อะซิงโครนัส มอเตอร์กรงกระรอกง่ายมากในการออกแบบ มีความน่าเชื่อถือในการใช้งานสูง ต้นทุนการผลิตและการซ่อมแซมต่ำ ขนาดและน้ำหนักโดยรวมที่เล็กกว่าเมื่อเทียบกับมอเตอร์ไฟฟ้า กระแสตรงไม่ต้องการการดูแลเป็นพิเศษ ยกเว้นการสังเกตแบริ่ง ฉนวน ข้อต่อสัมผัส และมีคุณสมบัติการยึดเกาะที่น่าพอใจ ด้วยการเพิ่มความเร็วของโรเตอร์เหนือซิงโครนัส (speed สนามแม่เหล็ก) สลับไปยังโหมดตัวสร้างโดยอัตโนมัติโดยไม่ต้องเปลี่ยน ซึ่งทำให้ง่ายขึ้น แผนภาพการเดินสายไฟเมื่อใช้เบรกไฟฟ้า
นอกจากข้อดีแล้ว มอเตอร์ไฟฟ้าแบบอะซิงโครนัสยังมีข้อเสียหลายประการที่ทำให้ใช้งานกับสต็อกกลิ้งได้ยาก ลักษณะการสตาร์ทของมอเตอร์ด้วย โรเตอร์กรงกระรอกที่ความถี่กระแสคงที่ไม่ได้ให้อัตราเร่งสูงเนื่องจากแรงบิดเริ่มต้นค่อนข้างเล็กและเพิ่มขึ้นเป็นค่าสูงสุดด้วยความเร็วที่เพิ่มขึ้น การควบคุมความเร็วของมอเตอร์ทำได้ยาก ช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์มีขนาดเล็กมาก การเพิ่มช่องว่างจะเพิ่มมวลและเพิ่มขนาดของเครื่องยนต์ การสตาร์ทมอเตอร์ไฟฟ้าด้วยโรเตอร์กรงกระรอกนั้นสัมพันธ์กับการสูญเสียพลังงานจำนวนมากและความร้อนของขดลวด
ความก้าวหน้าของเทคโนโลยีเซมิคอนดักเตอร์กำลังไฟฟ้าและเครื่องมือระบบอัตโนมัติทำให้สามารถสร้างตัวแปลงความถี่คงที่ที่เชื่อถือได้และประหยัดด้วยขนาดและน้ำหนักที่ยอมรับได้สำหรับหัวรถจักรดีเซล นี้เป็นเพราะ การใช้งานจริงในรถจักรดีเซล เกียร์ AC พร้อมมอเตอร์ไฟฟ้ากรงกระรอกแบบอะซิงโครนัส โดยเฉพาะอย่างยิ่งสำหรับหัวรถจักรดีเซลที่มี
ข้าว. 3.23. มอเตอร์ไฟฟ้าแบบอะซิงโครนัสฉุด ED-900 (ส่วนตามยาวและตามขวาง):
1 - เพลา; 2- เครื่องซักผ้า; 3- แบริ่งลูกกลิ้ง; 4 - โล่แบริ่ง; 5- บูช; 6 - แกนโรเตอร์; ขดลวด 7 สเตเตอร์; ฉันเป็นแกนหลักของสเตเตอร์ 9 ตัว (โครงกระดูก); 10 เคสป้องกัน; 1/- ขดลวดโรเตอร์ลัดวงจร 12-- ร่องของแกนโรเตอร์ 13- ร่องของแกนสเตเตอร์; 14 - กระแสน้ำ; 15 ท่อระบายอากาศ; 16- กล่องแคลมป์; 17 - รูระบายอากาศในแกนกลางของโรเตอร์ด้วยเครื่องยนต์ดีเซลที่มีกำลังมากกว่า 2940 กิโลวัตต์ในส่วนเมื่อใช้มอเตอร์ฉุด DC จะต้องทำให้การออกแบบซับซ้อนขึ้นอย่างมาก (ใช้เฟรมสำเร็จรูปหรือเชื่อม, ขดลวดชดเชย ฯลฯ . หรือเพิ่มจำนวนเพลา) โรงงานคาร์คอฟ "Electrotyazhmash" พวกเขา Lenin, โรงงานหัวรถจักรดีเซล Voroshilovgrad ตั้งชื่อตาม V.I. การปฏิวัติเดือนตุลาคมและโรงงานเครื่องกลไฟฟ้าทาลลินน์ Kalinin สร้างรถจักรดีเซลรุ่น TE120 ที่มีกำลัง 2940 กิโลวัตต์พร้อมระบบส่งกำลังไฟฟ้ากระแสสลับซึ่งใช้มอเตอร์ฉุดกรงกระรอกแบบอะซิงโครนัส ED-900 (รูปที่ 3.2.3) พร้อมระบบกันสะเทือนโครงรองรับ (ดูตารางที่ 3.4)
ในเครื่องฉุดลากไฟฟ้ากระแสสลับ วงจรแม่เหล็กที่ทำจากแผ่นเหล็กไฟฟ้าไม่สามารถทำหน้าที่เป็นกรอบของเครื่องพร้อมกันได้ (รูปทรงมีความเสถียรไม่เพียงพอ) ดังนั้นจึงได้รับการแก้ไขในตัวเรือนสเตเตอร์ ความหนาของผนังของตัวเครื่อง (โครงกระดูก) พิจารณาจากสภาวะของความแข็งแรงและการเชื่อมต่อกับส่วนอื่น ๆ ของเครื่อง: เกราะป้องกันแบริ่ง ชิ้นส่วนท่อลม ฯลฯ
ส่วนประกอบหลักของมอเตอร์: สเตเตอร์ โรเตอร์ และส่วนปิดท้ายพร้อมตลับลูกปืน สเตเตอร์ประกอบด้วยตัวเรือน 9, แกน 8, ขดลวด 7 และเครื่องซักผ้าแรงดัน ตัวเครื่องหล่อกลมมีซี่โครงที่ทำให้แข็งในแนวแกนซึ่งสร้างช่องสำหรับทางผ่านของอากาศเย็นสเตเตอร์ เฟรมมีสองช่องสำหรับอากาศเข้าและออก ประตูทางออกติดตั้งปลอกป้องกันที่ป้องกันไม่ให้น้ำเข้าไปในเครื่องยนต์ (เมื่อล้างหัวโบกี้)
