พลังที่น่าประทับใจของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสซึ่งเปลี่ยนกระแสไฟฟ้าเป็นพลังงานหมุนเวียนไม่ได้ถูกสร้างขึ้นเนื่องจากส่วนประกอบทางกลใด ๆ สำหรับการหมุนอันทรงพลังดังกล่าวจะใช้เฉพาะแม่เหล็กไฟฟ้าเท่านั้นในการ "บรรจุ"
โรเตอร์มอเตอร์เหนี่ยวนำ: การออกแบบ
โรเตอร์ - องค์ประกอบของมอเตอร์ไฟฟ้าที่หมุนอยู่ภายในสเตเตอร์ (ส่วนประกอบคงที่) ซึ่งเพลาที่เชื่อมต่อกับส่วนต่างๆ ของหน่วยงาน เช่น เลื่อย กังหัน และปั๊ม แกนลามิเนตทำจากแผ่นเหล็กไฟฟ้าแต่ละแผ่นพร้อมช่องกึ่งปิดหรือเปิด
โรเตอร์ขนาดใหญ่เป็นกระบอกเหล็กแข็งที่วางอยู่ภายในสเตเตอร์ โดยมีแกนกดลงบนพื้นผิว
ไร้สัมผัส ไม่เชื่อมต่อกับภายนอกใดๆ วงจรไฟฟ้าโรเตอร์คดเคี้ยวสร้าง แรงบิดและมีสองประเภท:
- ลัดวงจร (โรเตอร์ลัดวงจร);
- เฟส (เฟสโรเตอร์)
โรเตอร์กรงกระรอก
แท่งทองแดงนำไฟฟ้าสูง (สำหรับเครื่องจักรที่มีกำลังสูง) หรือแท่งอลูมิเนียม (สำหรับเครื่องจักรที่มีกำลังต่ำ) บัดกรีหรือเทลงในพื้นผิวของแกนกลางและลัดวงจรจากปลายด้วยวงแหวนสองวงจะทำหน้าที่เป็นแม่เหล็กไฟฟ้าที่มีเสาหันไปทางสเตเตอร์ . การออกแบบนี้เรียกว่า "กรงกระรอก" ซึ่งมอบให้โดยวิศวกรไฟฟ้าชาวรัสเซีย M. O. Dolivo-Dobrovolsky
แกนม้วนไม่มีฉนวนใดๆ เนื่องจากแรงดันไฟฟ้าในขดลวดดังกล่าวเป็นศูนย์ นิยมใช้กับแท่งเครื่องยนต์ พลังปานกลางอะลูมิเนียมหลอมได้ง่าย มีความหนาแน่นต่ำและมีค่าการนำไฟฟ้าสูง เพื่อลดฮาร์โมนิกที่สูงขึ้นของแรงเคลื่อนไฟฟ้า (EMF) และกำจัดการเต้นของสนามแม่เหล็ก แท่งโรเตอร์มีมุมเอียงที่คำนวณโดยเฉพาะซึ่งสัมพันธ์กับแกนของการหมุน
ในเครื่องยนต์ที่ใช้พลังงานต่ำ ร่องแกนมักจะปิด: การแยกโรเตอร์ออกจากช่องว่างอากาศ - แผ่นเหล็กช่วยให้คุณสามารถแก้ไขขดลวดเพิ่มเติมได้ แต่ด้วยค่าความต้านทานอุปนัยที่เพิ่มขึ้นบางส่วน
เฟสโรเตอร์
มีลักษณะเป็นขดลวดสามเฟส (ในกรณีทั่วไปหลายเฟส) วางอยู่ในร่องของแกนกลางซึ่งในทางปฏิบัติไม่แตกต่างจากขดลวดสเตเตอร์ซึ่งปลายเชื่อมต่อกันตาม "ดาว" โครงการ สายไฟที่คดเคี้ยวเชื่อมต่อกับวงแหวนหน้าสัมผัสที่ยึดอยู่บนเพลาของโรเตอร์ ซึ่งเมื่อสตาร์ทเครื่องยนต์ แปรงกราไฟท์แบบอยู่กับที่หรือโลหะ-กราไฟท์ที่เชื่อมต่อกับลิโน่จะถูกกดและเลื่อน
เพื่อจำกัดการเกิดกระแสน้ำวน ฟิล์มออกไซด์ที่ใช้กับพื้นผิวของขดลวดมักจะเพียงพอ แทนที่จะใช้สารเคลือบเงาที่เป็นฉนวน
ตัวต้านทานเริ่มต้นหรือปรับสามเฟสที่เพิ่มเข้าไปในวงจรขดลวดของโรเตอร์ช่วยให้คุณเปลี่ยนได้ ความต้านทานที่ใช้งานวงจรโรเตอร์ช่วยลดกระแสเริ่มต้นขนาดใหญ่ รีโอสแตทสามารถใช้ได้:
- ลวดโลหะหรือแบบขั้นบันได - ด้วยการสลับแบบแมนนวลหรือแบบอัตโนมัติจากระดับความต้านทานหนึ่งไปอีกระดับหนึ่ง
- ของเหลว ความต้านทานซึ่งควบคุมโดยความลึกของการแช่ในอิเล็กโทรไลต์ของอิเล็กโทรด
เพื่อเพิ่มความทนทานของแปรง เฟสโรเตอร์บางรุ่นมีกลไกกรงกระรอกพิเศษที่ยกแปรงขึ้นหลังจากสตาร์ทมอเตอร์และปิดวงแหวน
มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์มีลักษณะการออกแบบที่ซับซ้อนกว่าแบบกรงกระรอก แต่ในขณะเดียวกัน ลักษณะการสตาร์ทและการควบคุมที่เหมาะสมที่สุด
หลักการทำงาน
แม่เหล็กไฟฟ้าสเตเตอร์ตั้งอยู่ใกล้กับแท่งโรเตอร์และส่งกระแสไฟฟ้าไปให้เพื่อหมุน สนามแม่เหล็กที่เกิดขึ้นในโรเตอร์จะตามมา สนามแม่เหล็กสเตเตอร์ในขณะที่ทำการหมุนทางกลของเพลาโรเตอร์และหน่วยที่เกี่ยวข้อง ในเวลาเดียวกันการเหนี่ยวนำแม่เหล็กไฟฟ้าที่สร้างขึ้นโดยขดลวดสเตเตอร์จะดันกระแสบนแท่งให้ห่างจากตัวมันเองอย่างเคร่งครัด ค่าของกระแสในแท่งเปลี่ยนแปลงตามเวลา
เขียนความคิดเห็นเพิ่มเติมในบทความบางทีฉันอาจพลาดอะไรไป ลองดูสิ ฉันจะดีใจถ้าคุณพบสิ่งอื่นที่เป็นประโยชน์ในเว็บไซต์ของฉัน ทั้งหมดที่ดีที่สุด
โดยการออกแบบ มอเตอร์แบบอะซิงโครนัสแบ่งออกเป็น ออกเป็นสองประเภทหลัก: โรเตอร์กรงกระรอก และเฟสโรเตอร์ (หลังเรียกอีกอย่างว่าเครื่องยนต์พร้อมแหวนกันลื่น) เครื่องยนต์ที่อยู่ระหว่างการพิจารณาคือมีการออกแบบสเตเตอร์เหมือนกันและแตกต่างกันเท่านั้นไขลานโรเตอร์
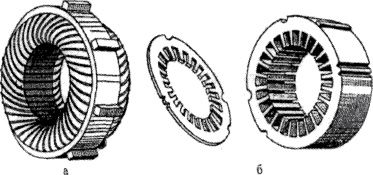
มอเตอร์กรงกระรอก บนสเตเตอร์ (รูปที่ 5.3) มีขดลวดสามเฟสซึ่งเมื่อเชื่อมต่อกับเครือข่าย กระแสไฟสามเฟสสร้างสนามแม่เหล็กหมุน ขดลวดโรเตอร์ทำในรูปของกระรอกเซลล์ถูกลัดวงจรและไม่มีข้อสรุปคือมันมี.
