ายภาพ หน่วยปริมาตรไม้ การคำนวณมวลโมลาร์ ระบบธาตุ องค์ประกอบทางเคมีดี. ไอ. เมนเดเลเยฟ
ค่าเริ่มต้น
มูลค่าที่แปลงแล้ว
นิวตันเมตร นิวตันเซนติเมตร นิวตันมิลลิเมตร กิโลนิวตันเมตร dyne เมตร dyne เซนติเมตร dyne มิลลิเมตร กิโลกรัมแรงเมตร กิโลกรัมแรงเซนติเมตร กิโลกรัมแรงเซนติเมตร กรัมแรงมิลลิเมตร กรัมแรงเซนติเมตร กรัมแรงมิลลิเมตร
เพิ่มเติมเกี่ยวกับแรงบิด
ข้อมูลทั่วไป
เมื่อแรงกระทำต่อร่างกายในทิศทางหนึ่ง ร่างกายจะหัน ความปรารถนาของพลังที่จะหมุนร่างกายนี้อธิบายไว้ ปริมาณทางกายภาพ- แรงบิดหรือโมเมนต์ของแรง แรงเองซึ่งทำให้เกิดการหมุนหรือบิด ตลอดจนระยะห่างระหว่างจุดใช้งานกับจุดหมุนของร่างกาย ส่งผลต่อโมเมนต์ของแรง ในกรณีนี้ แรงเป็นปริมาณเวกเตอร์ ดังนั้นทิศทางของแรงจึงมีความสำคัญเช่นกัน กล่าวคือ มุมระหว่างทิศทางของแรงกับส่วนที่เชื่อมต่อจุดที่ใช้แรงกับจุดศูนย์กลางการหมุนของร่างกาย ถ้ามุมนี้ถูกต้อง นั่นคือ ออกแรงในแนวตั้งฉากกับส่วน ดังนั้นโมเมนต์ของแรงจะสูงสุด เมื่อแรงขนานกับส่วนของเส้นตรง โมเมนต์ของแรงจะลดลง นั่นคือ ยิ่งมุมเข้าใกล้ 0° หรือ 180° มากเท่าไหร่ โมเมนต์ของแรงก็จะยิ่งอ่อนลงจนกระทั่งกลายเป็นศูนย์เมื่อทิศทางของแรงขนานกับส่วน สะดวกที่จะคิดว่าช่วงเวลาของแรงเป็นการรวมกันของระยะทางที่แรงนั้นมาจากจุดหมุนและแรงที่ต้องใช้ในการทำให้วัตถุหมุนด้วยอัตราที่แน่นอน

ลองดูความสัมพันธ์นี้ในภาพประกอบ ในกรณีนี้ แรง F2, F3 และ F5 จะตั้งฉากกับส่วนที่อยู่ระหว่างแกนหมุน ซึ่งระบุเป็นสีน้ำเงินตรงกลางวงล้อจักร และจุดที่ใช้แรง ช่วงเวลาแห่งแรงที่พวกเขาสร้างขึ้นนั้นสูงสุด ในทางกลับกัน แรง F1 และ F4 จะถูกนำไปใช้ที่มุมอื่นที่ไม่ใช่ 90° และโมเมนต์ของแรงที่พวกมันสร้างขึ้นจะไม่สูงสุด นั่นคือ โมเมนต์ของแรงทั้งสองนี้แตกต่างจากโมเมนต์ของแรงอีกสามแรง แม้ว่าขนาดของแรงทั้งหมดในรูปจะเท่ากันก็ตาม
ในการหมุนวัตถุภายใต้อิทธิพลของแรงตามเงื่อนไขที่กำหนด จำเป็นต้องสร้างโมเมนต์ของแรง เนื่องจากค่านี้ขึ้นอยู่กับทั้งระยะทางและแรงที่จะได้รับ ช่วงเวลาที่กำหนดคุณสามารถเปลี่ยนแรงหรือระยะทางจากจุดใช้งานไปยังจุดหมุนได้ ผู้คนใช้การเสพติดนี้มาหลายศตวรรษแล้ว
การใช้แรงชั่วขณะในชีวิตประจำวันและเทคโนโลยี
โดยปกติแล้ว การเพิ่มระยะห่างระหว่างร่างกายกับจุดที่ออกแรงจะง่ายกว่าการเพิ่มแรงเอง ดังนั้น บ่อยครั้ง เมื่อแรงของคนหรือสัตว์ไม่เพียงพอสำหรับงานเฉพาะที่เกี่ยวข้องกับการหมุน คันโยกและอุปกรณ์อื่น ๆ จะถูกใช้เพื่อเพิ่มระยะห่างระหว่างแรงกับแกนของการหมุน และเพิ่มโมเมนต์ของแรง ตัวอย่างเช่น ในการหมุนกังหันลมหรือล้อที่พันบนโซ่เพื่อยกสะพานที่มีน้ำหนักมาก คนหรือสัตว์จะหมุนอุปกรณ์ที่มีด้ามยาวหรือคันโยก คันโยกและที่จับยาวช่วยให้คุณเพิ่มแรงที่ใช้ได้ การเพิ่มขึ้นนี้เป็นสัดส่วนกับระยะห่างระหว่างแกนหมุนของร่างกายกับจุดที่ใช้แรง

แป้นเหยียบจักรยาน
แรงบิดยังใช้ในคันเหยียบจักรยาน ยิ่งเท้าอยู่ห่างจากจุดศูนย์กลางของล้อจักรยานมากเท่าไหร่ แรงเหยียบก็จะยิ่งน้อยลงเท่านั้น ความยาวของขาของเราจำกัดความยาวสูงสุดของแป้นเหยียบ - หากคุณทำแป้นเหยียบให้ยาวกว่าที่เป็นอยู่ในจักรยานยนต์สมัยใหม่ การเลี้ยวจะทำให้ไม่สะดวก แม้จะมีข้อ จำกัด เหล่านี้ แต่คันเหยียบช่วยให้การขี่จักรยานง่ายขึ้นมาก การออกแบบคันเหยียบของจักรยานนั้นสะดวกมากจนบางคน โดยเฉพาะในประเทศกำลังพัฒนาที่ไม่สามารถเข้าถึงเทคโนโลยีล่าสุดได้เสมอไป จะใช้คันเหยียบของจักรยานในการสร้างอุปกรณ์อื่นๆ ที่ต้องใช้การควบคุมด้วยเท้าหรือมือ บางครั้งมีการติดตั้งคันเหยียบดังกล่าวบนรถเข็นเพื่ออำนวยความสะดวกในการบิดล้อด้วยตนเอง ในกรณีนี้ คุณสามารถยืดแป้นเหยียบให้ยาวขึ้นเล็กน้อยเพื่อเพิ่มช่วงเวลาออกแรง แม้ว่าอาจทำให้ควบคุมรถเข็นได้ยากขึ้นบ้าง
ประแจ

ประแจใช้แรงบิดเพื่อลดแรงที่ต้องใช้ในการขันหรือคลายน็อตหรือโบลต์ ประแจได้รับการออกแบบมาให้ถือได้อย่างสะดวกสบาย แต่ในขณะเดียวกัน ด้ามจับที่ยาวจะเพิ่มแรงที่ใช้กับประแจในการขันหรือคลายโบลต์หรือน็อต บางครั้งประแจขนาดเล็กที่มีด้ามสั้นก็เพียงพอแล้ว แต่ในบางกรณีจำเป็นต้องใช้ด้ามที่ยาวกว่า เช่น หากเรากำลังพยายามคลายเกลียวน็อตที่เป็นสนิม หากคุณไม่มีประแจ คุณสามารถใช้คีมได้ ด้ามจับยาวสร้างแรงบิดค่อนข้างสูง แม้ว่าบางครั้งจะจับน็อตหรือสกรูไม่แน่นพอและอาจทำให้เสียหายได้