แพ็คเกจสเตเตอร์ประกอบขึ้นจากแผ่นเหล็กไฟฟ้าบนปริซึมพิเศษและยึดด้วยเครื่องซักผ้าแรงดัน ขดลวดสเตเตอร์ (ขดลวดสองชั้น) วางอยู่ในร่องของแกนสเตเตอร์และยึดด้วยลิ่มฉนวน ส่วนหน้าของขดลวดสเตเตอร์ได้รับการแก้ไขด้วยวงแหวนรูปกรวย สเตเตอร์ของบาดแผลหันไปตามปริซึมและกดเข้าไปในตัวเรือน ฉนวนจากตัวเรือนขดลวดสเตเตอร์ทำจากฟิล์มโพลีอะมายด์ โรเตอร์ประกอบด้วยเพลา 1, บูช (แกน) 5, แกน 6" และขดลวด 1/
บูชในรูปแบบของท่อถูกกดลงบนเพลาและกดแกนโรเตอร์ที่ประกอบจากแผ่นเหล็กไฟฟ้าลงไป ขดลวดลัดวงจรทำในรูปแบบของ "กรงกระรอก" โดยเติมร่องและปลายแกนด้วยอลูมิเนียมอัลลอยด์ ช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์ I, Г> มม. การออกแบบชุดแบริ่งคล้ายกับชุดแบริ่งของมอเตอร์ฉุด DC
EXCITORS, เครื่องกำเนิดไฟฟ้าเสริม และมอเตอร์ไฟฟ้า
ความก้าวหน้าของเทคโนโลยีเซมิคอนดักเตอร์กำลังไฟฟ้าและเครื่องมือระบบอัตโนมัติทำให้สามารถสร้างตัวแปลงความถี่คงที่ที่เชื่อถือได้และประหยัดด้วยขนาดและน้ำหนักที่ยอมรับได้สำหรับหัวรถจักรดีเซล นี้เป็นเพราะ การใช้งานจริงเกี่ยวกับแรงฉุดลากของเกียร์ AC กับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอก
ลักษณะทางกล มอเตอร์แบบอะซิงโครนัสแข็ง ลักษณะเดียวกันมีกระแสตรงของการกระตุ้นแบบขนาน แต่ความจุเกินของมอเตอร์ฉุดกระแสตรงถูกจำกัดโดยการให้ความร้อนและการสลับ และมอเตอร์แบบอะซิงโครนัสถูกจำกัดด้วยแรงบิดสูงสุดที่พัฒนา ดังนั้นมอเตอร์ฉุดแบบอะซิงโครนัสจึงยอมให้โอเวอร์โหลด โดยจำกัดโดยลักษณะเฉพาะส่วนนั้นที่ทำให้การทำงานมีเสถียรภาพ
ข้อมูลจำเพาะ มอเตอร์ฉุด DAT-510ถูกนำเสนอในตาราง 1.6.
ข้อมูลจำเพาะของมอเตอร์ฉุด DAT-510
มอเตอร์ฉุดแบบอะซิงโครนัส DAT-510ออกแบบมาเพื่อขับเคลื่อนล้อคู่ของสินค้าบรรทุก ผู้โดยสาร และหัวรถจักรดีเซลแบบแยกส่วนด้วย ระบบส่งกำลังไฟฟ้ากระแสสลับ โดยเฉพาะอย่างยิ่งสำหรับการขับขี่หัวรถจักรดีเซล 2TE35A, 2TE25A, TEM10A ตาม GOST 183-74 โหมดการทำงานของมอเตอร์ฉุดคือ S1 (ต่อเนื่อง) อนุญาตให้ใช้โหมด S2 (ระยะสั้น) โดยมีรอบการทำงาน 1 ชั่วโมง
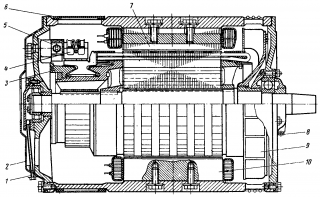
มอเตอร์ฉุดลาก DAT-510 ประกอบด้วยชิ้นส่วนหลักดังต่อไปนี้: สเตเตอร์ โรเตอร์ และชิลด์แบริ่ง (รูปที่ 1.37) รูปร่างของตัวเรือนมอเตอร์ไฟฟ้าเป็นทรงกระบอกโดยมีส่วนปลายทรงกรวยด้านหนึ่งของเพลา ซึ่งทำหน้าที่ให้พอดีกับเฟืองขับของกระปุกเกียร์แบบฉุดลาก
สเตเตอร์ของมอเตอร์มีแกนเบาที่ทำจากแผ่นเหล็กไฟฟ้า เช่นเดียวกับเครื่องลากไฟฟ้ากระแสสลับอื่นๆ ดังนั้นเนื่องจากความเสถียรของรูปร่างไม่เพียงพอ จึงไม่สามารถใช้เป็นโครงเครื่องพร้อมกันได้ เพื่อให้มีเสถียรภาพ แกนกลางได้รับการแก้ไขในแกนหมุน 15 เมตรของตัวเรือนสเตเตอร์ 13 ที่ทำจากเหล็กกล้าคาร์บอน StZkp2 ความหนาของผนังของตัวเรือนนั้นพิจารณาจากสภาวะของความแข็งแรงและการเชื่อมต่อกับส่วนอื่น ๆ ของตัวเครื่อง ตลับลูกปืนกันรุน 9 และ 18
ข้าว. 1.37. ส่วนของมอเตอร์ฉุดแบบอะซิงโครนัส DAT-510
1 - ตลับลูกปืนแกนมอเตอร์ฝา; 2 - เม็ดมีดของตลับลูกปืนแกนมอเตอร์ 3 - ปลอก; 4 - โรเตอร์; 5, 20 - ฝาครอบลูกปืน; 6, 23 - ตราประทับเขาวงกต; 7 - เครื่องซักผ้าแรงขับ; 8, 19 - แบริ่ง; 9 - โล่แบริ่งขนาดใหญ่ 10 - โรเตอร์ที่คดเคี้ยว; 11 - ขดลวดสเตเตอร์; 12, 16 - เครื่องซักผ้าแรงดัน; 13 - ร่างกาย; 14 - แกนสเตเตอร์; 15 - แมนเดรล; 17 - ช่องระบายอากาศ; 18 - โล่แบริ่งขนาดเล็ก 21 - แหวนเขาวงกต; 22 - เพลา; 24 - แขนโรเตอร์