“กรงกระรอก” ประกอบด้วยทองแดงหรืออลูมิเนียมแท่งไฟฟ้าลัดวงจรที่ปลายด้วยวงแหวนสองวง(รูปที่ 5.4, ก)แท่งของขดลวดนี้ถูกสอดเข้าไปในร่องแกนโรเตอร์ไม่มีฉนวน ในเครื่องยนต์"กรงกระรอก" พลังงานต่ำและปานกลางทำด้วยอลูมิเนียมหลอมเหลว โลหะผสมเข้าไปในร่องของแกนโรเตอร์ (รูปที่ 5.4, ข)ร่วมกับแท่งของ "กรงกระรอก" หล่อลัดวงจรวงแหวนและปลายใบมีดเพื่อการระบายอากาศรถยนต์. อลูมิเนียมเหมาะอย่างยิ่งสำหรับจุดประสงค์นี้มีความหนาแน่น หลอมละลายได้ต่ำ และค่าการนำไฟฟ้าสูงอย่างแม่นยำ ใหญ่ในรถยนต์ช่องจ่ายไฟของโรเตอร์กรงกระรอกทำงานกึ่งปิดในเครื่องที่ใช้พลังงานต่ำ - ปิดรูปร่างร่องทั้งสองช่วยให้ตัวนำเสริมแรงได้ดีขดลวดของโรเตอร์แม้ว่าจะเพิ่มกระแสเล็กน้อยความต้านทานการกระเจิงและอุปนัยของขดลวดโรเตอร์
ในเครื่องยนต์กำลังสูงจะใช้ "กรงกระรอก" ทำด้วยแท่งทองแดงปลายเป็นรอยเป็นวงแหวนลัดวงจร (รูปที่ 5.4, c) แบบฟอร์มต่างๆช่องโรเตอร์แสดงในรูปที่ 5.4, ก.
ทางไฟฟ้า "กรงกระรอก" คือ เป็นขดลวดหลายเฟสที่ต่อกันตามแบบแผนΥ และไฟฟ้าลัดวงจร จำนวนเฟสที่คดเคี้ยว t2เท่ากับจำนวนช่องโรเตอร์z 2 และในแต่ละ
ข้าว. 5.3.อุปกรณ์มอเตอร์เหนี่ยวนำกรงกระรอก
โรเตอร์:
1 - กรอบ; 2 - แกนสเตเตอร์; 3 - แกนโรเตอร์; 4 - คดเคี้ยว
โรเตอร์ "กรงกระรอก"; 5 - ขดลวดสเตเตอร์; 6 - ใบพัดระบายอากาศ
โรเตอร์; 7 - โล่แบริ่ง; 8 - เคสพัดลม; 9 - พัดลม
เฟสรวมถึง หนึ่งคันและพื้นที่ใกล้เคียงของระยะสั้นแหวนหัก
มอเตอร์เหนี่ยวนำมักมีเฟสและสั้นโรเตอร์ปิดมีร่องบากบนสเตเตอร์ หรือโรเตอร์ ร่องเอียงทำเพื่อลดEMF ฮาร์โมนิกที่สูงขึ้นที่เกิดจากการเต้นของแม่เหล็กไหลเนื่องจากการมีอยู่ของฟัน ลดเสียงรบกวนที่เกิดจากสาเหตุแม่เหล็ก ขจัดปรากฏการณ์เกาะติดโรเตอร์กับสเตเตอร์ซึ่งบางครั้งสังเกตได้ในไมโครเครื่องยนต์
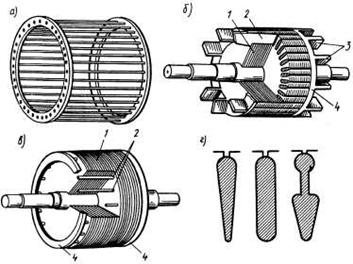
ข้าว. 5.4.การออกแบบกรงกระรอก:
1 - แกนโรเตอร์; 2 - แท่ง; 3 - ใบพัดลม; 4 - ไฟฟ้าลัดวงจร -
แหวนหลุม
มอเตอร์โรเตอร์บาดแผล(รูปที่ 5.5, ก)ขดลวดสเตเตอร์ทำในลักษณะเดียวกับมอเตอร์กรงกระรอก โรเตอร์ โรเตอร์มีขดลวดสามเฟสเหมือนกันจำนวนเสา มักจะเชื่อมต่อขดลวดโรเตอร์โครงการY สามปลายซึ่งนำไปสู่สามการติดต่อแหวน (รูปที่ 5.5, ข)หมุนด้วยเพลาเครื่องด้วยความช่วยเหลือของแปรงโลหะกราไฟท์เลื่อนไปตามคอนวงแหวนรอบ, รีโอสแตทสตาร์ทหรือบัลลาสต์รวมอยู่ในโรเตอร์ กล่าวคือ พวกมันจะใส่เข้าไปในแต่ละเฟสของโรเตอร์ ความต้านทานที่ใช้งานเพิ่มเติม
เพื่อลดการสึกหรอของวงแหวนและแปรง มอเตอร์เฟสบางครั้งมีอุปกรณ์สำหรับยกแปรงและลัดวงจรแหวนหลังจากปิดลิโน่ อย่างไรก็ตาม การแนะนำอุปกรณ์เหล่านี้มีความซับซ้อนการออกแบบมอเตอร์ไฟฟ้าและลดความน่าเชื่อถือลงบ้าง ความสมบูรณ์ของงานจึงมักใช้โครงสร้างที่แปรงสัมผัสกับหน้าสัมผัสอย่างต่อเนื่อง แหวน องค์ประกอบโครงสร้างหลักของเครื่องยนต์ด้วยเฟสโรเตอร์จะแสดงในรูปที่ 5.6.