ความสะดวกของประแจคือเมื่อปรับขนาดให้พอดีกับน็อตแล้ว ต้องใช้แรงในการหมุนประแจเท่านั้น ไม่ใช่เพื่อยึดน็อตไว้ ในทางกลับกัน ต้องจับคีมไว้รอบๆ น็อตเพื่อป้องกันไม่ให้หลุดออก ซึ่งต้องใช้แรงมากเป็นพิเศษ ด้วยเหตุนี้ในหลายกรณีประแจจึงประหยัดกว่าในแง่ของพลังงานที่ใช้ไป ในทางกลับกัน ในบางกรณี คีมจะสะดวกกว่า เช่น สามารถใช้ทำมุมในที่ที่ยากต่อการเข้าถึง ในขณะที่ประแจมักจะทำงานในระนาบเดียวกันกับน็อตเท่านั้น หากคุณคลายเกลียวน็อตเป็นมุม ช่วงเวลาของแรงจะลดลง แต่ก็ดีกว่าไม่สามารถคลายเกลียวได้เลย
เครื่องมือที่ออกแบบมาเพื่อคลายเกลียวฝาจากกระป๋องทำงานในลักษณะเดียวกัน โดยปกติแล้วจะเป็นแถบยางที่ติดอยู่กับที่จับเพื่อให้แถบนั้นมีลักษณะเป็นห่วงซึ่งสามารถปรับขนาดเส้นผ่านศูนย์กลางได้ ตัวห่วงนั้นติดอยู่กับฝาและไม่ส่งผลกระทบต่อช่วงเวลาแห่งแรง แต่ที่จับช่วยสร้างช่วงเวลาที่เหมาะสมเท่านั้น ยิ่งมีขนาดใหญ่เท่าใด ช่วงเวลาแห่งแรงก็ยิ่งมากขึ้นเท่านั้น ต้องขอบคุณเขาที่เปิดขวดได้ง่ายกว่าด้วยมือโดยใช้ผ้าขนหนูหรือวัสดุที่มีค่าสัมประสิทธิ์แรงเสียดทานสูง
มู่เล่

ตัวอย่างที่ดีของอุปกรณ์ที่ใช้แรงบิดคือมู่เล่ ช่วงเวลาแห่งแรงทำให้มันเคลื่อนไหวและยังช่วยเร่งมู่เล่และด้วยการเคลื่อนไหวนี้ทำให้ได้รับพลังงาน มู่เล่จะสะสมและเก็บไว้ใช้ในภายหลัง หากจำเป็นต้องใช้พลังงานนี้เพื่อวัตถุประสงค์อื่น ในทางกลับกัน ช่วงเวลาแห่งแรงจะลดความเร็วของมู่เล่ลง และพลังงานจะถูกสร้างขึ้นซึ่งจะถูกนำไปใช้ตามวัตถุประสงค์ที่ตั้งใจไว้ มู่เล่จะถูกใช้หากแหล่งพลังงานทำงานในโหมดไม่ต่อเนื่อง และจำเป็นต้องใช้พลังงานอย่างต่อเนื่อง นี่เป็นวิธีการใช้มู่เล่ในเครื่องยนต์ของรถยนต์ ซึ่งพลังงานจะถูกปล่อยออกมาใน "แสงวาบ" เมื่อเชื้อเพลิงถูกเผาไหม้
![]()
ในบางกรณี จำเป็นต้องให้ผลตรงกันข้าม กล่าวคือ จำเป็นต้องจัดหาพลังงานจำนวนมากในช่วงเวลาสั้นๆ ซึ่งโดยปกติแล้วจะมีปริมาณมากกว่าที่แหล่งพลังงานจะสามารถผลิตได้ภายในระยะเวลาที่กำหนด ในสถานการณ์เช่นนี้ มู่เล่จะสะสมพลังงานเป็นส่วนเล็กๆ เป็นระยะเวลาหนึ่ง เพื่อที่จะให้พลังงานในปริมาณที่เหมาะสม
ชิงช้าและคันโยก
แรงที่เด็กสองคนกดลงบนชิงช้าขณะนั่งอยู่ที่ด้านใดด้านหนึ่งของจุดศูนย์กลางจะเคลื่อนชิงช้าขึ้นและลง นั่นคือในกรณีนี้การหมุนบางส่วนของการแกว่งรอบแกนจะเกิดขึ้น หากน้ำหนักของเด็กทั้งสองเท่ากันก็สามารถแกว่งได้อย่างง่ายดาย มันยากกว่ามากสำหรับเด็กที่มีน้ำหนักต่างกัน - เด็กที่หนักกว่าดึงวงสวิงลงมาจากด้านข้างของเขาและเด็กที่เบากว่าไม่มีน้ำหนักเพียงพอที่จะลดวงสวิงลงมาที่ด้านข้างของเขา นี่เป็นเพราะน้ำหนักของเด็กที่มีน้ำหนักมากทำให้เกิดแรงที่มากกว่า เพื่อแก้ปัญหานี้ ต้องย้ายเด็กตัวใหญ่เข้ามาใกล้จุดศูนย์กลางให้มากที่สุดเท่าที่น้ำหนักของเขาจะเกินน้ำหนักของเด็กคนที่สอง ตัวอย่างเช่น หากเด็กตัวโตมีน้ำหนักมากกว่าสามเท่า เขาต้องขยับเข้าไปใกล้อีกสามเท่า จากนั้นวงสวิงจึงจะสมดุล
คันโยกทำงานในลักษณะเดียวกัน: ใช้ช่วงเวลาของแรงเพื่อลดแรงที่ต้องใช้ในการทำงานบางอย่าง โดยทั่วไปคันโยกจะเป็นวัตถุทรงสี่เหลี่ยมผืนผ้า เช่น ที่จับหรือบาร์ ที่หมุนรอบจุดที่เรียกว่า ศูนย์กลางของการหมุนหรือจุดหมุน. แรงจะถูกนำไปใช้กับจุดอื่นของคันโยก ซึ่งเนื่องจากความยาวของคันโยก การเพิ่มหรือลดขึ้นอยู่กับการออกแบบของคันโยกและวัตถุประสงค์ของมัน
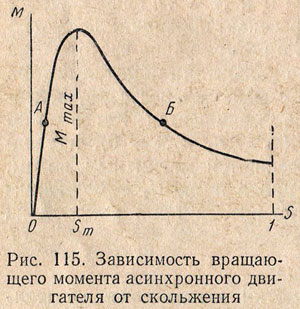
คันโยกแบ่งออกเป็นสามประเภทขึ้นอยู่กับตำแหน่งศูนย์กลางและวิธีการใช้งาน บังคับซึ่งเปลี่ยนพวกเขาและตำแหน่งที่นำไปใช้ แรงต้าน. โดยปกติแล้วพวกเขาจะเรียกว่าคันโยกประเภทที่หนึ่ง, สองและสาม บางครั้งมันไม่ชัดเจนว่าพลังต่อต้านเกี่ยวข้องกับมันอย่างไร แต่มันเป็นอย่างนั้นจริงๆ มันต้านแรงที่สั่งให้หมุนคันโยก เมื่อแรงที่ใช้มากกว่าแรงต้าน คันโยกจะหมุน เราและสัตว์อื่นๆ ใช้หลักการเหล่านี้ในร่างกาย และส่วนต่างๆ ของร่างกายจะกลายเป็นคันโยก ดังตัวอย่างด้านล่าง
คันโยกประเภทแรกการออกแบบที่คล้ายกันกับเครื่องถ่วงสมดุลวงสวิงสำหรับเด็กที่อธิบายไว้ข้างต้น ศูนย์กลางในพวกมันอยู่ตรงกลาง แรงถูกกระทำที่ปลายด้านหนึ่ง และแรงต้านเกิดขึ้นที่ปลายอีกด้านหนึ่ง แกนหมุนเข้า คันโยกประเภทที่สองตั้งอยู่ที่ปลายด้านหนึ่งของคันโยกและมีแรงต้านอยู่ข้างๆ บังคับไปที่คันโยกดังกล่าวที่ปลายอีกด้านหนึ่ง คันโยกประเภทที่สามถูกจัดเรียงในทำนองเดียวกัน แต่ใกล้กับจุดศูนย์กลางของการหมุน ซึ่งอยู่ที่ส่วนท้ายของคันโยก ไม่ใช่แรงต้าน แต่เป็นแรงที่กระทำต่อคันโยก แรงต้านเกิดขึ้นที่ปลายอีกด้านหนึ่งของคันโยก
คันโยกประเภทแรก
เครื่องชั่งที่มีอาวุธเท่ากันพร้อมถ้วยเป็นตัวอย่างของคันโยกประเภทแรก กรรไกร - เช่นกันมีเพียงคันโยกสองอันที่เชื่อมต่อถึงกัน ด้วยความช่วยเหลือของพวกเขา มันง่ายกว่ามีดมากในการตัดวัสดุบางอย่างอย่างระมัดระวัง เช่น กระดาษหรือผ้า ยิ่งด้ามจับยาวขึ้นเท่าใด ก็สามารถตัดวัสดุที่หนาและแข็งขึ้นได้ ในทางกลับกัน ยิ่งวัสดุที่จะตัดอยู่ห่างจากแกนหมุนมากเท่าไหร่ การตัดก็จะยิ่งยากขึ้นเท่านั้น