แพ็คเกจสเตเตอร์ประกอบขึ้นจากแผ่นเหล็กไฟฟ้าหนา 0.5 มม. บนปริซึมพิเศษและยึดด้วยเครื่องซักผ้าแรงดัน 12 และ 16 ขดลวดสองชั้นของสเตเตอร์ 11 วางอยู่ในร่องของแกนและยึดด้วยฉนวนเวดจ์ จากนั้นทำการชุบและทำให้แห้ง ส่วนหน้าของขดลวดขดลวดกระดองได้รับการแก้ไขด้วยวงแหวนรูปกรวย สเตเตอร์ที่มีขดลวดวางอยู่ในนั้นหันไปตามปริซึมและกดเข้าไปในตัวเรือน 13
ฉนวนของขดลวดสเตเตอร์จากตัวเรือนทำจากฟิล์มโพลีเอไมด์และเทปแก้วที่เคลือบด้วยวานิชที่เป็นฉนวนไฟฟ้า KO-916K
ขดลวดสเตเตอร์มีสายไฟสามเส้น (รูปที่ 1.38) สำหรับเชื่อมต่อกับ แหล่งภายนอกแหล่งจ่ายไฟที่มีเครื่องหมาย: U - จุดเริ่มต้นของเฟสแรก, V - จุดเริ่มต้นของเฟสที่สอง, W - จุดเริ่มต้นของเฟสที่สาม ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ จำเป็นต้องสลับจุดเริ่มต้นของขดลวดสเตเตอร์สองเฟส
 ข้าว. 1.38. กล่องเชื่อมต่อ DAT-510
ข้าว. 1.38. กล่องเชื่อมต่อ DAT-510
1 - สายเคเบิลเชื่อมต่อภายใน 2, 5 - ปลอกหุ้มฉนวน; 3 - ร่างกาย; 4 - สายไฟ; 6 - สายฟ้า; 7 - สายเสริม
โรเตอร์ของมอเตอร์ตั้งอยู่บนเพลามอเตอร์ซึ่งปลอกแขน 24 ได้รับการแก้ไขในรูปแบบของท่อ (ดูรูปที่ 1.37) แกนโรเตอร์ 14 ประกอบจากแผ่นเหล็กไฟฟ้าหนา 0.5 มม. ถูกกดลงบนท่อ ขดลวดลัดวงจร 10 ทำในรูปแบบของ "กรงกระรอก" โดยเติมร่องและปลายแกนด้วยโลหะผสมอลูมิเนียม ช่องโรเตอร์มีรูปร่างกึ่งวงรีกึ่งปิด
ปลอกโรเตอร์ถูกกดลงบนเพลาโดยมีวงแหวน 6 และ 22 ติดอยู่กับร่องเขาวงกต
เพลาโรเตอร์ทำจากเหล็กแผ่นรีดเกรด ZOHMA พร้อมการอบชุบด้วยความร้อน โรเตอร์มอเตอร์ฉุดมีความสมดุลแบบไดนามิก
เกราะป้องกันแบริ่ง 9 และ 18 มีโครงสร้างแบบเชื่อมพร้อมกับช่องซึ่งปิดด้วยฝาปิด 5 และ 20 และทำหน้าที่ระบายจาระบีที่ใช้แล้ว ZhRO หรือ ZhRO-M
การประกอบโล่แบริ่งพร้อมตัวเรือนสเตเตอร์ 13 ดำเนินการตามหลักการของล็อคลงจอดที่อยู่ตรงกลางเช่น โดยติดตั้งหิ้งที่อยู่ตรงกลางของวงแหวนรอบนอกของ endshield เข้ากับพื้นผิวที่นั่งของตัวเรือนสเตเตอร์ การเชื่อมต่อได้รับการแก้ไขด้วยสลักเกลียว
ในแผงป้องกันแบริ่งที่ด้านข้างตรงข้ามกับไดรฟ์จะมีการติดตั้งเซ็นเซอร์ความเร็วของโรเตอร์ซึ่งโต้ตอบกับขอบฟันของแหวนกันแรงขับ 7 ของตลับลูกปืน 8 ที่ช่องระบายอากาศจากมอเตอร์ฉุด (ช่องระบายอากาศ) 17, มีสถานที่ติดตั้งสำหรับติดตั้งเซ็นเซอร์อุณหภูมิ
มีการติดตั้งตลับลูกปืนลูกกลิ้งแบบ NO-92417 K2M ที่แผงป้องกันด้านข้างของไดรฟ์ และด้านไดรฟ์จะมีการติดตั้งตลับลูกปืนลูกกลิ้งประเภท NO-32332 K2M 7
ตลับลูกปืนแกน 7 พร้อมปลอกทองแดง 2 ใช้สำหรับมอเตอร์ไฟฟ้าที่มีระบบกันสะเทือนตามแนวแกน นอกจากนี้ การออกแบบมอเตอร์ฉุดยังเกี่ยวข้องกับการใช้ตลับลูกปืนกลิ้งตามแนวแกนของมอเตอร์ (รูปที่ 1.39, a) และการระงับโครงรองรับของมอเตอร์ฉุดลาก (รูปที่ 1.39, b)
มอเตอร์ไฟฟ้ามีการระบายอากาศโดยการไหลของอากาศภายนอก ซึ่งจ่ายเข้าไปภายในผ่านหน้าต่างของเคสทรงกลมแบบเชื่อม 13 DAT-510 มีตัวทำให้แข็งในแนวแกนภายในสร้างช่องสำหรับระบายอากาศในส่วนหน้าของสเตเตอร์ที่คดเคี้ยว 77 จาก ด้านการเชื่อมต่อ อากาศไหลผ่านช่องตามแนวแกนของแกนเคลือบของโรเตอร์ 4 ทำให้ส่วนหน้าของสเตเตอร์ที่คดเคี้ยวเย็นลงจากด้านไดรฟ์และเมื่อถูกความร้อนจะถูกโยนออกทางบานประตูหน้าต่างบนช่องระบายอากาศ 17 ของเกราะป้องกันลูกปืน 18 จาก ด้านไดรฟ์
 ข้าว. 1.39. รุ่นของร่างกายของมอเตอร์ฉุด DAT-510
ข้าว. 1.39. รุ่นของร่างกายของมอเตอร์ฉุด DAT-510
เอ - ระบบกันสะเทือนตามแนวแกนพร้อมตลับลูกปืนกลิ้ง 6 - ช่วงล่างรองรับเฟรม
การไหลของอากาศยังทำให้ชุดตลับลูกปืนของโรเตอร์เย็นลงอีกด้วย วัดความดันสถิตย์ของอากาศเย็นที่จุดทดสอบ ค่าความดันต้องเป็นไปตามค่ามาตรฐาน