ขอบเขตการใช้งานเครื่องยนต์ประเภทต่างๆ โดย การออกแบบมอเตอร์กรงกระรอกมอเตอร์มากขึ้นด้วยเฟสโรเตอร์และเชื่อถือได้มากขึ้นในการใช้งาน (ไม่มีวงแหวนและแปรงต้องมีการตรวจสอบอย่างเป็นระบบเป็นระยะ

ข้าว. 5.5.อุปกรณ์ของมอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์ (ก)
และรูปแบบของการรวมเข้าด้วยกัน (ข):
1 - ขดลวดสเตเตอร์ 2 - แกนสเตเตอร์; 3 - กรอบ; 4 - แกนโรเตอร์; 5 - ขดลวดโรเตอร์ 6 -เพลา; 7 แหวน; 8 - รีโอสแตทสตาร์ท
ทดแทน เป็นต้น) ข้อเสียเปรียบหลักของเครื่องยนต์เหล่านี้คือ ค่อนข้างเล็ก แรงบิดเริ่มต้นและที่สำคัญเริ่มต้นปัจจุบัน. ดังนั้นจึงใช้ในงานไฟฟ้าเหล่านั้น ไดรฟ์ที่ไม่ต้องการแรงบิดเริ่มต้นสูง(ไดรฟ์ไฟฟ้าของเครื่องจักรงานโลหะ พัดลม ฯลฯ) มอเตอร์แบบอะซิงโครนัสกำลังขนาดเล็กและไมโครมอเตอร์ยังทำงานด้วยกรงกระรอกโรเตอร์
ดังที่แสดงด้านล่าง ในมอเตอร์สลิป-ริงเป็นไปได้โดยใช้ลิโน่สตาร์ทเพื่อเพิ่มแรงบิดเริ่มต้นให้เป็นค่าสูงสุดและลดกระแสเริ่มต้น ดังนั้นเครื่องยนต์เหล่านี้สามารถใช้ขับเคลื่อนเครื่องจักรและกลไก

ข้าว. 5.6.สเตเตอร์และโรเตอร์ของมอเตอร์เหนี่ยวนำที่มีเฟสโรเตอร์:
1 - ขดลวดสเตเตอร์ 2 -กรอบ; 3 - แกนสเตเตอร์; 4 - กล่องด้วยข้อสรุป; 5 - แกนโรเตอร์; 6 - ขดลวดโรเตอร์ 7 - แหวนลื่น
ซึ่งเปิดตัวภายใต้ภาระหนัก (ไฟฟ้า ไดรฟ์ของเครื่องยก ฯลฯ )
ชื่อจริงของอุปกรณ์ไฟฟ้านี้บ่งชี้ว่าพลังงานไฟฟ้าที่จ่ายไปจะถูกแปลงเป็น การเคลื่อนที่แบบหมุนโรเตอร์ นอกจากนี้คำคุณศัพท์ "อะซิงโครนัส" ยังแสดงถึงความคลาดเคลื่อนความล่าช้าของความเร็วในการหมุนกระดองจากสนามแม่เหล็กสเตเตอร์
คำว่า "เฟสเดียว" ทำให้เกิดคำจำกัดความที่คลุมเครือ นี่เป็นเพราะความจริงที่ว่าในไฟฟ้ากำหนดปรากฏการณ์หลายประการ:
กะ ความแตกต่างของมุมระหว่างปริมาณเวกเตอร์
ตัวนำศักย์ไฟฟ้า สอง สาม หรือสี่สาย วงจรไฟฟ้ากระแสสลับ;
ขดลวดสเตเตอร์หรือโรเตอร์อย่างใดอย่างหนึ่ง มอเตอร์สามเฟสหรือเครื่องกำเนิดไฟฟ้า
ดังนั้นเราจึงชี้แจงทันทีว่าเป็นเรื่องปกติที่จะเรียกมอเตอร์ไฟฟ้าแบบเฟสเดียวที่ทำงานบนเครือข่าย AC แบบสองสายซึ่งแสดงด้วยเฟสและศักย์ศูนย์ จำนวนขดลวดที่ติดตั้งในแบบต่างๆ ของสเตเตอร์ไม่ส่งผลต่อการกำหนดนี้
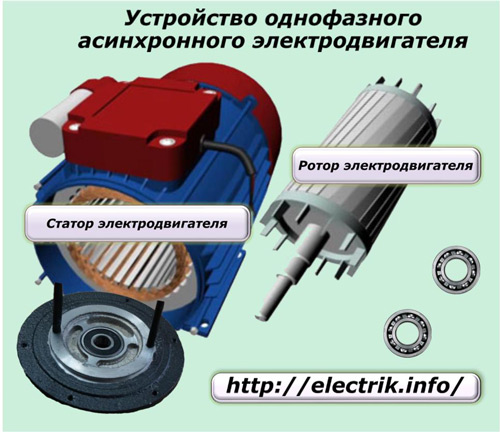
การออกแบบมอเตอร์
ตามอุปกรณ์ทางเทคนิคของคุณ มอเตอร์แบบอะซิงโครนัสประกอบด้วย:
1. สเตเตอร์ - ส่วนที่คงที่และคงที่ซึ่งทำจากร่างกายที่มีองค์ประกอบทางไฟฟ้าต่างๆ
2. โรเตอร์หมุนโดยแรงของสนามแม่เหล็กไฟฟ้าของสเตเตอร์
การเชื่อมต่อทางกลของทั้งสองส่วนนี้ทำโดยตลับลูกปืนหมุน วงแหวนด้านในซึ่งติดตั้งอยู่บนซ็อกเก็ตที่ติดตั้งของเพลาโรเตอร์ และวงแหวนรอบนอกจะติดตั้งในฝาครอบป้องกันด้านข้างที่ยึดกับสเตเตอร์
โรเตอร์
อุปกรณ์สำหรับรุ่นเหล่านี้เหมือนกับมอเตอร์แบบอะซิงโครนัสทั้งหมด: วงจรแม่เหล็กจะติดตั้งอยู่บนเพลาเหล็กที่ทำจากแผ่นลามิเนตซึ่งใช้โลหะผสมเหล็กอ่อน บนพื้นผิวด้านนอกมีการทำร่องซึ่งติดตั้งแกนม้วนที่ทำจากอลูมิเนียมหรือทองแดงซึ่งสั้นลงที่ปลายถึงวงแหวนปิด
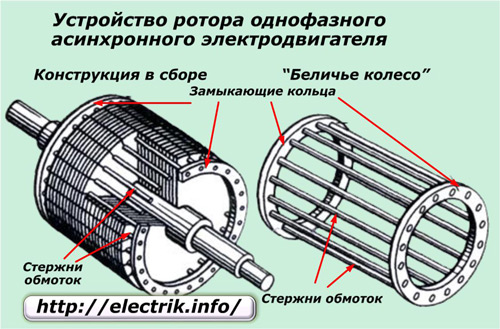
ไหลในขดลวดโรเตอร์ ไฟฟ้าที่เกิดจากสนามแม่เหล็กของสเตเตอร์และวงจรแม่เหล็กทำหน้าที่ ผ่านไปด้วยดีฟลักซ์แม่เหล็กที่สร้างขึ้นที่นี่
การออกแบบโรเตอร์แบบแยกสำหรับมอเตอร์เฟสเดียวสามารถทำจากวัสดุที่ไม่ใช่แม่เหล็กหรือเฟอร์โรแมกเนติกในรูปของกระบอกสูบ
สเตเตอร์
การออกแบบสเตเตอร์ยังนำเสนอ:
ร่างกาย;
วงจรแม่เหล็ก
คดเคี้ยว
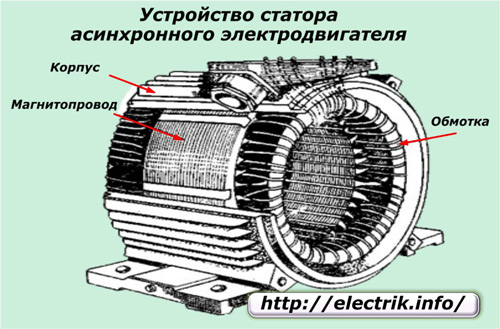
วัตถุประสงค์หลักคือเพื่อสร้างสนามแม่เหล็กไฟฟ้าเคลื่อนที่หรือหมุนได้
ขดลวดสเตเตอร์มักจะประกอบด้วยสองวงจร:
1. คนงาน;
2. ลอนเชอร์
สำหรับการออกแบบที่เรียบง่ายที่สุด ซึ่งออกแบบมาสำหรับการคลายกระดองแบบแมนนวล สามารถทำขดลวดได้เพียงอันเดียวเท่านั้น