![]()
ยิ่งวัสดุที่จะตัดมีความหนามากเท่าใด ช่วงเวลาที่ต้องใช้แรงก็จะยิ่งมากขึ้นเท่านั้น และด้ามกรรไกรจะต้องยาวขึ้นและวัสดุที่ใช้ทำก็จะยิ่งแข็งแรงขึ้นเท่านั้น ในบางกรณี สปริงจะถูกเพิ่มเข้าไปในกรรไกร ซึ่งทำให้ใช้งานสะดวกยิ่งขึ้น ตัวอย่างเช่นจัดสวนตัดแต่งกิ่ง นอกจากนี้ กรรไกรเฉพาะยังมีคุณสมบัติอื่นๆ ในทางการแพทย์ กรรไกรจะใช้ปลายมน ปลายทู่ และปลายแหลม ขึ้นอยู่กับวัตถุประสงค์ ซึ่งแตกต่างจากมีดผ่าตัด พวกมันใช้งานสะดวกกว่าและมีข้อได้เปรียบเชิงกลมากกว่ามีดผ่าตัด แม้ว่ามีดผ่าตัดจะใช้กันอย่างแพร่หลายเช่นกัน เพราะในบางกรณีมันสะดวกกว่ากรรไกร กรรไกรทางการแพทย์ที่มีไว้สำหรับใช้โดยแพทย์ฉุกเฉินนั้นมีลักษณะโค้งมนที่ปลายเพื่อให้สามารถตัดเสื้อผ้าได้โดยไม่ทำลายผิวหนัง กรรไกรแพทย์บางอันมีขนาดเล็กมาก ตัวอย่างเช่น กรรไกรผ่าตัดโรคตาอาจมีความยาวเพียง 6 เซนติเมตร ใบมีดยาวได้ถึง 2 เซนติเมตร หรือสั้นกว่านั้น
ชะแลงหรือชะแลงเรียกอีกอย่างว่าชะแลงก็ถือเป็นคันโยกชั้นหนึ่งได้เช่นกัน แม้ว่าบางครั้งอาจเป็นคันโยกชั้นสองหรือสามก็ได้ทั้งนี้ขึ้นอยู่กับการใช้งาน มักใช้เพื่อถอดตะปูตอกออก หรือแยกวัตถุ 2 ชิ้นที่จับด้วยกาว ตะปู คลิปหนีบกระดาษ และวิธีการที่คล้ายกัน ชะแลงได้รับชื่อเสียงที่ไม่ดีในฐานะเครื่องมือสำหรับหัวขโมย หัวขโมย และอาชญากรอื่น ๆ แม้ว่าในความเป็นจริงแล้วอาชญากรจะใช้วัสดุและเครื่องมือใด ๆ ที่มีอยู่ในมือ ตราบใดที่พวกเขาช่วยให้บรรลุผลสุดท้าย
ตัวอย่างของคานชนิดแรกในร่างกายมนุษย์และสัตว์บางชนิดคือหัว มันอยู่บนคออย่างสมดุล คอเป็นศูนย์กลางของการหมุน ความแข็งแรงของกล้ามเนื้อถูกนำไปใช้ที่ด้านหนึ่งของศีรษะ แรงต้านที่อีกด้านหนึ่ง เมื่อแรงที่กระทำมีมากพอ ศีรษะจะเอียงไปตามทิศทางของแรงนั้น
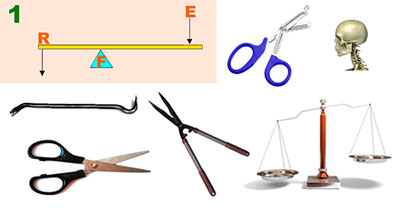
คันโยกประเภทที่สอง
ตัวอย่างของคันโยกประเภทที่สอง ได้แก่ ขากรรไกรของมนุษย์และสัตว์ และจงอยปากของนก พวกเขาเป็นแคร็กเกอร์เช่นเดียวกับแคร็กเกอร์ตกแต่ง แหนบมักทำจากโลหะ แม้ว่าบางครั้งอาจมีผลิตภัณฑ์จากวัสดุอื่น เช่น ไม้ แคร็กเกอร์เป็นคีมคีบที่ทำจากไม้และตกแต่งเหมือนตุ๊กตา ก่อนหน้านี้พวกเขาใช้ตามวัตถุประสงค์ แต่ตอนนี้พวกเขาส่วนใหญ่เป็นของประดับตกแต่ง ส่วนใหญ่มักจะทำในรูปแบบของทหาร กษัตริย์ และรูปแกะสลักอื่นๆ ในสหรัฐอเมริกาและแคนาดามักใช้รูปแกะสลักดังกล่าวเป็นของประดับตกแต่งวันคริสต์มาส มีความเชื่อกันว่าแคร็กเกอร์เริ่มทำขึ้นในพื้นที่ป่าของเยอรมนี พวกเขายังคงทำขายเป็นของที่ระลึก ตอนนี้สำหรับการแยกถั่วมักใช้แหนบธรรมดาไม่ใช่แคร็กเกอร์ คีมเหล่านี้คล้ายกับที่ใช้แยกกรงเล็บของปูและกุ้งก้ามกราม อย่างไรก็ตาม กรงเล็บปูและกุ้งก้ามกรามเองก็เป็นคันโยกแถวที่สองเช่นกัน และใช้หลักการเดียวกับแคร็กเกอร์

ที่บดกระเทียมเป็นอีกตัวอย่างหนึ่งของคันโยกแถวที่สอง มันคล้ายกับการออกแบบแคร็กเกอร์ มักใช้ในชีวิตประจำวัน แม้ว่าผู้ปรุงอาหารบางคนชอบสับกระเทียมให้ละเอียด และพบว่าที่กดกระเทียมทำให้รสชาติของกระเทียมเสียไป ในทางตรงกันข้าม คนอื่นๆ จะใช้ที่บดกระเทียมเท่านั้น เนื่องจากรสชาติของกระเทียมจะเพิ่มขึ้นตามการใช้งาน
เท้าของคนและสัตว์บางชนิดก็เป็นคันโยกแบบที่สองเช่นกัน ศูนย์กลางในกรณีนี้คือบริเวณนิ้ว กล้ามเนื้อขาใช้แรงใกล้กับส้นเท้า และแรงต้านคือน้ำหนักของเรา "คันโยก" นี้ช่วยให้เรารักษาสมดุลเช่นเดียวกับการขึ้นและลงด้วยนิ้วของเรา
ตัวอย่างอื่นๆ ของคันโยกระดับสอง ได้แก่ รถเข็น เบรกรถยนต์ และประตู หากคุณดันประตูใกล้กับแกนหมุนก็จะเปิดได้ยาก แต่ถ้าคุณดันให้ไกลที่สุดจากแกนนี้ แม้แต่ประตูหนักๆ ก็ยังเปิดได้อย่างง่ายดาย นั่นคือเหตุผลที่มือจับทำจากด้านตรงข้ามกับตำแหน่งของลูป เพื่อให้แม้แต่ประตูที่มีน้ำหนักมากก็สามารถเปิดได้กว้างขึ้น
ที่เปิดขวดก็เป็นคันโยกชั้นสองเช่นกัน โดยเฉพาะที่ไม่ติดกับผนัง เช่น บาร์และร้านอาหารบางแห่ง มีดบางประเภทมีที่เปิดขนาดเล็ก ที่เปิดพวงกุญแจก็เป็นที่นิยมเช่นกัน หากไม่มีที่เปิดอยู่ในมือบางครั้งก็ใช้วัสดุชั่วคราวเช่นมีดหรือส้อม ในบางกรณีสามารถใช้ที่เปิดขวดเพื่อแงะฝาขวดที่บิดเบี้ยวได้ หากทำได้ดี ขวดโหลจะเปิดได้ง่ายขึ้น บางครั้ง openers ใช้เป็นคันโยกชั้นหนึ่ง ในกรณีนี้ตัวเปิดจะยึดกับฝาด้วยวิธีอื่นและใช้แรงกดจากด้านล่างไม่ใช่จากด้านบนเช่นเดียวกับคันโยกประเภทที่สอง