ตลับลูกปืนแกนมอเตอร์ (ดูรูปที่ 1.37) มีแผ่นปิด 2 อยู่ในฝา 1 ซึ่งเชื่อมต่อกับเฟรมด้วยตัวล็อคพิเศษและยึดด้วยสลักเกลียวเกลียว M36 สี่ตัวที่ทำจากเหล็ก 45 ระดับการหล่อลื่นคงที่ในฝาครอบถูกควบคุม โดยตัวชี้ เพื่อความสะดวกในการขันสกรู สลักเกลียวจะมีน็อตสี่เหลี่ยมติดกับตัวหยุดพิเศษบนเฟรม การคว้านคอสำหรับตลับลูกปืนแกนมอเตอร์จะดำเนินการพร้อมกันกับการคว้านคอสำหรับแผ่นป้องกันตลับลูกปืน ดังนั้นฝาครอบของตลับลูกปืนแกนมอเตอร์จึงไม่ใช่ชิ้นส่วนที่ใช้แทนกันได้ ฝาปิดทำจากเหล็กกล้า 25L1 และมีโครงสร้างที่ซับซ้อนซึ่งใช้สำหรับจัดวางอุปกรณ์หล่อลื่น เพื่อป้องกันตลับลูกปืนในแนวแกนมอเตอร์ไม่ให้เข้าทางฝุ่นและความชื้น แกนระหว่างฝาครอบจะปิดด้วยปลอกหุ้ม แต่ละซับประกอบด้วยสองส่วนซึ่งหนึ่งในนั้นหันหน้าเข้าหาฝามีหน้าต่างสำหรับจ่ายสารหล่อลื่น ในการกำหนดตำแหน่งในทิศทางตามแนวแกน ปลอกหุ้มมีปลอกคอ บุชชิ่งป้องกันกุญแจจากการเลี้ยว ซับในหล่อจากทองเหลือง LKS80-3-3 พื้นผิวด้านในเต็มไปด้วย B16 babbitt หนา 3 มม. และเจาะออกมามากกว่าเส้นผ่านศูนย์กลาง 205 มม. หลังจากคว้านแล้ว แผ่นปิดจะติดตั้งที่คอเพลาของชุดล้อ เพื่อให้สามารถปรับความตึงพอดีของไลเนอร์ในตลับลูกปืนแนวแกนมอเตอร์ระหว่างฝาครอบและตัวเรือน 13 ได้ ติดตั้งตัวเว้นระยะเหล็กหนา 0.35 มม. บนสลักเกลียวของปลอกหุ้ม ซึ่งจะถูกลบออกเมื่อเส้นผ่านศูนย์กลางภายนอกของปลอกหุ้มสึก .
อุปกรณ์ที่ใช้หล่อลื่นตลับลูกปืนแกนมอเตอร์ช่วยรักษาระดับการหล่อลื่นให้คงที่ ฝาครอบมีห้องสื่อสารสองห้องซึ่งเต็มไปด้วยสารหล่อลื่น ซึ่งเส้นด้ายจะแช่อยู่ ห้องที่มีการหล่อลื่นในโหมดปกติไม่มีการสื่อสารกับบรรยากาศ
เรือนเกียร์ได้รับการออกแบบมาเพื่อปกป้องเกียร์จากสภาพแวดล้อมภายนอกและสร้างอ่างน้ำมันสำหรับหล่อลื่นเกียร์ โครงเฟืองสามารถทำจากเหล็กกล้า เชื่อมจากเหล็กแผ่น หรือไฟเบอร์กลาส ที่ทำจากไฟเบอร์กลาสที่ชุบด้วยโพลีเอสเตอร์เรซิน ตัวเคสประกอบด้วยส่วนบนและส่วนล่างซึ่งผ่านการประมวลผลร่วมกันและไม่ต้องถอดประกอบ ปะเก็นถูกติดตั้งตามคอและตามตัวเชื่อมต่อของปลอกหุ้ม ปลอกเหล็กยึดเข้ากับตัวมอเตอร์ไฟฟ้าที่ใช้แรงฉุดลากด้วยสลักเกลียว M30 สามตัวที่ทำจากเหล็ก 45 และปลอกไฟเบอร์กลาส - พร้อมสลักเกลียว M3O สามตัวที่ทำจากเหล็ก 10
ปลอกไฟเบอร์กลาสครึ่งหนึ่งผูกเข้าด้วยกันด้วยสลักเกลียว M12 หกตัวและสลักเกลียว M16 หกตัว ตัวเหล็กมีสลักเกลียว MZO สองตัวที่ปลายและสลักเกลียว M16 สามตัวที่ด้านข้างของคอขนาดใหญ่ ที่ครึ่งบนของปลอกหุ้มมีช่องระบายอากาศซึ่งทำหน้าที่ปรับแรงดันภายในปลอกให้เท่ากันด้วยความดันบรรยากาศ และที่ส่วนล่างจะมีปลั๊กระบาย
หน้า 21 จาก 21
ในการดำเนินงานใน ประเทศต่างๆมีหน่วย EPS มากกว่า 250 ยูนิตพร้อมมอเตอร์ฉุดแบบอะซิงโครนัส มอเตอร์ฉุดลากแบบอะซิงโครนัสใช้กับหัวรถจักรไฟฟ้าฉีดและแยกหัวรถจักร หัวรถจักรดีเซล บนรถไฟฟ้า ทั้งในเขตชานเมืองและรถไฟใต้ดิน
ด้านล่างเราจะพิจารณาพารามิเตอร์ของหัวรถจักรไฟฟ้าซึ่งได้รับการยืนยันจากประสบการณ์แล้ว ซึ่งรวมถึงหัวรถจักรไฟฟ้า E-120 และ E-1200 ซึ่งดำเนินการบนทางรถไฟของรัฐและการขนส่งทางอุตสาหกรรมของเยอรมนีเป็นหลัก ที่น่าสนใจอีกอย่างคือตู้รถไฟไฟฟ้า EA-3000 ที่ดำเนินการในเดนมาร์กและหัวรถจักรไฟฟ้า E-17 ที่ดำเนินการในนอร์เวย์ ประสบการณ์ในการดำเนินงานได้สั่งสมมาอย่างยาวนานสำหรับรถไฟฟ้าใต้ดินในเยอรมนีและฟินแลนด์ ต่อไป เราจะพิจารณาอุปกรณ์ไฟฟ้าของ ERS เป็นหลัก โดยเฉพาะสำหรับไดรฟ์ฉุดลากแบบอะซิงโครนัส
พารามิเตอร์ของตู้รถไฟไฟฟ้าที่มีมอเตอร์ฉุดแบบอะซิงโครนัส พารามิเตอร์หลักของตู้รถไฟไฟฟ้าสรุปไว้ในตาราง 13.4.