หลักการทำงานของมอเตอร์ไฟฟ้าเฟสเดียวแบบอะซิงโครนัส
เพื่อให้การนำเสนอของวัสดุง่ายขึ้น ให้ลองจินตนาการว่าการพันของสเตเตอร์นั้นทำมาจากการวนรอบเพียงครั้งเดียว สายไฟภายในสเตเตอร์จะเคลื่อนที่เป็นวงกลม 180 องศาเชิงมุม กระแสสลับไซน์ไหลผ่านโดยมีครึ่งคลื่นบวกและลบ มันไม่ได้สร้างสนามแม่เหล็กหมุนวน แต่เป็นสนามแม่เหล็กที่เร้าใจ
สนามแม่เหล็กเกิดขึ้นได้อย่างไร
ให้เราวิเคราะห์กระบวนการนี้โดยใช้ตัวอย่างการไหลของกระแสครึ่งคลื่นที่เป็นบวก ณ เวลา t1, t2, t3
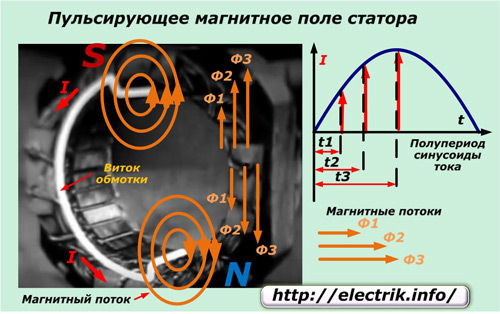
มันวิ่งไปตามส่วนบนของตัวนำเข้าหาเราและตามส่วนล่างออกไปจากเรา ในระนาบตั้งฉากที่แสดงโดยวงจรแม่เหล็ก ฟลักซ์แม่เหล็ก F เกิดขึ้นรอบตัวนำ
กระแสที่เปลี่ยนแปลงในแอมพลิจูดในช่วงเวลาที่พิจารณาทำให้เกิดสนามแม่เหล็กไฟฟ้าที่มีขนาดต่างกัน F1, F2, F3 เนื่องจากกระแสในครึ่งบนและครึ่งล่างเท่ากัน แต่ขดลวดงอ ฟลักซ์แม่เหล็กของแต่ละส่วนจะพุ่งไปในทิศทางตรงกันข้ามและยกเลิกการกระทำของกันและกัน คุณสามารถกำหนดสิ่งนี้ได้โดยกฎของกิมเล็ตหรือมือขวา
อย่างที่คุณเห็นด้วยครึ่งคลื่นของการหมุนบวก สนามแม่เหล็กจะไม่ถูกสังเกต แต่มีเพียงการเต้นของสนามแม่เหล็กที่เกิดขึ้นในส่วนบนและส่วนล่างของเส้นลวด ซึ่งมีความสมดุลกันในวงจรแม่เหล็กเช่นกัน กระบวนการเดียวกันนี้เกิดขึ้นในส่วนลบของไซนัส เมื่อกระแสน้ำเปลี่ยนทิศทางไปทางตรงกันข้าม
เนื่องจากไม่มีสนามแม่เหล็กที่หมุนได้ โรเตอร์จะยังคงอยู่กับที่ เนื่องจากไม่มีแรงใดๆ ที่ใช้กับโรเตอร์เพื่อเริ่มหมุน
วิธีสร้างการหมุนของโรเตอร์ในสนามที่เร้าใจ
หากตอนนี้เราให้การหมุนของโรเตอร์ แม้ว่าจะด้วยมือ มันก็จะเคลื่อนที่ต่อไป
เพื่ออธิบายปรากฏการณ์นี้ เราแสดงให้เห็นว่าฟลักซ์แม่เหล็กทั้งหมดเปลี่ยนความถี่ของไซนูซอยด์ปัจจุบันจากศูนย์เป็นค่าสูงสุดในแต่ละครึ่งรอบ (โดยเปลี่ยนทิศทางเป็นตรงกันข้าม) และประกอบด้วยสองส่วนที่เกิดขึ้นในส่วนบน และกิ่งล่าง ดังรูป
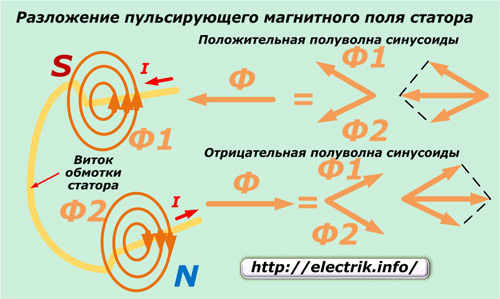
สนามเร้าใจแม่เหล็กของสเตเตอร์ประกอบด้วยวงกลมสองอันที่มีแอมพลิจูด Фmax/2 และเคลื่อนที่ไปในทิศทางตรงกันข้ามด้วยความถี่เดียวกัน
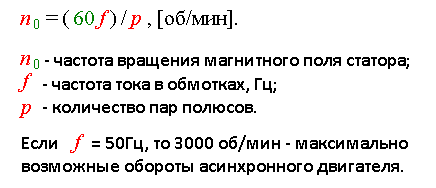
npr=nrev=f60/p=1.
สูตรนี้บ่งชี้:
npr และ nrev ของความถี่การหมุนของสนามแม่เหล็กสเตเตอร์ในทิศทางไปข้างหน้าและย้อนกลับ
n1 คือความเร็วของฟลักซ์แม่เหล็กหมุน (rpm);
p คือจำนวนคู่ของเสา
f คือความถี่ของกระแสในขดลวดสเตเตอร์
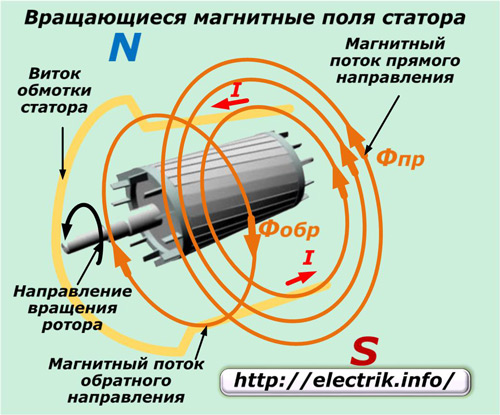
ตอนนี้เราจะให้มอเตอร์หมุนด้วยมือในทิศทางเดียว และมันจะรับการเคลื่อนไหวทันทีเนื่องจากการเกิดโมเมนต์การหมุนที่เกิดจากการเลื่อนของโรเตอร์ที่สัมพันธ์กับฟลักซ์แม่เหล็กที่แตกต่างกันของทิศทางไปข้างหน้าและย้อนกลับ
ให้เราสมมติว่าฟลักซ์แม่เหล็กของทิศทางไปข้างหน้าพร้อมกับการหมุนของโรเตอร์และการหมุนกลับตามลำดับจะตรงกันข้าม หากเราแสดงด้วย n2 ความถี่ของการหมุนของกระดองใน rpm เราก็สามารถเขียนนิพจน์ n2 ได้< n1.
ในกรณีนี้ เราแสดงว่า Spr \u003d (n1-n2) / n1 \u003d S.
ที่นี่ดัชนี S และ Spr คือสลิปของมอเตอร์เหนี่ยวนำและโรเตอร์ของฟลักซ์แม่เหล็กสัมพัทธ์ของทิศทางไปข้างหน้า
สำหรับการไหลย้อนกลับ Srev แบบเลื่อนจะแสดงด้วยสูตรที่คล้ายกัน แต่มีการเปลี่ยนแปลงเครื่องหมาย n2
Srev \u003d (n1 - (-n2)) / n1 \u003d 2-Spr.
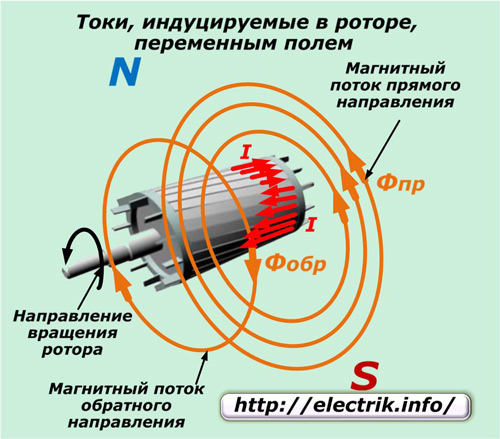
ตามกฎของการเหนี่ยวนำแม่เหล็กไฟฟ้าภายใต้การกระทำของฟลักซ์แม่เหล็กโดยตรงและย้อนกลับแรงเคลื่อนไฟฟ้าจะเริ่มกระทำในขดลวดโรเตอร์ซึ่งจะสร้างกระแสในทิศทางเดียวกัน I2pr และ I2arr
ความถี่ (เป็นเฮิรตซ์) จะเป็นสัดส่วนโดยตรงกับปริมาณสลิป
f2pr=f1∙Spr;
f2rev=f1∙Srev.