คันโยกประเภทที่สาม
หากคุณยกของหนักด้วยมือ งอข้อศอก มือของคุณจะกลายเป็นคันโยกแบบที่สาม ขณะวิ่งและเดิน ขาจะกลายเป็นคันโยก ศูนย์กลางของคันโยกในกรณีนี้อยู่ที่ข้อศอกและหัวเข่า หากคุณ "ยืด" แขนด้วยเครื่องดนตรี เช่น ไม้เบสบอลหรือไม้เทนนิส คุณจะได้คันโยกแบบที่สามอีกครั้ง ในการทำให้คันโยกนี้เคลื่อนที่ ให้ใช้แรงใกล้กับจุดศูนย์กลางของการหมุน ในกรณีนี้ การต่อต้านจะเกิดขึ้นที่ปลายอีกด้านหนึ่ง ในกรณีของแร็กเกตและไม้ตี แรงต้านคือตำแหน่งที่พวกมันสัมผัสกับลูกบอล ก้านยังเป็นคันโยกประเภทที่สามและแรงจะถูกนำไปใช้ในบริเวณข้อมือ
ตัวอย่างอื่นๆ ของคันโยกประเภทที่สาม ได้แก่ ค้อน และเครื่องมือที่คล้ายกัน เช่น พลั่ว คราด ไม้กวาด และไม้ตีแมลงวัน เครื่องมือบางอย่างประกอบด้วยคันโยกสองตัวพร้อมกันซึ่งทำหน้าที่เข้าหากัน นี่คือวิธีการจัดเรียงแหนบ ที่เย็บกระดาษ และคีม
ตัวอย่าง
ทีนี้มาดูตัวอย่างกัน ลองนึกภาพว่าคนธรรมดาที่มีโครงสร้างปานกลางสามารถยกหินที่มีน้ำหนัก 20 กก. แน่นอนว่ามันจะไม่ง่ายและคุณจะต้องเกร็งกล้ามเนื้อมาก แต่ก็ค่อนข้างเป็นไปได้ที่จะยกก้อนหินดังกล่าว ในอีกด้านหนึ่ง เด็กเล็กไม่สามารถยกหินดังกล่าวได้ หากคุณให้ชะแลงแก่เด็กที่ยาวพอและแข็งแรงพอและสอนวิธีใช้มันให้เขา เขาจะรับมือกับงานนี้ได้ เนื่องจากแรงที่ต้องใช้ในการยกหินจะลดลงอย่างมาก อาร์คิมีดีสกล่าวว่าเขาสามารถเคลื่อนโลกได้หากเขายืนห่างจากมันมากพอและใช้คันโยกยาวๆ ข้อความนี้ใช้หลักการเดียวกัน หลังจากที่เรายกหินน้ำหนัก 20 กิโลกรัมขึ้นด้วยชะแลง - คันโยกแบบแรก - เราสามารถโหลดลงบนรถเข็น - คันโยกแบบที่สอง - และนำมันไปเมื่อจำเป็นโดยยกด้วยมือของเรา - คันโยกแบบที่สาม
คุณคิดว่ามันยากไหมที่จะแปลหน่วยวัดจากภาษาหนึ่งเป็นอีกภาษาหนึ่ง เพื่อนร่วมงานพร้อมที่จะช่วยเหลือคุณ โพสต์คำถามไปที่ TCTermsและภายในไม่กี่นาทีคุณจะได้รับคำตอบ
โมเมนต์ของแรงรอบแกน หรือเรียกง่ายๆ ว่า โมเมนต์ของแรง เรียกว่า เส้นโครงของแรงบนเส้นตรงที่ตั้งฉากกับรัศมี และวาด ณ จุดที่ใช้แรง คูณด้วยระยะทางจากจุดนี้ถึงแกน หรือผลคูณของแรงบนไหล่ของการใช้งาน ไหล่ในกรณีนี้คือระยะห่างจากแกนถึงจุดที่ใช้แรง โมเมนต์ของแรงแสดงลักษณะการหมุนของแรงในร่างกาย แกนในกรณีนี้คือตำแหน่งที่แนบร่างกายซึ่งสัมพันธ์กับที่สามารถหมุนได้ หากร่างกายไม่ได้รับการแก้ไขจุดศูนย์กลางของมวลจะถือเป็นแกนหมุน
สูตร 1 - โมเมนต์ของแรง
F - แรงที่กระทำต่อร่างกาย
r - ความแข็งแรงของไหล่
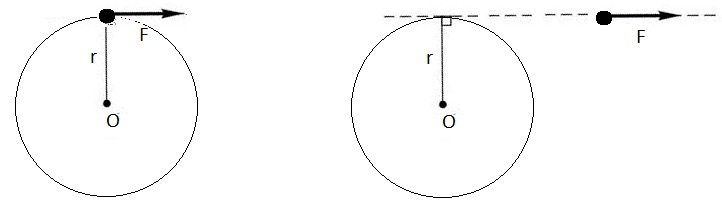
รูปที่ 1 - โมเมนต์ของแรง
ดังที่เห็นได้จากรูป ไหล่ของแรงคือระยะทางจากแกนถึงจุดที่ใช้แรง แต่ในกรณีนี้ถ้ามุมระหว่างพวกมันคือ 90 องศา หากไม่ใช่ในกรณีนี้จำเป็นต้องวาดเส้นตามแนวการกระทำของแรงและลดแนวตั้งฉากจากแกนลงไป ความยาวของเส้นตั้งฉากนี้จะเท่ากับแขนของแรง และการเคลื่อนจุดที่ใช้แรงไปตามทิศทางของแรงนั้นจะไม่เปลี่ยนโมเมนตัม
เป็นเรื่องปกติที่จะพิจารณาช่วงเวลาแห่งพลังในเชิงบวกซึ่งทำให้ร่างกายหมุนตามเข็มนาฬิกาเมื่อเทียบกับจุดสังเกต และลบตามลำดับทำให้เกิดการหมุนเข้าหากัน โมเมนต์ของแรงมีหน่วยวัดเป็นนิวตันต่อเมตร หนึ่งนิวตันเมตรคือแรง 1 นิวตันที่กระทำต่อแขนยาว 1 เมตร
ถ้าแรงที่กระทำต่อร่างกายผ่านไปตามแนวเส้นผ่านแกนหมุนของร่างกายหรือจุดศูนย์กลางมวล ถ้าร่างกายไม่มีแกนหมุน จากนั้นโมเมนต์ของแรงในกรณีนี้จะเท่ากับศูนย์ เนื่องจากแรงนี้จะไม่ทำให้เกิดการหมุนของร่างกาย แต่จะเคลื่อนไปข้างหน้าตามแนวการใช้งาน
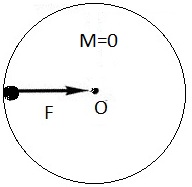
รูปที่ 2 - โมเมนต์ของแรงเป็นศูนย์
หากมีแรงหลายอย่างกระทำต่อร่างกาย โมเมนต์ของแรงจะถูกกำหนดโดยผลลัพธ์ของมัน ตัวอย่างเช่น แรงสองแรงที่มีขนาดเท่ากันและพุ่งตรงข้ามกันสามารถกระทำกับร่างกายได้ ในกรณีนี้ โมเมนต์รวมของแรงจะเท่ากับศูนย์ เนื่องจากพลังเหล่านี้จะชดเชยซึ่งกันและกัน พูดง่ายๆ ให้นึกภาพม้าหมุนของเด็กๆ ถ้าเด็กผู้ชายคนหนึ่งผลักมันตามเข็มนาฬิกา และอีกคนผลักมันด้วยแรงเท่ากัน ม้าหมุนก็จะนิ่ง
ซึ่งเท่ากับผลคูณของแรงบนไหล่ของเธอ
โมเมนต์ของแรงคำนวณโดยใช้สูตร:
ที่ไหน ฉ- บังคับ, ล- แขนแห่งความแข็งแกร่ง
ไหล่แห่งความแข็งแกร่งคือระยะทางที่สั้นที่สุดจากแนวแรงกระทำถึงแกนหมุนของวัตถุ ภาพด้านล่างแสดง แข็งซึ่งสามารถหมุนรอบแกนได้ แกนของการหมุนของวัตถุนี้ตั้งฉากกับระนาบของรูปร่างและผ่านจุดหนึ่งซึ่งกำหนดเป็นตัวอักษร O ไหล่ของแรง เอฟ ทีนี่คือระยะทาง ลจากแกนหมุนถึงแนวการกระทำของแรง มันถูกกำหนดด้วยวิธีนี้ ขั้นตอนแรกคือการวาดเส้นแรงกระทำจากนั้นจากจุด O ซึ่งแกนหมุนของร่างกายผ่านเส้นตั้งฉากจะลดลงจนถึงแนวการกระทำของแรง ความยาวของเส้นตั้งฉากนี้กลายเป็นแขนของแรงที่กำหนด