คุณสมบัติการออกแบบของตู้รถไฟไฟฟ้าที่พิจารณา:
หัวรถจักรไฟฟ้าทั้งหมดมีระบบขับเคลื่อนเพลาและระบบกันสะเทือนของเฟรม มอเตอร์ฉุด;
เนื่องจากมวลของหัวรถจักรไฟฟ้าต่อเพลาขนาดเล็ก และมวลของอุปกรณ์ไฟฟ้าที่มีนัยสำคัญ ชิ้นส่วนทางกลของหัวรถจักรไฟฟ้าจึงเบามาก
หัวรถจักรไฟฟ้าทั้งหมด (ยกเว้นหัวรถจักรไฟฟ้า E-1200) ให้การกู้คืนพลังงานที่พลังงานโดยประมาณเท่ากับกำลังฉุดของหัวรถจักรไฟฟ้า
หัวรถจักรไฟฟ้าทั้งหมดมีความโดดเด่นด้วยการรบกวนเล็กน้อยในสายการสื่อสารและอุปกรณ์ส่งสัญญาณ
หัวรถจักรไฟฟ้าทั้งหมดมีคุณสมบัติในการยึดเกาะที่ดีและมีอุปกรณ์ที่ค่อนข้างล้ำหน้าในการรักษาค่าสัมประสิทธิ์การใช้คลัตช์ให้อยู่ในระดับสูงในทุกโหมด กล่าวอีกนัยหนึ่ง คุณสมบัติของแอนตี้บ็อกซ์ของมอเตอร์ฉุดแบบอะซิงโครนัสนั้นค่อนข้างจะรับรู้ได้อย่างสมบูรณ์บนตู้ระเนระนาดไฟฟ้าเหล่านี้
ผู้พัฒนาและผู้ผลิตคอนเวอร์เตอร์และระบบควบคุมคือบริษัทแอร์ฟอร์ซ (สวิตเซอร์แลนด์) คุณสมบัติของอุปกรณ์นี้จะกล่าวถึงด้านล่าง
สำหรับตู้รถไฟไฟฟ้าที่ระบุไว้ทั้งหมด ประสบการณ์การใช้งานได้สะสมไว้แล้ว หัวรถจักรไฟฟ้า E1-17 แสดงคุณสมบัติการยึดเกาะที่ดีเมื่อทำงานในสภาพของอาร์กติกบนพื้นที่ภูเขาที่ยากลำบาก อย่างไรก็ตาม ความน่าเชื่อถือของอุปกรณ์ไฟฟ้าในช่วงเริ่มต้นของการทำงานนั้นต่ำกว่าความน่าเชื่อถือของตู้รถไฟไฟฟ้าเชิงพาณิชย์ ความน่าเชื่อถือได้รับการปรับปรุงอย่างต่อเนื่องตลอดหลายปีที่ผ่านมา
ตาราง 13.4
พารามิเตอร์ |
หัวรถจักรไฟฟ้า |
|||
ปีที่ผลิต |
||||
กำลัง, ความเร็วกิโลวัตต์, กม./ชม.: |
||||
ขีดสุด |
||||
แรงฉุดเล็กน้อย kN: |
||||
เมื่อเริ่มต้น |
||||
เล็กน้อย |
||||
ติดต่อแรงดันไฟฟ้าเครือข่าย kV |
||||
ติดต่อความถี่ปัจจุบันของเครือข่าย Hz |
||||
อัตราทดเกียร์ |
||||
จำนวนเพลา |
ตู้รถไฟไฟฟ้า EA-3000 ดำเนินการได้สำเร็จในเดนมาร์ก และการรถไฟของเดนมาร์กตัดสินใจสั่งซื้อตู้รถไฟไฟฟ้าอีกชุดในซีรีส์นี้
หัวรถจักรไฟฟ้า E-120 ได้รับการศึกษาอย่างรอบคอบภายใต้สภาพการทำงาน ซึ่งเกือบจะในทันทีหลังจากการก่อสร้างกลายเป็นว่าเหมาะสมสำหรับการทำงานในสายงานและมีการวิ่งรายเดือน แม้กระทั่งการวิ่งของตู้รถไฟไฟฟ้าแบบอนุกรม ในหัวรถจักรไฟฟ้าเหล่านี้ ในตอนเริ่มต้นของการทำงาน พบส่วนประกอบที่น่าเชื่อถือไม่เพียงพอ อย่างไรก็ตาม ไม่ได้ระบุเฉพาะกับระบบขับเคลื่อนด้วยแรงฉุดไฟฟ้าแบบใหม่ สิ่งเหล่านี้คือหม้อแปลง เครื่องจักรเสริม ฯลฯ อุปกรณ์แปลงสัญญาณแทบไม่ต้องมีการปรับปรุงใดๆ เนื่องจากอุปกรณ์เหล่านี้ได้รับการพัฒนามาอย่างดีในระหว่างการทดสอบม้านั่งของไดรฟ์ไฟฟ้าแบบฉุดลาก
ระดับความน่าเชื่อถือของหัวรถจักรไฟฟ้านั้นเหมือนกับของตู้รถไฟไฟฟ้าแบบอนุกรมที่ดีที่สุด มีแนวโน้มที่จะปรับปรุงความน่าเชื่อถือต่อไป ค่าบำรุงรักษาและซ่อมแซมนั้นต่ำกว่าหัวรถจักรไฟฟ้าที่ผลิตเป็นจำนวนมาก การประหยัดพลังงานเนื่องจากตัวประกอบกำลังสูงและการเบรกแบบสร้างใหม่ได้รับการบันทึกไว้
ข้อดีของหัวรถจักรไฟฟ้า E-120 ในแง่ของการใช้แรงฉุด ตัวประกอบกำลังสูง โดยมีผลรบกวนเล็กน้อยต่อสายสื่อสารและอุปกรณ์ส่งสัญญาณได้รับการยืนยันแล้ว ในแง่ของแรงฉุด หัวรถจักรไฟฟ้า E-120 สี่เพลากลายเป็นว่าเทียบเท่ากับหัวรถจักรไฟฟ้าอนุกรมหกเพลา การทดลองพบว่าควรมีการควบคุมมอเตอร์แบบอะซิงโครนัสแต่ละตัว เพื่อใช้ความเป็นไปได้สูงสุดสำหรับการยึดเกาะของล้อแต่ละล้อ โดยคำนึงถึงการกระจายน้ำหนักบนล้อแบบไดนามิก อย่างไรก็ตาม มันค่อนข้างเป็นไปได้ที่จะจัดหามอเตอร์ฉุดลากแบบอะซิงโครนัสจากยางทั่วไป เช่นเดียวกับที่ทำกับหัวรถจักรไฟฟ้า E-1200
ข้าว. 13.9. เส้นโค้งกระแสและแรงดันของหัวรถจักรไฟฟ้าโดยใช้วงจรเรียงกระแสสี่จตุภาค 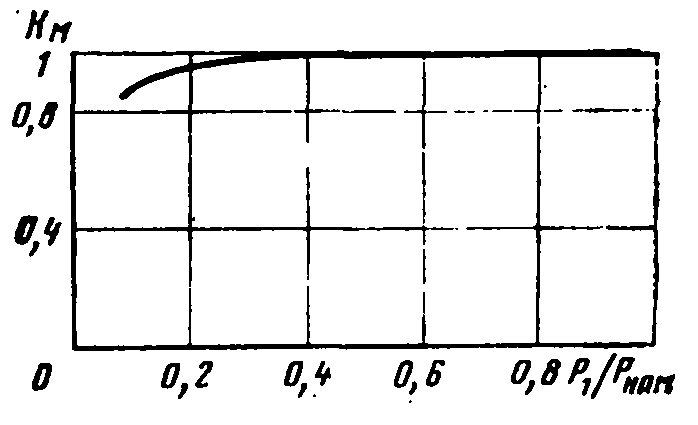
ข้าว. 13.10. การพึ่งพาตัวประกอบกำลังของหัวรถจักรไฟฟ้า H-120 ในการบรรทุก
กระแสไฟฟ้าของรถจักร (รูปที่ 13.9) เกือบจะเป็นไซน์และเกิดขึ้นพร้อมกับเฟสของแรงดันไฟฟ้า U3 การพึ่งพาตัวประกอบกำลังของโหลดแสดงไว้ในรูปที่ 13.10. ในรูป 13.11 เป็นออสซิลโลแกรมของแรงดันและกระแสของเฟสของมอเตอร์ฉุดแบบอะซิงโครนัสโดยปิด PWM ของอินเวอร์เตอร์