นอกจากนี้ความถี่ f2rev ซึ่งเกิดจากกระแสเหนี่ยวนำ I2rev นั้นสูงกว่าความถี่ f2rev อย่างมาก
ตัวอย่างเช่น มอเตอร์ไฟฟ้ากำลังทำงานบนเครือข่าย 50 Hz ที่มี n1=1500 และ n2=1440 rpm โรเตอร์มีสลิปสัมพันธ์กับทิศทางฟลักซ์แม่เหล็กไปข้างหน้า Spr=0.04 และความถี่กระแส f2pr=2 Hz สลิปย้อนกลับ Srev=1.96 และความถี่ปัจจุบัน f2rev=98 Hz
ตามกฎของ Ampère เมื่อ I2pr ปัจจุบันทำปฏิกิริยากับสนามแม่เหล็ก Фpr แรงบิด Mpr จะปรากฏขึ้น
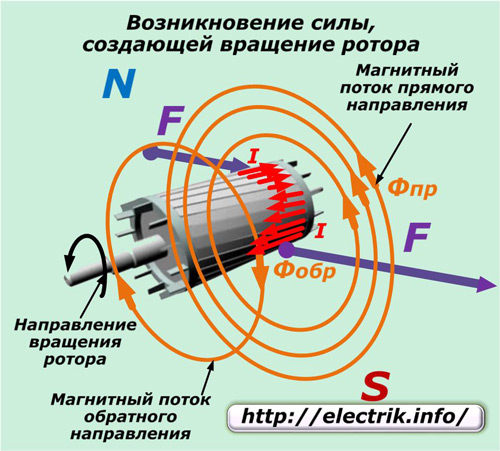
Mpr \u003d ซม. ∙ Fpr ∙ I2pr ∙cosφ2pr.
ที่นี่ค่าของสัมประสิทธิ์คงที่ cM ขึ้นอยู่กับการออกแบบของเครื่องยนต์
ในกรณีนี้ Mobr ฟลักซ์แม่เหล็กแบบย้อนกลับยังทำหน้าที่ซึ่งคำนวณโดยนิพจน์:
Mobr \u003d ซม. ∙ Fabr ∙ I2 arr ∙ cosφ2 arr.
อันเป็นผลมาจากการโต้ตอบของทั้งสองโฟลว์ อันผลลัพธ์จะปรากฏขึ้น:
M= Mpr-Mobr.
ความสนใจ! เมื่อโรเตอร์หมุน จะเกิดกระแสที่มีความถี่ต่างกัน ซึ่งสร้างโมเมนต์ของแรงที่มีทิศทางต่างกัน ดังนั้นเกราะของมอเตอร์จะหมุนภายใต้การกระทำของสนามแม่เหล็กที่เต้นเป็นจังหวะในทิศทางที่มันเริ่มหมุน
ในระหว่างการเอาชนะโหลดที่กำหนดโดยมอเตอร์เฟสเดียว สลิปขนาดเล็กจะถูกสร้างขึ้นด้วยส่วนแบ่งหลักของ Mpr แรงบิดโดยตรง การตอบโต้ของการเบรกและสนามแม่เหล็กย้อนกลับ Mobr มีผลกระทบน้อยมากเนื่องจากความแตกต่างในความถี่ของกระแสของทิศทางไปข้างหน้าและทิศทางย้อนกลับ
f2กระแสย้อนกลับอย่างมีนัยสำคัญเกิน f2reverse และ X2rev รีแอกแตนซ์เชิงอุปนัยที่สร้างขึ้นนั้นเกินส่วนประกอบที่ใช้งานอย่างมากและให้เอฟเฟกต์ล้างอำนาจแม่เหล็กขนาดใหญ่ของฟลักซ์แม่เหล็กย้อนกลับ Fobre ซึ่งลดลงในที่สุด
เนื่องจากตัวประกอบกำลังของมอเตอร์ภายใต้โหลดมีขนาดเล็ก ฟลักซ์แม่เหล็กย้อนกลับจึงไม่สามารถทำได้ ผลกระทบที่แข็งแกร่งบนโรเตอร์หมุน
เมื่อเฟสหนึ่งของเครือข่ายถูกป้อนไปยังมอเตอร์ที่มีโรเตอร์คงที่ (n2=0) การเลื่อนไปข้างหน้าและย้อนกลับจะเท่ากับหนึ่ง และสนามแม่เหล็กและแรงของการไหลไปข้างหน้าและย้อนกลับจะสมดุลและการหมุนไม่สมดุล เกิดขึ้น. ดังนั้นจึงเป็นไปไม่ได้ที่จะคลายเกราะของมอเตอร์ไฟฟ้าจากการจ่ายเฟสเดียว
วิธีกำหนดความเร็วของเครื่องยนต์อย่างรวดเร็ว:
การหมุนของโรเตอร์เกิดขึ้นได้อย่างไรในมอเตอร์แบบอะซิงโครนัสแบบเฟสเดียว
ตลอดประวัติการใช้งานอุปกรณ์ดังกล่าว ได้มีการพัฒนาโซลูชันการออกแบบต่อไปนี้:
1. การหมุนเพลาด้วยมือหรือสายไฟ
2. การใช้ขดลวดเพิ่มเติมที่เชื่อมต่อในขณะที่เปิดตัวเนื่องจากความต้านทานโอห์มมิกคาปาซิทีฟหรืออุปนัย
3. แยกโดยขดลวดแม่เหล็กลัดวงจรของวงจรแม่เหล็กสเตเตอร์
วิธีแรกใช้ในการพัฒนาเบื้องต้นและไม่ได้ใช้อีกต่อไปเนื่องจากอาจเสี่ยงต่อการบาดเจ็บในระหว่างการปล่อย แม้ว่าจะไม่ต้องใช้โซ่เพิ่มเติมเพื่อเชื่อมต่อ
การใช้ขดลวดเปลี่ยนเฟสในสเตเตอร์
เพื่อให้การหมุนเริ่มต้นของโรเตอร์กับขดลวดสเตเตอร์นอกจากนี้ในขณะที่เปิดตัวอุปกรณ์ช่วยอีกอันหนึ่งเชื่อมต่ออยู่ แต่ขยับมุมเพียง 90 องศาเท่านั้น ทำด้วยลวดที่หนากว่าเพื่อส่งกระแสน้ำที่มากกว่ากระแสที่ไหลในสายงาน
แผนภาพการเชื่อมต่อของมอเตอร์ดังกล่าวแสดงในรูปด้านขวา

ที่นี่ใช้ปุ่มประเภท PNVS เพื่อเปิดซึ่งออกแบบมาเป็นพิเศษสำหรับเครื่องยนต์ดังกล่าวและมีการใช้กันอย่างแพร่หลายในการทำงานของเครื่องซักผ้าที่ผลิตในสหภาพโซเวียต ปุ่มนี้จะเปิดผู้ติดต่อ 3 ทันทีในลักษณะที่หลังจากกดและปล่อย สุดขั้วทั้งสองยังคงอยู่ในสถานะเปิด และปุ่มตรงกลางปิดเป็นเวลาสั้น ๆ แล้วกลับสู่ตำแหน่งเดิมภายใต้การกระทำของ ฤดูใบไม้ผลิ.