โมเมนต์ของแรงแสดงลักษณะการหมุนของแรง การดำเนินการนี้ขึ้นอยู่กับความแข็งแกร่งและเลเวอเรจ ยิ่งไหล่มีขนาดใหญ่เท่าใด ต้องใช้แรงน้อยลงเพื่อให้ได้ผลลัพธ์ที่ต้องการ นั่นคือ ออกแรงเท่าเดิม (ดูรูปด้านบน) นั่นเป็นเหตุผลว่าทำไมการเปิดประตูโดยดันเข้าไปใกล้บานพับจึงยากกว่าการจับที่จับ และการไขน็อตด้วยประแจยาวทำได้ง่ายกว่าการใช้ประแจสั้น
หน่วยของโมเมนต์ของแรงใน SI นั้นถือเป็นโมเมนต์ของแรง 1 นิวตัน ซึ่งแขนของโมเมนต์คือ 1 ม. - หนึ่งนิวตันเมตร (N ม.)
กฎชั่วขณะ
วัตถุแข็งที่สามารถหมุนรอบแกนคงที่จะอยู่ในสภาวะสมดุลหากโมเมนต์ของแรง ม.1หมุนตามเข็มนาฬิกาเท่ากับโมเมนต์ของแรง ม 2 ซึ่งหมุนทวนเข็มนาฬิกา:
กฎของช่วงเวลาเป็นผลมาจากหนึ่งในทฤษฎีบทกลศาสตร์ซึ่งคิดค้นโดยนักวิทยาศาสตร์ชาวฝรั่งเศส P. Varignon ในปี 1687
พลังสองสามอย่าง
หากวัตถุถูกกระทำด้วยแรงที่เท่ากันและตรงข้ามกัน 2 แรงซึ่งไม่ได้อยู่บนเส้นตรงเส้นเดียว วัตถุนั้นจะไม่อยู่ในสภาวะสมดุล เนื่องจากโมเมนต์ที่เกิดจากแรงเหล่านี้เทียบกับแกนใด ๆ จะไม่เท่ากับศูนย์ เนื่องจากแรงทั้งสองมีโมเมนต์ที่พุ่งไปในทิศทางเดียวกัน เรียกว่าแรงสองแรงที่กระทำพร้อมกันในร่างกาย สองสามกองกำลัง. หากร่างกายยึดอยู่กับแกนก็จะหมุนภายใต้การกระทำของแรงคู่หนึ่ง หากมีการใช้กำลังสองสามอย่าง ร่างกายฟรีแล้วจะหมุนรอบแกน ผ่านจุดศูนย์ถ่วงของร่างกาย รูปที่ ข.
โมเมนต์ของแรงคู่หนึ่งจะเท่ากันสำหรับแกนที่ตั้งฉากกับระนาบของแรงคู่ รวมช่วงเวลา มคู่จะเท่ากับผลคูณของแรงใดแรงหนึ่งเสมอ ฉในระยะทาง ลระหว่างกองกำลังที่เรียกว่า คู่ไหล่ไม่ว่าจะภาคส่วนใด ลและแบ่งปันตำแหน่งของแกนของแขนของทั้งคู่:
โมเมนต์ของแรงหลายแรงซึ่งผลลัพธ์มีค่าเท่ากับศูนย์จะเท่ากันสำหรับแกนทั้งหมดที่ขนานกัน ดังนั้นการกระทำของแรงเหล่านี้ทั้งหมดในร่างกายสามารถถูกแทนที่ด้วยการกระทำของแรงคู่เดียวในช่วงเวลาเดียวกัน
กำลังมอเตอร์และแรงบิด
บทนี้มุ่งเน้นไปที่แรงบิด: มันคืออะไร มีไว้เพื่ออะไร ฯลฯ เราจะวิเคราะห์ประเภทของโหลดโดยขึ้นอยู่กับรุ่นของปั๊มและความสอดคล้องกันระหว่างมอเตอร์ไฟฟ้ากับโหลดของปั๊ม
คุณเคยพยายามหมุนเพลาของปั๊มเปล่าด้วยมือหรือไม่? ตอนนี้ลองนึกภาพการหมุนในขณะที่ปั๊มน้ำเต็ม คุณจะรู้สึกว่าในกรณีนี้ต้องใช้ความพยายามมากขึ้นในการสร้างแรงบิด
ลองนึกภาพว่าคุณต้องหมุนเพลาปั๊มติดต่อกันหลายชั่วโมง คุณจะเหนื่อยเร็วขึ้นหากปั๊มเติมน้ำ และคุณจะรู้สึกว่าคุณใช้พลังงานมากขึ้นในช่วงเวลาเดียวกัน มากกว่าเมื่อคุณดำเนินการควบคุมแบบเดียวกันด้วยปั๊มเปล่า ข้อสังเกตของคุณถูกต้องอย่างยิ่ง: จำเป็น พลังอันยิ่งใหญ่ซึ่งเป็นการวัดงาน (พลังงานที่ใช้ไป) ต่อหน่วยเวลา ตามกฎแล้วกำลังของมอเตอร์ไฟฟ้ามาตรฐานจะแสดงเป็นกิโลวัตต์

แรงบิด (T) เป็นผลคูณของแรงและแขนของแรง ในยุโรปมีหน่วยวัดเป็นนิวตันต่อเมตร (Nm)
ดังที่คุณเห็นจากสูตร แรงบิดจะเพิ่มขึ้นหากแรงหรือแขนของแรงเพิ่มขึ้น - หรือทั้งสองอย่าง ตัวอย่างเช่น หากเราใช้แรง 10 นิวตัน ซึ่งเท่ากับ 1 กิโลกรัม กับเพลา โดยคันโยกยาว (แขนบังคับ) 1 เมตร แรงบิดที่ได้จะเท่ากับ 10 นิวตันเมตร เมื่อเพิ่มแรงเป็น 20 นิวตันหรือ 2 กก. แรงบิดจะเท่ากับ 20 นิวตันเมตร ในทำนองเดียวกัน แรงบิดจะเท่ากับ 20 นิวตันเมตรหากยืดคันโยกออกไป 2 เมตรและออกแรงเป็น 10 นิวตัน หรือด้วยแรงบิด 10 นิวตันเมตรโดยมีแขนบังคับ 0.5 เมตร แรงควรจะเป็น 20 นิวตัน

งานและพลังงาน
ทีนี้มาดูแนวคิดเช่น "งาน" ซึ่งในบริบทนี้มีความหมายพิเศษ งานเสร็จสิ้นเมื่อใดก็ตามที่มีแรง - แรงใด ๆ - ทำให้เกิดการเคลื่อนที่ งานเท่ากับแรงคูณระยะทาง สำหรับการเคลื่อนที่เชิงเส้น พลังงานจะแสดงเป็นงานที่ทำ ณ เวลาที่กำหนด
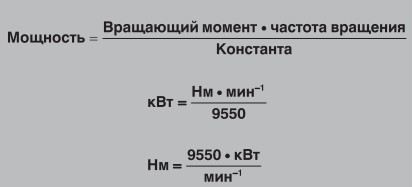
หากเรากำลังพูดถึงการหมุน กำลังจะแสดงเป็นแรงบิด (T) คูณด้วยความเร็วในการหมุน (w)
![]()
ความเร็วในการหมุนของวัตถุถูกกำหนดโดยการวัดเวลาที่ใช้สำหรับจุดที่กำหนดบนวัตถุที่หมุนเพื่อทำการหมุนรอบเต็ม โดยปกติค่านี้จะแสดงเป็นรอบต่อนาที เช่น นาที-1 หรือรอบต่อนาที ตัวอย่างเช่น หากวัตถุหมุนครบ 10 รอบต่อนาที หมายความว่าความเร็วรอบของวัตถุคือ 10 นาที-1 หรือ 10 รอบต่อนาที
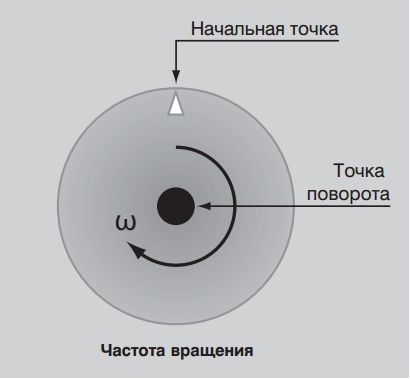
ดังนั้น ความเร็วในการหมุนจะวัดเป็นรอบต่อนาที เช่น นาที-1
เรานำหน่วยการวัดเป็นรูปแบบทั่วไป
เพื่อความชัดเจน เราจะใช้มอเตอร์ไฟฟ้าแบบต่างๆ เพื่อวิเคราะห์รายละเอียดเพิ่มเติมเกี่ยวกับความสัมพันธ์ระหว่างกำลัง แรงบิด และความเร็ว แม้ว่าแรงบิดและความเร็วของมอเตอร์ไฟฟ้าจะแตกต่างกันมาก แต่ก็สามารถมีกำลังเท่ากันได้