ประสบการณ์การใช้งานที่ยาวนานที่สุดได้สะสมไว้ด้วยตู้รถไฟไฟฟ้า E-1200 เหล่านี้เป็นหัวรถจักรไฟฟ้าสี่เพลาสองระบบ (กระแสสลับที่มีความถี่ 50 Hz และ 162/3 Hz) โดยการนัดหมายและการส่งออกที่มีค่าแรงดึงสูง ภายใต้สภาพการทำงานที่ยากลำบากในลุ่มน้ำ Ruhr พวกเขาพบข้อได้เปรียบที่สำคัญเหนือตู้รถไฟไฟฟ้าแบบเรียงกระแสที่มีมอเตอร์กระแสไฟเป็นจังหวะ (EA-1000 หัวรถจักรไฟฟ้า)
ผลลัพธ์หลักของการทำงานของหัวรถจักรไฟฟ้าของทั้งสองประเภทที่กำลังพิจารณาอยู่ในตาราง 13.5. หัวรถจักรทั้งสองดำเนินการภายใต้เงื่อนไขเดียวกัน
จากตาราง. 13.5 ตามนั้น หัวรถจักรไฟฟ้า E-1200 เมื่อเทียบกับหัวรถจักรไฟฟ้า EA-1000 มีความสามารถในการขนส่งที่มากกว่า ค่าใช้จ่ายในการดำเนินงานที่ต่ำกว่า และค่าซ่อม เป็นที่น่าสังเกตว่าหัวรถจักรไฟฟ้าที่มีพื้นฐาน การออกแบบใหม่ไดรฟ์ไฟฟ้า จำนวนความเสียหายลดลงครึ่งหนึ่ง ตัวบ่งชี้ที่สำคัญคือการลดการใช้ทรายลงสามเท่าเมื่อใช้แรงฉุดที่เพิ่มขึ้น
ตู้รถไฟไฟฟ้าจำนวนหนึ่งที่คล้ายกับตู้รถไฟไฟฟ้า E-1200 ดำเนินการสำเร็จในออสเตรีย
การติดตั้งตัวแปลง ในคำสั่งนำร่อง ตัวเลือกหลักทั้งหมดสำหรับคอนเวอร์เตอร์ได้รับการทดสอบ ซึ่งเป็นการรวมกันของอินพุทคอนเวอร์เตอร์ในรูปแบบของวงจรเรียงกระแสแบบควบคุมหรือ สวิตช์ควบคุมแรงดันไฟฟ้ากระแสสลับและกระแสตรงในเครือข่ายหน้าสัมผัสตามลำดับและตัวแปลงความถี่เอาต์พุตในรูปแบบของอินเวอร์เตอร์แรงดันหรือกระแส
ตาราง 13.5
ดัชนี |
หัวรถจักรไฟฟ้า |
|
ปริมาณการจราจร mln. t-km |
||
ต้นทุนการดำเนินงานสัมพัทธ์ |
||
ค่าบำรุงรักษาและซ่อมแซมสัมพัทธ์ |
||
เวลาที่ใช้ในการซ่อมแซมเป็นระยะ (ทุกๆ 3 เดือน) วัน |
||
จำนวนความเสียหายต่อ 1 หัวรถจักรไฟฟ้าต่อเดือน |
||
น้ำหนักเครื่องยนต์ฉุดกำลังเท่ากัน t |
||
สัมประสิทธิ์แรงเสียดทานที่เพิ่มขึ้นสัมพัทธ์ที่ความเร็ว km/h: |
||
ปริมาณการใช้ทราย กก./มล. t-km |
||
วงจรคอนเวอร์เตอร์ (รูปที่ 13.12) ซึ่งพัฒนาโดยกองทัพอากาศ ใช้กับตู้รถไฟไฟฟ้า E-120, EA-3000 และ E1-17 ในตัวแปลงนี้ วงจรเรียงกระแสอินพุตร่วมกับตัวกรอง Lf - Sf จะทำให้แรงดันเอาต์พุตคงที่ กระแสไซน์ที่ใช้จากเครือข่ายเนื่องจากการมอดูเลตความกว้างพัลส์จะถูกแปลงที่เอาต์พุตเป็นกระแสที่มีส่วนประกอบคงที่และส่วนประกอบปัจจุบันมีรูปร่างไซน์สูงถึงสองเท่าของความถี่ ส่วนประกอบสุดท้ายจะไม่ผ่านโดยตัวกรองที่ปรับความถี่เป็นสองเท่าเมื่อเทียบกับความถี่ของแรงดันไฟฟ้า
ตัวแปลง VVS มีลักษณะเฉพาะโดยการเพิ่มจำนวนไทริสเตอร์ทั้งหมดเนื่องจากการมีอยู่ของไทริสเตอร์สวิตชิ่งซึ่งกำลังที่ติดตั้งซึ่งเท่ากับกำลังที่ติดตั้งของไทริสเตอร์หลักเนื่องจากการสลับกระแสหลายครั้งในช่วงระยะเวลาของการเปลี่ยนแปลง ด้วยเหตุนี้ ความสูญเสียในตัวแปลงจึงเพิ่มขึ้นอย่างเห็นได้ชัด ส่วนวงจรเรียงกระแสของตัวแปลงประกอบด้วยไทริสเตอร์ VS1 - VS4 และไดโอด VD1 - VD4 ชุดสวิตช์วงจรเรียงกระแสประกอบด้วยสวิตชิ่งไทริสเตอร์ สวิตชิ่งโช้ก LK และตัวเก็บประจุสวิตชิ่ง Sk
วงจรสวิตชิ่งของอินเวอร์เตอร์ประกอบด้วยสวิตชิ่งคาปาซิเตอร์ Sk และสวิตชิ่งโช้ก Lk
อินเวอร์เตอร์แรงดันไฟฟ้าถูกใช้เป็นอินเวอร์เตอร์ ซึ่งนอกจากการควบคุมความถี่แล้ว ยังสามารถควบคุมแรงดันไฟฟ้าในระหว่างการเร่งความเร็วได้ด้วยการแนะนำ PWM การมอดูเลตความกว้างพัลส์ของแรงดันไฟฟ้านั้นมาจากโหนดสวิตชิ่งสำหรับแต่ละเฟส ตัวอย่างเช่น สำหรับเฟส A ด้วยการใช้ไทริสเตอร์ความเร็วสูง จึงสามารถสลับขั้วแรงดันไฟฟ้าได้หลายครั้งในครึ่งระยะเวลาพร้อมกัน การควบคุมระยะเวลาของชีพจร สิ่งนี้ทำได้โดยสลับกระแสผ่านไทริสเตอร์สวิตชิ่งและการล็อคตามลำดับไทริสเตอร์หลัก
ในลิงค์กลางที่อินพุตของอินเวอร์เตอร์ ตัวกรอง Lφ - Sf รวมอยู่ด้วย ซึ่งออกแบบมาสำหรับความถี่สองเท่าของแหล่งจ่าย แรงดันไฟฟ้ากระแสสลับและตัวเก็บประจุกรอง Cf.