ปิดผู้ติดต่อสุดขีดได้โดยการกดปุ่ม "หยุด" ที่อยู่ติดกัน

นอกจากสวิตช์ปุ่มกด ในการปิดใช้งานการไขลานเพิ่มเติมในโหมดอัตโนมัติ ยังใช้สิ่งต่อไปนี้:
1. สวิตช์แรงเหวี่ยง
2. รีเลย์ส่วนต่างหรือกระแส
เพื่อปรับปรุงการสตาร์ทเครื่องยนต์ภายใต้ภาระ มีการใช้องค์ประกอบเพิ่มเติมในการไขลานแบบเปลี่ยนเฟส
ในวงจรดังกล่าว ความต้านทานโอห์มมิกจะถูกติดตั้งเป็นอนุกรมกับขดลวดเพิ่มเติมของสเตเตอร์ ในกรณีนี้การม้วนของการหมุนจะดำเนินการในลักษณะ bifilar ซึ่งทำให้มั่นใจได้ว่าค่าสัมประสิทธิ์การเหนี่ยวนำตนเองของขดลวดนั้นใกล้เคียงกับศูนย์มาก
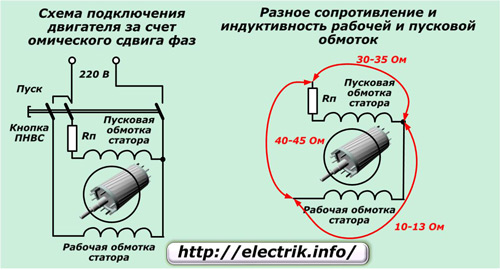
เนื่องจากการใช้เทคนิคทั้งสองนี้ เมื่อกระแสไหลผ่านขดลวดที่ต่างกัน การเปลี่ยนเฟสของลำดับ 30 องศาจึงเกิดขึ้นระหว่างกัน ซึ่งก็เพียงพอแล้ว ความแตกต่างของมุมถูกสร้างขึ้นโดยการเปลี่ยนความต้านทานเชิงซ้อนในแต่ละวงจร
ด้วยวิธีนี้อาจจะ เริ่มคดเคี้ยวมีความเหนี่ยวนำต่ำและมีความต้านทานสูง สำหรับสิ่งนี้จะใช้การพันด้วยลวดจำนวนเล็กน้อยของส่วนตัดขวางที่ประเมินค่าต่ำไป
การเปลี่ยนเฟสแบบ Capacitive ของกระแสช่วยให้คุณสร้างการเชื่อมต่อระยะสั้นของขดลวดด้วยตัวเก็บประจุที่เชื่อมต่อแบบอนุกรม วงจรนี้ใช้งานได้เฉพาะในขณะที่เครื่องยนต์อยู่ในโหมดแล้วดับลง
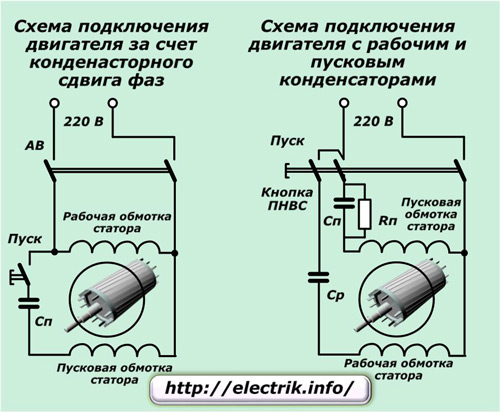
การสตาร์ทแบบ Capacitive ทำให้เกิดแรงบิดและตัวประกอบกำลังที่สูงกว่าการสตาร์ทแบบต้านทานหรือแบบอุปนัย สามารถเข้าถึง 45 ÷ 50% ของค่าเล็กน้อย
ในวงจรแยกไปยังห่วงโซ่ การทำงานที่คดเคี้ยวซึ่งเปิดอยู่ตลอดเวลายังเพิ่มความจุอีกด้วย ด้วยเหตุนี้ กระแสในขดลวดจึงเบี่ยงเบนโดยมุมของลำดับ π/2 ในเวลาเดียวกัน การเปลี่ยนแปลงสูงสุดของแอมพลิจูดจะสังเกตเห็นได้ชัดเจนในสเตเตอร์ ซึ่งให้แรงบิดที่ดีบนเพลา
ด้วยเทคนิคนี้ เครื่องยนต์จึงสามารถผลิตได้ พลังงานมากขึ้น. อย่างไรก็ตาม วิธีนี้ใช้เฉพาะกับไดรฟ์ที่สตาร์ทหนักเท่านั้น เช่น เพื่อหมุนดรัม เครื่องซักผ้าเต็มไปด้วยผ้าลินินด้วยน้ำ
การเริ่มต้นของตัวเก็บประจุช่วยให้คุณเปลี่ยนทิศทางการหมุนของกระดองได้ ในการทำเช่นนี้เพียงเปลี่ยนขั้วของการเชื่อมต่อของการเริ่มต้นหรือการทำงานที่คดเคี้ยว
การเชื่อมต่อ มอเตอร์เฟสเดียวมีเสาแยก
ในมอเตอร์แบบอะซิงโครนัสที่มีกำลังเล็กน้อยประมาณ 100 W การแยกของฟลักซ์แม่เหล็กของสเตเตอร์จะถูกใช้เนื่องจากการรวมขดลวดทองแดงลัดวงจรในขั้วของวงจรแม่เหล็ก
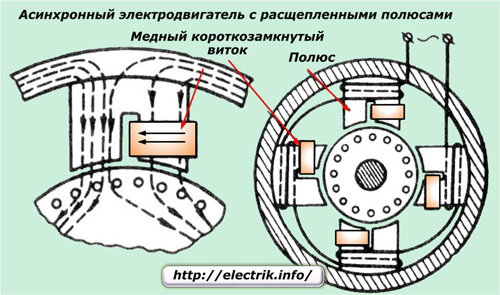
เสาดังกล่าวที่ถูกตัดออกเป็นสองส่วนจะสร้างสนามแม่เหล็กเพิ่มเติม ซึ่งจะเปลี่ยนจากแกนหลักไปตามมุมและทำให้อ่อนลงในบริเวณที่ขดลวดปกคลุม สิ่งนี้สร้างสนามหมุนวงรีที่สร้างแรงบิดของทิศทางคงที่
ในการออกแบบดังกล่าว เราสามารถพบตัวแบ่งแม่เหล็กที่ทำจากแผ่นเหล็กที่ปิดขอบของส่วนปลายของเสาสเตเตอร์
เครื่องยนต์ที่มีการออกแบบที่คล้ายกันสามารถพบได้ในอุปกรณ์พัดลมสำหรับเป่าลม พวกเขาไม่มีความสามารถในการย้อนกลับ
ทฤษฎีแม่เหล็กไฟฟ้าซึ่งเป็นหัวใจสำคัญของกระบวนการที่เกิดขึ้นใน มอเตอร์ไฟฟ้าซับซ้อนเกินไป ดังนั้น เพื่อให้เข้าใจหลักการทำงานของมอเตอร์ไฟฟ้าโดยทั่วไป คำอธิบายแบบง่ายของพื้นฐานทางทฤษฎีก็เพียงพอแล้ว