ตัวอย่างเช่น สมมติว่าเรามีมอเตอร์ 2 ขั้ว (3000 รอบต่อนาที) และมอเตอร์ 4 ขั้ว (1500 รอบต่อนาที) พลังของมอเตอร์ไฟฟ้าทั้งสองคือ 3.0 กิโลวัตต์ แต่แรงบิดต่างกัน
ดังนั้น แรงบิดของมอเตอร์แบบ 4 ขั้วจึงเป็นสองเท่าของมอเตอร์แบบ 2 ขั้วที่มีกำลังเท่ากัน
แรงบิดและความเร็วเกิดขึ้นได้อย่างไร?
ตอนนี้เราได้กล่าวถึงพื้นฐานของแรงบิดและความเร็วในการหมุนแล้ว มาดูกันว่าพวกมันถูกสร้างขึ้นมาอย่างไร
ในมอเตอร์ไฟฟ้า กระแสสลับแรงบิดและความเร็วในการหมุนเกิดขึ้นจากการทำงานร่วมกันระหว่างโรเตอร์และสนามแม่เหล็กหมุน สนามแม่เหล็กรอบ ๆ ขดลวดของโรเตอร์จะโน้มเข้าหาสนามแม่เหล็กของสเตเตอร์ ภายใต้สภาวะการทำงานจริง ความเร็วของโรเตอร์จะล้าหลังสนามแม่เหล็กเสมอ ดังนั้นสนามแม่เหล็กของโรเตอร์จึงข้ามสนามแม่เหล็กของสเตเตอร์และเคลื่อนตัวไปข้างหลังและสร้างแรงบิด ความแตกต่างของความเร็วในการหมุนของโรเตอร์และสเตเตอร์ซึ่งวัดเป็น % เรียกว่าความเร็วสลิป

ลื่นเป็นพารามิเตอร์หลักของมอเตอร์ไฟฟ้าโดยระบุโหมดการทำงานและโหลด ยิ่งมอเตอร์ต้องรับภาระมากเท่าไร การลื่นไถลก็จะยิ่งมากขึ้นเท่านั้น
โดยคำนึงถึงสิ่งที่กล่าวไว้ข้างต้น มาวิเคราะห์สูตรเพิ่มเติมอีกสองสามสูตร แรงบิดของมอเตอร์เหนี่ยวนำขึ้นอยู่กับความแรงของสนามแม่เหล็กของโรเตอร์และสเตเตอร์ รวมถึงความสัมพันธ์ของเฟสระหว่างสนามเหล่านี้ อัตราส่วนนี้แสดงในสูตรต่อไปนี้:
ความแรงของสนามแม่เหล็กส่วนใหญ่ขึ้นอยู่กับการออกแบบของสเตเตอร์และวัสดุที่ใช้ทำสเตเตอร์ อย่างไรก็ตาม ความถี่ของแรงดันและกระแสก็มีบทบาทสำคัญเช่นกัน อัตราส่วนแรงบิดเป็นสัดส่วนกับกำลังสองของอัตราส่วนความเค้น นั่นคือ หากแรงดันไฟฟ้าที่ใช้ลดลง 2% แรงบิดจะลดลง 4%

กระแสของโรเตอร์ถูกเหนี่ยวนำผ่านแหล่งจ่ายไฟที่มอเตอร์ไฟฟ้าเชื่อมต่ออยู่ และสนามแม่เหล็กบางส่วนถูกสร้างขึ้นโดยแรงดันไฟฟ้า สามารถคำนวณกำลังไฟฟ้าเข้าได้หากเราทราบข้อมูลแหล่งจ่ายไฟของมอเตอร์ เช่น แรงดันไฟฟ้า ตัวประกอบกำลัง การใช้กระแสไฟฟ้า และประสิทธิภาพ

ในยุโรป กำลังเพลามักจะวัดเป็นกิโลวัตต์ ในสหรัฐอเมริกา กำลังเพลาวัดเป็นแรงม้า (hp)
หากคุณจำเป็นต้องแปล แรงม้าเป็นกิโลวัตต์ เพียงคูณค่าที่เกี่ยวข้อง (เป็นแรงม้า) ด้วย 0.746 ตัวอย่างเช่น 20 แรงม้า เท่ากับ (20 0.746) = 14.92 กิโลวัตต์
ในทางกลับกัน กิโลวัตต์สามารถแปลงเป็นแรงม้าได้โดยการคูณค่ากิโลวัตต์ด้วย 1.341 ซึ่งหมายความว่า 15 กิโลวัตต์เท่ากับ 20.11 แรงม้า
แรงบิดของมอเตอร์
กำลัง [kW หรือ hp] เชื่อมโยงแรงบิดกับความเร็วรอบเพื่อกำหนดปริมาณงานทั้งหมดที่ต้องทำในระยะเวลาที่กำหนด
พิจารณาปฏิสัมพันธ์ระหว่างแรงบิด กำลัง และความเร็ว รวมถึงความสัมพันธ์ของพวกมันด้วย แรงดันไฟฟ้าในตัวอย่างมอเตอร์ไฟฟ้าของกรุนด์ฟอส มอเตอร์ไฟฟ้ามีอัตรากำลังเท่ากันทั้งที่ 50 Hz และ 60 Hz

ส่งผลให้แรงบิดลดลงอย่างมากที่ 60 Hz: 60 Hz ทำให้ RPM เพิ่มขึ้น 20% ส่งผลให้แรงบิดลดลง 20% ผู้ผลิตส่วนใหญ่ต้องการระบุกำลังมอเตอร์ที่ 60 Hz ดังนั้นเมื่อความถี่หลักลดลงถึง 50 Hz มอเตอร์จะให้กำลังและแรงบิดของเพลาน้อยลง มอเตอร์ไฟฟ้าให้กำลังเท่ากันที่ 50 และ 60 Hz
การแสดงกราฟิกของแรงบิดของมอเตอร์แสดงอยู่ในรูป

ภาพประกอบแสดงคุณลักษณะของแรงบิด/ความเร็วโดยทั่วไป ต่อไปนี้เป็นคำศัพท์ที่ใช้เพื่อระบุลักษณะแรงบิดของมอเตอร์ไฟฟ้ากระแสสลับ
แรงบิดเริ่มต้น(Mn): แรงบิดเชิงกลที่พัฒนาโดยมอเตอร์ไฟฟ้าบนเพลาเมื่อเริ่มต้น เช่น เมื่อกระแสไฟฟ้าผ่านมอเตอร์เต็มแรงดันในขณะที่เพลาถูกล็อค
ขั้นต่ำ แรงบิดเริ่มต้น (Mmin): คำนี้ใช้เพื่ออ้างถึงจุดต่ำสุดบนเส้นโค้งแรงบิด/ความเร็วของมอเตอร์ที่กำลังโหลดด้วยความเร็วสูงสุด สำหรับมอเตอร์ของกรุนด์ฟอสส่วนใหญ่ แรงบิดเริ่มต้นขั้นต่ำไม่ได้ระบุแยกต่างหาก เนื่องจากจุดต่ำสุดอยู่ที่จุดโรเตอร์ล็อค ด้วยเหตุนี้ สำหรับมอเตอร์ของกรุนด์ฟอสส่วนใหญ่ แรงบิดเริ่มต้นขั้นต่ำจะเท่ากับแรงบิดเริ่มต้น
ช่วงเวลาล็อค(บล็อก M): แรงบิดสูงสุดคือแรงบิดที่มอเตอร์ไฟฟ้ากระแสสลับสร้างขึ้น พิกัดแรงดันไฟฟ้าจ่ายที่ความถี่ที่กำหนดโดยไม่มีการกระโดดอย่างรวดเร็วในความเร็วรอบ เรียกว่าลิมิตโอเวอร์โหลดทอร์กหรือแรงบิดสูงสุด
แรงบิดที่โหลดเต็มที่(ม.ป.น.): แรงบิดที่ต้องใช้ในการสร้าง กำลังไฟเมื่อโหลดเต็ม
ประเภทโหลดของปั๊มและโหลดของมอเตอร์
โหลดประเภทต่อไปนี้มีความแตกต่าง:
พลังงานคงที่
คำว่า "กำลังคงที่" ใช้กับโหลดบางประเภทที่ต้องการแรงบิดน้อยลงเมื่อความเร็วเพิ่มขึ้น และในทางกลับกัน โหลดที่กำลังคงที่มักใช้ในงานโลหะ เช่น การเจาะ การรีด เป็นต้น

แรงบิดคงที่
ตามชื่อที่แสดงถึง - "แรงบิดคงที่" - เป็นที่เข้าใจกันว่าปริมาณของแรงบิดที่ต้องใช้ในการขับเคลื่อนกลไกใดๆ นั้นคงที่ โดยไม่คำนึงถึงความเร็วของการหมุน สายพานลำเลียงเป็นตัวอย่างของโหมดการทำงานนี้

แรงบิดและกำลังแปรผัน
"แรงบิดแปรผัน" - หมวดหมู่นี้เป็นที่สนใจของเรามากที่สุด โมเมนต์นี้เกี่ยวข้องกับโหลดที่ต้องการแรงบิดต่ำที่ความเร็วต่ำ และเมื่อความเร็วเพิ่มขึ้น แรงบิดก็จะยิ่งสูงขึ้น ปั๊มหอยโข่งเป็นตัวอย่างทั่วไป
ส่วนที่เหลือของ ส่วนนี้จะเน้นไปที่แรงบิดและกำลังแบบแปรผันเท่านั้น
เมื่อพิจารณาแล้วว่าแรงบิดแปรผันเป็นเรื่องปกติสำหรับปั๊มหอยโข่ง เราต้องวิเคราะห์และประเมินคุณลักษณะบางอย่างของปั๊มหอยโข่ง การใช้ไดรฟ์แบบปรับความเร็วได้นั้นอยู่ภายใต้กฎพิเศษทางฟิสิกส์ ในกรณีนี้นี้ กฎหมายความคล้ายคลึงกัน ซึ่งอธิบายความสัมพันธ์ระหว่างความแตกต่างของแรงดันและอัตราการไหล
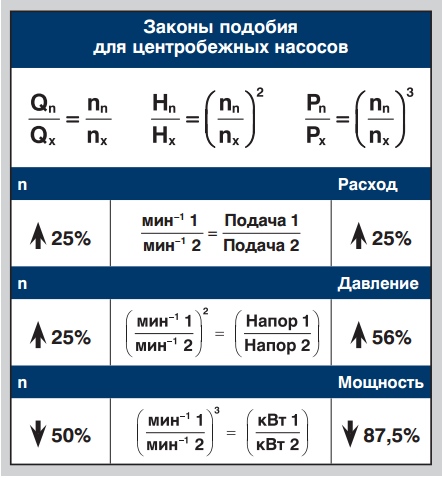
ประการแรก การไหลของปั๊มเป็นสัดส่วนโดยตรงกับความเร็ว ซึ่งหมายความว่าหากปั๊มทำงานที่ความเร็วเพิ่มขึ้น 25% การไหลจะเพิ่มขึ้น 25%
ประการที่สอง หัวปั๊มจะเปลี่ยนตามสัดส่วนกำลังสองของการเปลี่ยนแปลงความเร็วรอบ ถ้าความเร็วเพิ่มขึ้น 25% ความดันจะเพิ่มขึ้น 56%
ประการที่สามและที่น่าสนใจที่สุดคือกำลังเป็นสัดส่วนกับลูกบาศก์ของการเปลี่ยนแปลงความเร็วรอบ ซึ่งหมายความว่าหากความเร็วที่ต้องการลดลง 50% จะเท่ากับการลดการใช้พลังงานลง 87.5%
โดยสรุป กฎของมาตราส่วนอธิบายว่าทำไมไดรฟ์แบบปรับความเร็วได้จึงเหมาะสมกว่าสำหรับการใช้งานที่ต้องการการไหลและแรงดันแบบแปรผัน กรุนด์ฟอสมีมอเตอร์หลายรุ่นพร้อมอินทิเกรต ตัวแปลงความถี่ซึ่งจะปรับความเร็วในการหมุนเพื่อให้บรรลุเป้าหมายนี้
เช่นเดียวกับการไหล แรงดัน และกำลัง ปริมาณแรงบิดที่ต้องการขึ้นอยู่กับความเร็วของการหมุน
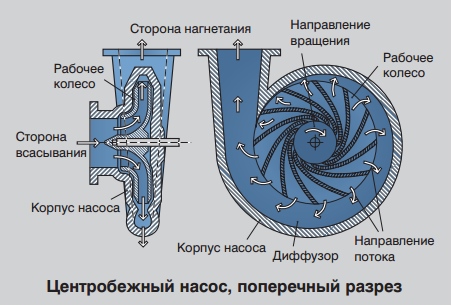
ภาพแสดงมุมมองของปั๊มหอยโข่ง ข้อกำหนดด้านแรงบิดสำหรับโหลดประเภทนี้เกือบจะตรงกันข้ามกับข้อกำหนดสำหรับ "กำลังคงที่" สำหรับโหลดแรงบิดแบบแปรผัน แรงบิดที่ต้องการที่ความเร็วต่ำจะมีค่าน้อย และแรงบิดที่ต้องการอยู่ที่ ความถี่สูงการหมุนนั้นยอดเยี่ยม ในแง่คณิตศาสตร์ แรงบิดเป็นสัดส่วนกับกำลังสองของความเร็วในการหมุน และกำลังเป็นสัดส่วนกับกำลังสองของความเร็วในการหมุน

สามารถแสดงได้โดยใช้คุณสมบัติแรงบิด/ความเร็วที่เราใช้ก่อนหน้านี้เมื่อพูดถึงแรงบิดของมอเตอร์:
เมื่อมอเตอร์เพิ่มความเร็วจากศูนย์เป็นความเร็วพิกัด แรงบิดสามารถเปลี่ยนแปลงได้อย่างมาก ปริมาณของแรงบิดที่จำเป็นสำหรับการโหลดที่กำหนดยังแปรผันตามความเร็วอีกด้วย เพื่อให้มอเตอร์เหมาะสมกับโหลดที่กำหนด จำเป็นที่จำนวนแรงบิดของมอเตอร์จะเกินแรงบิดที่จำเป็นสำหรับโหลดที่กำหนดเสมอ

ในตัวอย่าง ปั๊มหอยโข่งที่โหลดพิกัดมีแรงบิด 70 นิวตันเมตร ซึ่งสอดคล้องกับ 22 กิโลวัตต์ที่ความเร็วพิกัด 3000 นาที-1 ในกรณีนี้ ปั๊มต้องการแรงบิด 20% ที่โหลดพิกัดเมื่อเริ่มทำงาน เช่น ประมาณ 14 นิวตันเมตร หลังจากสตาร์ท แรงบิดจะลดลงเล็กน้อย จากนั้นเมื่อปั๊มเพิ่มความเร็ว จะเพิ่มเป็นโหลดเต็ม
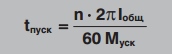
เห็นได้ชัดว่าเราต้องการปั๊มที่จะให้ค่าการไหล / เฮด (Q / H) ที่ต้องการ ซึ่งหมายความว่าจะต้องไม่อนุญาตให้มอเตอร์หยุดทำงาน และมอเตอร์จะต้องเร่งความเร็วอย่างต่อเนื่องจนกว่าจะถึงความเร็วที่กำหนด ดังนั้นจึงจำเป็นที่คุณลักษณะของแรงบิดจะตรงหรือเกินกว่าคุณลักษณะของโหลดในช่วงทั้งหมดตั้งแต่ 0% ถึง 100% ของความเร็วรอบ ช่วงเวลาที่ "มากเกินไป" เช่น ความแตกต่างระหว่างเส้นโค้งโหลดและเส้นโค้งของมอเตอร์ ใช้เป็นความเร่งในการหมุน
ความสอดคล้องของมอเตอร์ไฟฟ้ากับโหลด
หากคุณต้องการตรวจสอบว่าแรงบิดของมอเตอร์ใดตรงตามข้อกำหนดของโหลดหรือไม่ คุณสามารถเปรียบเทียบคุณลักษณะความเร็ว/แรงบิดของมอเตอร์กับคุณลักษณะความเร็ว/แรงบิดของโหลดได้ แรงบิดที่เกิดจากมอเตอร์ต้องเกินแรงบิดที่จำเป็นสำหรับโหลด รวมถึงช่วงของการเร่งความเร็วและการหมุนเต็มความเร็ว
ลักษณะของการพึ่งพาแรงบิดกับความเร็วรอบของมอเตอร์ไฟฟ้ามาตรฐานและปั๊มหอยโข่ง