เพื่อการเปลี่ยนแปลงอย่างต่อเนื่องเพื่อทำความเข้าใจการเปลี่ยนแปลง พลังงานไฟฟ้าเป็นกลไกจำเป็นต้องรีเฟรชหน่วยความจำของแนวคิดพื้นฐานจาก หลักสูตรโรงเรียนฟิสิกส์:
- รอบตัวนำที่พันบนขดลวด เมื่อกระแสไฟฟ้าตรงไหลเข้าไปข้างใน จะเกิดสนามแม่เหล็กไฟฟ้าที่มีลักษณะเหมือนกันกับสนามแม่เหล็กทั่วไป
- แกนของเหล็กและโลหะผสมที่วางอยู่ภายในขดลวดช่วยปรับปรุงการไหลของฟลักซ์แม่เหล็กไฟฟ้าซึ่งช่วยเพิ่มปฏิสัมพันธ์แม่เหล็ก
- กระแสสลับในขดลวดจะทำการแม่เหล็กซ้ำที่แกนกลางอย่างต่อเนื่อง เรียกว่า วงจรแม่เหล็ก ซึ่งทำจากเหล็กแม่เหล็กไฟฟ้าชนิดพิเศษ
- การเคลื่อนที่ของตัวนำข้ามเส้นแม่เหล็กทำให้เกิดแรงเคลื่อนไฟฟ้า (EMF) ในนั้น
- ฟลักซ์แม่เหล็กจะถูกส่งผ่านระหว่างวงจรแม่เหล็กสองวงจรผ่านช่องว่างอากาศขนาดเล็ก
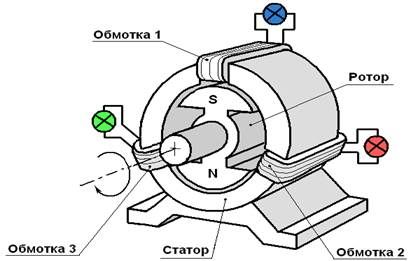
หลักการทำงานของสเตเตอร์
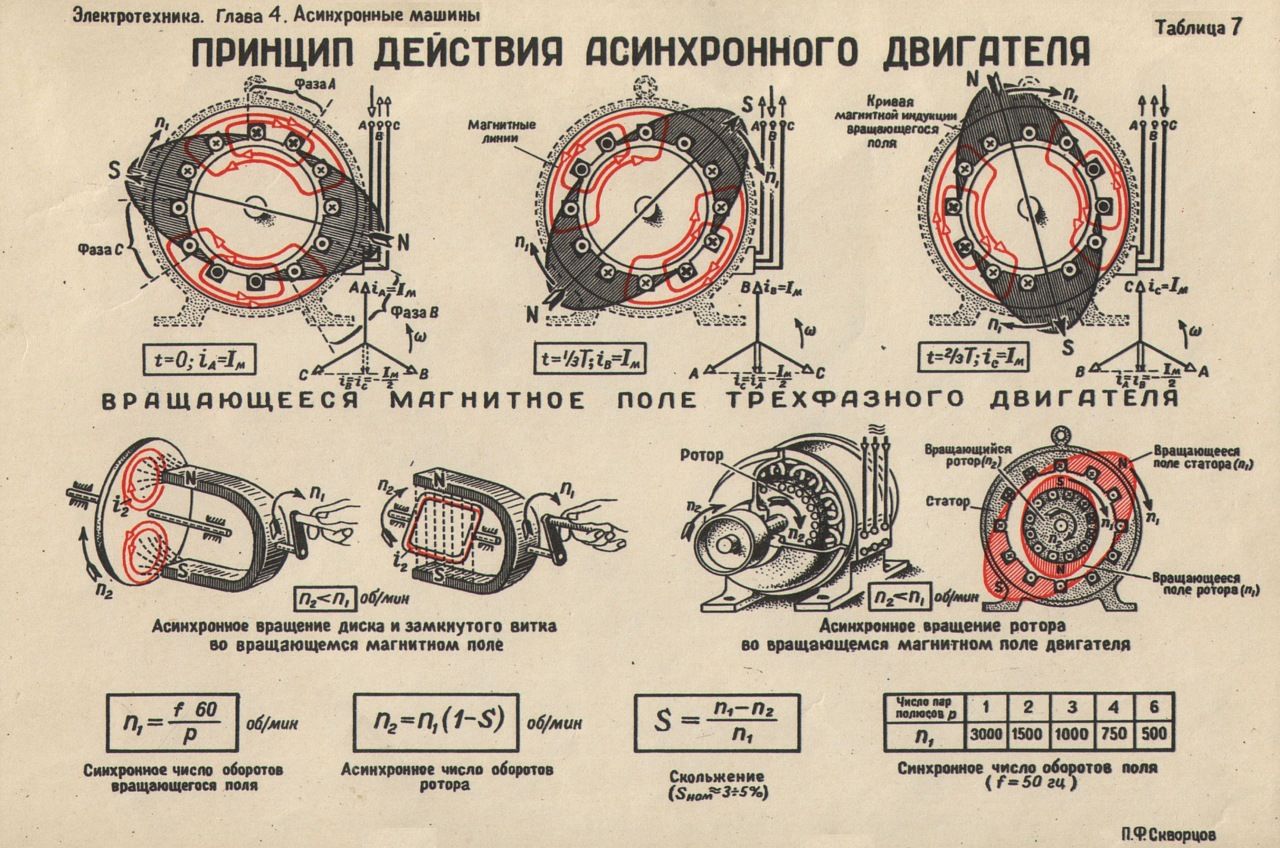
ขดลวดของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสเรียกว่าขดลวดซึ่งอยู่ในร่องของสเตเตอร์ มอเตอร์แบบอะซิงโครนัสสามเฟสมีขดลวดเฟสเดียวกัน วางขนานกันอย่างสมมาตร และแกนของมอเตอร์เหล่านี้ทำมุม120º
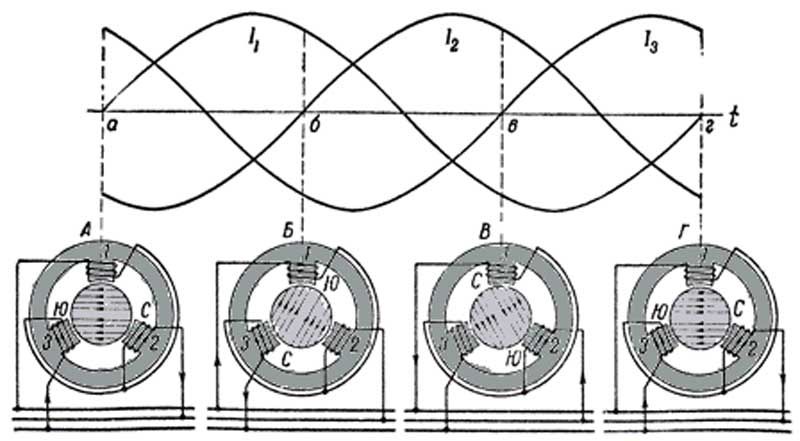
คลื่นไซน์ของแต่ละเฟสที่คดเคี้ยวของมอเตอร์
ดังที่คุณทราบ ไซนูซอยด์ของกระแสของแต่ละเฟส สัมพันธ์กับเฟสก่อนหน้า ถูกเปลี่ยนโดยหนึ่งในสามของคาบ เนื่องจากความแรงของฟลักซ์แม่เหล็กในขดลวดเปลี่ยนแปลงไปตามหลักการเดียวกัน โดยการเพิ่มเวกเตอร์ทิศทางของสนามแม่เหล็กไฟฟ้าที่จุดเดียวในเวลา คุณจะได้รับฟลักซ์แม่เหล็กทั้งหมด
การเพิ่มเวกเตอร์เหล่านี้ในช่วงเวลาต่างๆ ของคาบ คุณจะเห็นว่าทิศทางของฟลักซ์แม่เหล็กทั้งหมดหมุนพร้อมกันกับความผันผวนของกระแส ข้อมูลการหมุนของฟลักซ์แม่เหล็กสามารถดูได้ว่าเป็นแม่เหล็กเกือกม้าถาวรที่หมุนได้
ดังนั้นหลักการทำงานของมอเตอร์กระแสสลับ (ซิงโครนัสหรืออะซิงโครนัส) คือการสร้างสนามแม่เหล็กไฟฟ้าที่หมุนได้ของสเตเตอร์
หลักการหมุนแบบซิงโครนัส
หากสำหรับการทดลอง แม่เหล็กรูปเกือกม้าติดอยู่กับแกนของการหมุน วัตถุโลหะใดๆ ที่ยึดระหว่างเสาบนแกนอิสระจะเคลื่อนที่พร้อมกัน มันจะมีเหตุผลที่จะวางไว้ตรงกลางของสเตเตอร์ด้วย ขดลวดสามเฟสโรเตอร์ในรูปแบบ แม่เหล็กถาวรเพื่อให้ได้มอเตอร์ซิงโครนัส
มอเตอร์ซิงโครนัส
แต่ถึงแม้จะใช้แม่เหล็กสมัยใหม่อันทรงพลัง แต่กระแสน้ำวนที่เกิดจากสนามแม่เหล็กไฟฟ้ากระแสสลับจะทำให้โรเตอร์ร้อน ซึ่งจะทำให้คุณสมบัติทางแม่เหล็กของมันหายไป ซึ่งขึ้นอยู่กับอุณหภูมิของแม่เหล็กถาวร สำหรับสเตเตอร์ ปัญหานี้แก้ไขได้ด้วยการประกอบแกนในรูปของเพลตจากเหล็กไฟฟ้าชนิดพิเศษ
สเตเตอร์ประกอบจากแผ่นเหล็กไฟฟ้า a) มุมมองที่ประกอบขึ้น b) ตัวสเตเตอร์เอง
เป็นไปไม่ได้ที่จะประกอบโรเตอร์ในรูปแบบของแม่เหล็กถาวรแบบแผ่น ดังนั้น จึงใช้ขดลวดกระตุ้นซึ่งเป็นแม่เหล็กไฟฟ้าถาวร หลักการทำงานของมอเตอร์ไฟฟ้านี้เป็นแบบซิงโครนัส - เพลาโรเตอร์เคลื่อนที่พร้อมกันกับสนามแม่เหล็กไฟฟ้าของสเตเตอร์ซึ่งอยู่ในการหมุน