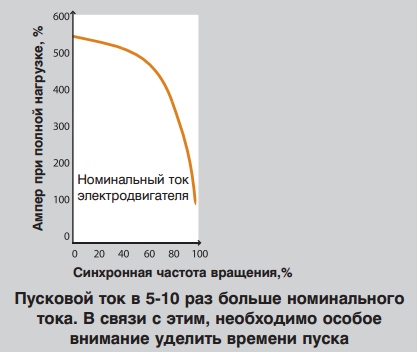
หากเราดูลักษณะเฉพาะ เราจะเห็นว่าเมื่อมอเตอร์ถูกเร่ง มอเตอร์จะเริ่มต้นที่กระแสที่สอดคล้องกับ 550% ของกระแสโหลดทั้งหมด

เมื่อมอเตอร์เข้าใกล้ความเร็วที่กำหนด กระแสไฟจะลดลง อย่างที่คุณคาดไว้ ในช่วงเริ่มต้นของการเริ่มต้น การสูญเสียของมอเตอร์จะสูง ดังนั้นช่วงเวลานี้จึงไม่ควรนานเพื่อป้องกันความร้อนสูงเกินไป
มันสำคัญมากที่ ความเร็วสูงสุดหมุนได้อย่างแม่นยำที่สุด สิ่งนี้เกี่ยวข้องกับการใช้พลังงาน ตัวอย่างเช่น ความเร็วในการหมุนเพิ่มขึ้น 1% เมื่อเทียบกับค่าสูงสุดมาตรฐาน ส่งผลให้สิ้นเปลืองพลังงานเพิ่มขึ้น 3%
การใช้พลังงานเป็นสัดส่วนกับเส้นผ่านศูนย์กลางของใบพัดปั๊มกับกำลังที่สี่
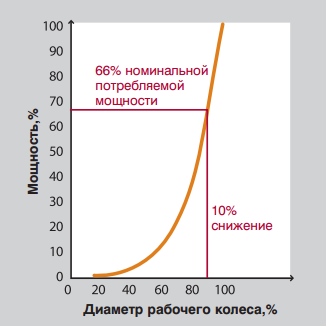
การลดขนาดเส้นผ่านศูนย์กลางของใบพัดปั๊มลง 10% จะทำให้การใช้พลังงานลดลง (1- (0.9 * 0.9 * 0.9 * 0.9)) * 100 = 34% ซึ่งเท่ากับ 66% ของกำลังไฟพิกัด การพึ่งพาอาศัยกันนี้ถูกกำหนดขึ้นในทางปฏิบัติเท่านั้น เนื่องจากขึ้นอยู่กับประเภทของปั๊ม การออกแบบใบพัด และจำนวนเงินที่คุณลดขนาดเส้นผ่านศูนย์กลางของใบพัด
เวลาสตาร์ทมอเตอร์
หากเราต้องการกำหนดขนาดมอเตอร์ไฟฟ้าสำหรับโหลดเฉพาะ เช่น ปั๊มหอยโข่ง ข้อกังวลหลักของเราคือการให้แรงบิดและกำลังที่เหมาะสม ณ จุดทำงานที่กำหนด เนื่องจากแรงบิดเริ่มต้นสำหรับปั๊มหอยโข่งค่อนข้างต่ำ เวลาสตาร์ทค่อนข้างจำกัด เนื่องจากแรงบิดค่อนข้างสูง
ไม่ใช่เรื่องแปลกที่ระบบป้องกันและควบคุมมอเตอร์ที่ซับซ้อนจะใช้เวลาสักครู่ในการสตาร์ทเพื่อให้สามารถวัดกระแสสตาร์ทของมอเตอร์ได้ เวลาเริ่มต้นของมอเตอร์และปั๊มคำนวณโดยใช้สูตรต่อไปนี้:
tstart = เวลาที่มอเตอร์ปั๊มต้องใช้เพื่อให้โหลดเต็มความเร็ว
n = ความเร็วมอเตอร์ที่โหลดเต็มที่
Itot = ความเฉื่อยที่ต้องการความเร่งเช่น ความเฉื่อยของเพลามอเตอร์ โรเตอร์ เพลาปั๊ม และใบพัด
โมเมนต์ความเฉื่อยของปั๊มและมอเตอร์สามารถดูได้จากข้อมูลทางเทคนิคที่เกี่ยวข้อง

Mizb = แรงบิดส่วนเกินที่เร่งการหมุน แรงบิดส่วนเกินจะเท่ากับแรงบิดของมอเตอร์ลบด้วยแรงบิดของปั๊มที่ความเร็วต่างๆ

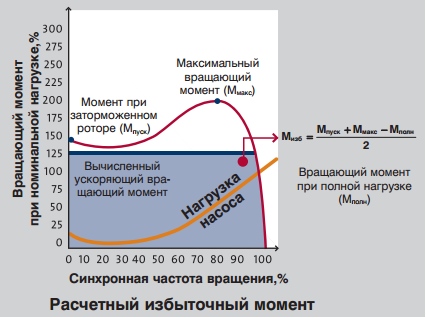
ดังที่เห็นได้จากการคำนวณข้างต้น ดำเนินการสำหรับตัวอย่างนี้ด้วยมอเตอร์ไฟฟ้า 4 กิโลวัตต์ของปั๊ม CR เวลาเริ่มต้นคือ 0.11 วินาที
จำนวนการสตาร์ทมอเตอร์ต่อชั่วโมง
ระบบควบคุมมอเตอร์ที่ซับซ้อนทันสมัยสามารถควบคุมจำนวนการสตาร์ทต่อชั่วโมงสำหรับปั๊มและมอเตอร์ที่กำหนด ความจำเป็นในการควบคุมพารามิเตอร์นี้คือทุกครั้งที่สตาร์ทมอเตอร์ด้วยการเร่งความเร็วตามมา จะมีการบริโภคสูง เริ่มต้นในปัจจุบัน. กระแสเริ่มต้นทำให้มอเตอร์ร้อนขึ้น หากมอเตอร์ไม่เย็นลง การโหลดกระแสไหลเข้าอย่างต่อเนื่องจะทำให้ขดลวดสเตเตอร์ของมอเตอร์ร้อนขึ้นอย่างมาก ส่งผลให้มอเตอร์ทำงานล้มเหลวหรืออายุการใช้งานของฉนวนลดลง
โดยปกติซัพพลายเออร์มอเตอร์จะรับผิดชอบจำนวนการสตาร์ทที่มอเตอร์สามารถทำได้ต่อชั่วโมง ตัวอย่างเช่น กรุนด์ฟอสแสดงจำนวนการสตาร์ทสูงสุดต่อชั่วโมงในเอกสารข้อมูลปั๊ม เนื่องจากจำนวนการสตาร์ทสูงสุดขึ้นอยู่กับโมเมนต์ความเฉื่อยของปั๊ม
กำลังมอเตอร์และประสิทธิภาพ (กทพ.)
มีความสัมพันธ์โดยตรงระหว่างกำลังที่มอเตอร์ไฟฟ้าใช้จากเครือข่าย กำลังที่เพลามอเตอร์ และกำลังไฮดรอลิกที่พัฒนาโดยปั๊ม
ในการผลิตปั๊ม การกำหนดต่อไปนี้ใช้สำหรับพลังงานสามประเภทที่แตกต่างกันนี้
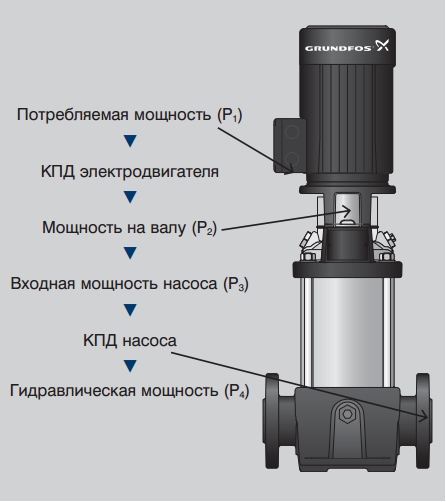
อินพุต P1 (กิโลวัตต์) พลังงานไฟฟ้าปั๊มคือกำลังที่มอเตอร์ปั๊มได้รับจากแหล่งพลังงานไฟฟ้า พาวเวอร์พี! เท่ากับกำลัง P2 หารด้วยประสิทธิภาพของมอเตอร์ไฟฟ้า
P2 (kW) กำลังเพลามอเตอร์คือกำลังที่มอเตอร์ส่งไปยังเพลาปั๊ม
P3 (kW) กำลังไฟฟ้าเข้าของปั๊ม = P2 โดยมีเงื่อนไขว่าข้อต่อระหว่างปั๊มกับเพลามอเตอร์จะไม่สูญเสียพลังงาน
P4 (kW) กำลังไฮดรอลิกของปั๊ม