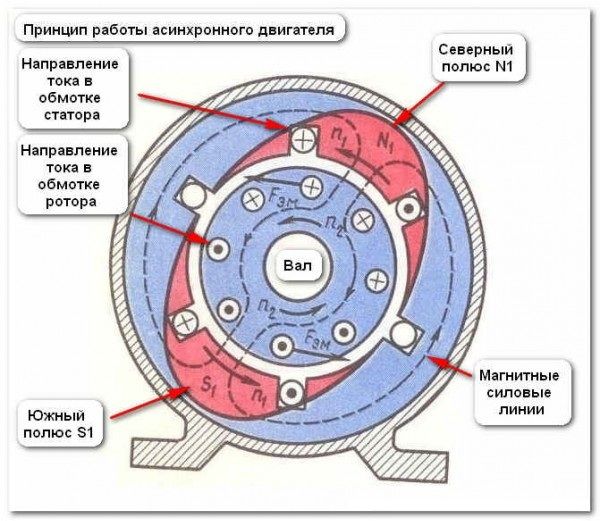
หลักการทำงานของมอเตอร์เหนี่ยวนำ
ในมอเตอร์เหนี่ยวนำแบบกรงกระรอก จำเป็นต้องเน้นจุดสำคัญสองจุด:
- การเหนี่ยวนำกระแสไฟฟ้าในการลัดวงจรของขดลวดโรเตอร์เนื่องจากสนามแม่เหล็กไฟฟ้าที่หมุนของสเตเตอร์
- การเกิดขึ้นของฟลักซ์แม่เหล็กของขดลวดโรเตอร์ซึ่งมีปฏิสัมพันธ์กับสนามแม่เหล็กที่หมุนของสเตเตอร์
จำเป็นต้องพิจารณากระบวนการของการเกิดขึ้นของสนามแม่เหล็กของโรเตอร์ตั้งแต่วินาทีที่เครื่องยนต์สตาร์ท สนามแม่เหล็กไฟฟ้าของสเตเตอร์เริ่มหมุนทันทีหลังจากที่แรงดันไฟฟ้าถูกนำไปใช้กับขดลวดสเตเตอร์ เพลาโรเตอร์อยู่ในเวลานี้หยุดนิ่งและเกิดการเหนี่ยวนำขึ้น กระแสสลับด้วยความถี่การหมุนของสนาม
ในแต่ละช่วงเวลา เมื่อขั้วของสนามแม่เหล็กไฟฟ้าที่หมุนได้เคลื่อนเข้าใกล้ขดลวดไฟฟ้าลัดวงจรเดี่ยว สนามแม่เหล็กที่มีปฏิสัมพันธ์จะถูกสร้างขึ้นในนั้น ซึ่งมักจะดึงดูดขดลวดของโรเตอร์ตามเสาถอยของสนามแม่เหล็กไฟฟ้าที่กำลังเคลื่อนที่
กระบวนการเหล่านี้เกิดขึ้นในขดลวดลัดวงจรทั้งหมดระหว่างการหมุนของสนามรอบ ๆ เนื่องจากโมเมนต์การหมุนทั้งหมดของเพลาโรเตอร์จะปรากฏขึ้น ดังนั้นหลักการทำงานของมอเตอร์ไฟฟ้า ประเภทอะซิงโครนัสประกอบด้วยปฏิสัมพันธ์ของสนามแม่เหล็กไฟฟ้าของสเตเตอร์และโรเตอร์
เอฟเฟกต์การเลื่อน
เมื่อเพลามอเตอร์เร็วขึ้น ความถี่ของจุดตัดของโรเตอร์ที่ลัดวงจรจะเปลี่ยน เส้นแรงฟลักซ์แม่เหล็กหมุนจะลดลง เพลามอเตอร์มักจะไล่ตามสนามหมุน
แต่ทันทีที่เพลาโรเตอร์และสนามสเตเตอร์หยุดนิ่งโดยสัมพันธ์กัน การลัดวงจรจะไม่ข้ามเส้นสนามแม่เหล็กไฟฟ้าอีกต่อไป ซึ่งหมายความว่าจะไม่มีกระแสไฟฟ้าเกิดขึ้น การหายไปของ EMF ในการหมุนของโรเตอร์จะทำให้แรงบิดสูญเสียไป สถานะของมอเตอร์นี้เรียกว่ารอบเดินเบาในอุดมคติ
แต่ในสภาพจริงแรงเสียดทานจะทำให้เกิดการสูญเสียความเฉื่อยและโรเตอร์ของมอเตอร์ไฟฟ้าจะล่าช้าตามสนามสเตเตอร์ที่กำลังหมุนอยู่ซึ่งจะทำให้เกิด EMF ในการหมุนลัดวงจรอันเนื่องมาจาก จุดตัดของเส้นแรงสนามแม่เหล็ก
เอฟเฟกต์นี้เรียกว่าสลิปของโรเตอร์ที่สัมพันธ์กับสนามสเตเตอร์ซึ่งมันไม่สามารถปักหลักและหมุนพร้อมกันได้
ดังนั้นมอเตอร์ดังกล่าวจึงเรียกว่าอะซิงโครนัส (ไม่ซิงโครนัส) กล่าวอีกนัยหนึ่งหลักการทำงานของมอเตอร์ที่มีโรเตอร์กรงกระรอกคือเอฟเฟกต์การลื่นซึ่งจำเป็นสำหรับการเกิดขึ้นของ EMF ในการหมุนของโรเตอร์
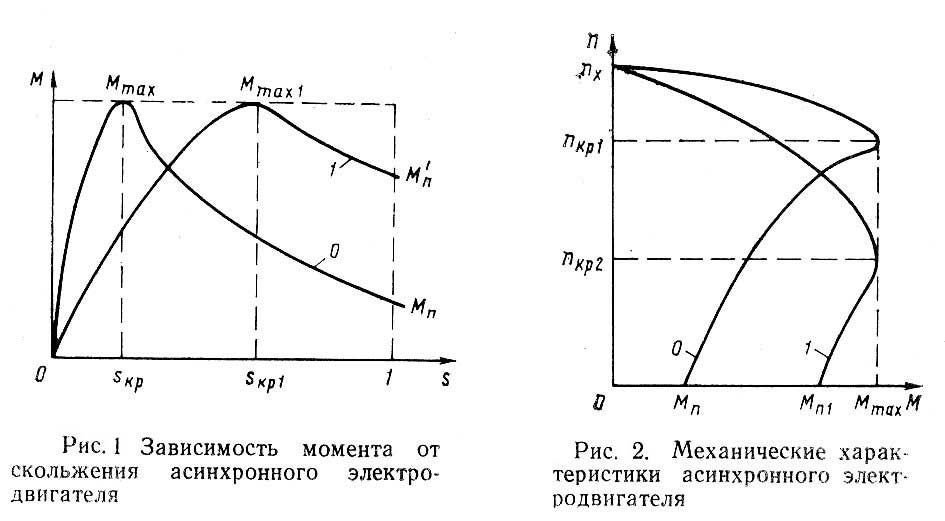
โหมดเลื่อนที่เหมาะสมที่สุด
เป็นที่ชัดเจนว่า EMF สูงสุดในการหมุนลัดวงจรจะเกิดขึ้นในขณะที่เปิดตัว แต่วงจรแม่เหล็กโรเตอร์แบบเคลือบไม่ได้ถูกออกแบบมาสำหรับการกลับตัวเป็นแม่เหล็กบ่อยครั้งเช่นนี้ ดังนั้น ในโหมดนี้ ประสิทธิภาพของมอเตอร์ไฟฟ้าและ แรงบิดจะต่ำ
ในทางกลับกัน เมื่อเข้าใกล้การเคลื่อนที่แบบซิงโครนัสของเพลาโรเตอร์และสนามสเตเตอร์ EMF จะเข้าใกล้ศูนย์ ซึ่งจะนำไปสู่การหายไปของช่วงเวลาเช่นกัน นั่นเป็นเหตุผลที่ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสโดยการลัดวงจรของโรเตอร์จะคำนวณในลักษณะที่สัมประสิทธิ์การลื่น
เท่ากับ 2÷5% ภายในข้อจำกัดเหล่านี้ ลักษณะของมอเตอร์จะสูงสุด