ตัวเหนี่ยวนำ Lc ใช้เพื่อลดแอมพลิจูดของฮาร์โมนิกที่สูงขึ้นของกระแสในระหว่างการเร่งความเร็วของรถไฟ ในตอนท้ายของการเร่งความเร็ว chokes จะลัดวงจรโดยหน้าสัมผัสของคอนแทคเตอร์ K1 - K3
เมื่อออกจาก แรงดันไฟฟ้าการมอดูเลตพัลส์แรงดันหยุดและแรงดันเฟสและรูปคลื่นกระแสกลายเป็นเรื่องปกติสำหรับอินเวอร์เตอร์แรงดันไฟ (ดูรูปที่ 13.11)
AEG บริษัท เยอรมันตะวันตกนำแนวคิดที่แตกต่างออกไปเมื่อสร้างเครื่องแปลงหัวรถจักรไฟฟ้าซึ่งไดอะแกรมแสดงในรูปที่ 13.13, ก. ที่นี่การควบคุมแอมพลิจูดของแรงดันไฟฟ้าในลิงค์วงจรเรียงกระแสและการควบคุมความถี่ในอินเวอร์เตอร์ปัจจุบันนั้นดำเนินการซึ่งไม่ต้องการการสลับไทริสเตอร์ซึ่งทำให้ตัวแปลงง่ายขึ้นอย่างมาก ไทริสเตอร์หลักสามารถทำหน้าที่ได้ช้า ไม่ต้องใช้ตัวเก็บประจุกรอง

ข้าว. 13.11. รูปคลื่นของแรงดันเฟสและกระแสที่ไม่มีการมอดูเลตความกว้างพัลส์ของอินเวอร์เตอร์
ข้าว. 13.12. แผนผังวงจรไฟฟ้าของตัวแปลงหัวรถจักรไฟฟ้า E-120
อย่างไรก็ตาม ความจุของตัวเก็บประจุแบบสวิตชิ่งต้องมีนัยสำคัญ เนื่องจากวงจรสวิตชิ่งรวมถึงการเหนี่ยวนำของขดลวดมอเตอร์ฉุด เมื่อไทริสเตอร์ดีขึ้น อินเวอร์เตอร์ปัจจุบันสูญเสียข้อได้เปรียบเดิมไป 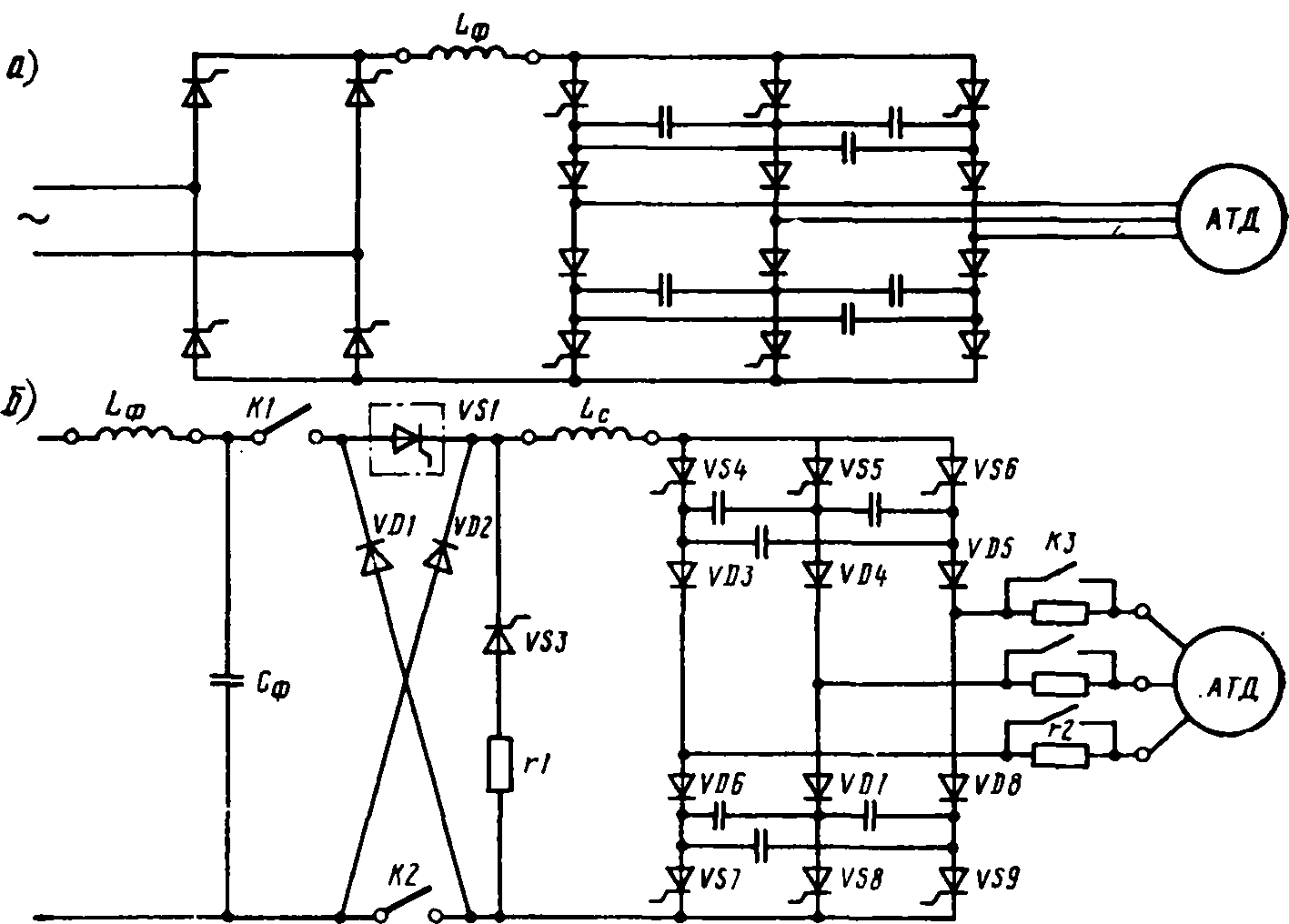
ข้าว. 13.13. วงจรแปลงสำหรับมอเตอร์ลากแบบอะซิงโครนัสที่มีลิงค์ DC (a) และไม่มีลิงค์ DC (b):
K1 - คอนแทคสวิตช์เบรก Cf - ตัวเก็บประจุกรอง; L - เครื่องปฏิกรณ์กรอง; Lc - เครื่องปฏิกรณ์ปรับให้เรียบ; VDI - ไดโอดเบรก; VD2 - ไดโอดย้อนกลับ; VSI - ไทริสเตอร์หลัก p2 - ไทริสเตอร์เบรก; P - ตัวต้านทานเบรก p2 - ตัวต้านทานเบรกในวงจรมอเตอร์
เมื่อ ERS ใช้พลังงานจากเครือข่าย DC ซีเมนส์ (เยอรมนี) ได้พัฒนาตัวแปลงที่แสดงในรูปที่ 13.13 ข. ประกอบด้วยอินเวอร์เตอร์ปัจจุบันและพัลส์เบรกเกอร์อินพุตที่ให้การควบคุมแรงดันไฟตรงที่ราบรื่น ในโหมดแรงขับ หน้าสัมผัส K1 - KZ จะปิดลง เครื่องบดสับไทริสเตอร์ที่มีไทริสเตอร์หลัก VS1 ที่อินพุตซึ่งใช้แรงดันคงที่ที่ระดับคงที่โดยประมาณ แปลงอันหลังเป็นแรงดันคงที่แบบแปรผัน แรงดันไฟฟ้านี้ป้อนผ่านเครื่องปฏิกรณ์ปรับให้เรียบ Lc ของลิงค์ DC ระดับกลางไปยังอินเวอร์เตอร์ (ไทริสเตอร์ 4 - 6 และไดโอด VD3 - VD8) ซึ่งกระแสตรงจะถูกแปลงเป็นสามเฟสในรูปแบบของพัลส์สี่เหลี่ยมที่เลื่อนไป 120 °สำหรับแต่ละเฟส อินเวอร์เตอร์จะควบคุมความถี่ของกระแสไฟขาออก ในช่วงระยะเวลาเริ่มต้น ที่ความถี่ต่ำของแหล่งจ่ายไฟของมอเตอร์ กระแสพัลส์จะถูกมอดูเลต อันเป็นผลมาจากการที่กระแสเฟสสเตเตอร์ได้รูปทรงสี่เหลี่ยมคางหมู
พารามิเตอร์ |
ประเภทของมอเตอร์ฉุดลาก |
|
กำลังไฟฟ้า kWt |
||
โมเมนต์ κΗ μ |
||
ความเร็วในการหมุนสูงสุด, |
||
น้ำหนัก (กิโลกรัม |
||
จำนวนเสา |
||
แรงดันเฟส V |
||
ความถี่ปัจจุบันของสเตเตอร์ Hz |
||
ความถี่ปัจจุบันของโรเตอร์ Hz |
||
อัตราทดเกียร์ |
||
เส้นผ่านศูนย์กลางภายนอก m |
||
ช่องว่างอากาศ mm |
||
ในโหมดเบรกไฟฟ้า สวิตช์เบรก K1 และ K2 จะเปิดขึ้น และเมื่อใช้ไทริสเตอร์ VS3 จะสามารถเชื่อมต่อตัวต้านทานเบรกได้ เมื่อเบรก เครื่องอะซิงโครนัสจะทำงานในโหมดเครื่องกำเนิดไฟฟ้า และอินเวอร์เตอร์ทำหน้าที่เป็นวงจรเรียงกระแสแบบควบคุม สิ่งนี้จะเปลี่ยนขั้ว แรงดันคงที่ Ud แต่ Id ทิศทางปัจจุบันยังคงเหมือนเดิม 
ข้าว. 13.14. แรงฉุดของหัวรถจักรไฟฟ้า E-120
ในการใช้แรงบิดในการเบรกที่ความเร็วใดๆ ของโรเตอร์มอเตอร์ฉุด จำเป็นต้องควบคุมกำลังเบรกโดยการเปลี่ยนแรงดันไฟตรงและกระแสไฟ ฟังก์ชันเหล่านี้ดำเนินการโดยเบรกเกอร์ DC ซึ่งเมื่อหน้าสัมผัสของสวิตช์เบรกเปิดอยู่ ไม่อนุญาตให้มีการไหลของพลังงานจากเครือข่ายหน้าสัมผัสผ่าน ในโหมดนาฬิกา เครื่องบดสับจะทำงานเป็นระยะ ไฟฟ้าลัดวงจรวงจรผ่านไดโอดเบรก VD1 ในเวลาเดียวกัน ในช่วงเวลาของสถานะการนำไฟฟ้าของผู้ขัดขวาง กระแสในเครื่องปฏิกรณ์ Lc ของลิงค์กลางจะเพิ่มขึ้น และในช่วงระยะเวลาของสถานะไม่นำไฟฟ้า กระแสตรงที่ลดลงจะถูกส่งไปยังเครือข่ายการติดต่อ , ปิดผ่านไดโอด VD1 และ VD2 (การเบรกแบบสร้างใหม่) หรือเมื่อไม่มีตัวรับพลังงานที่สร้างใหม่ กระแสจะไหลเข้าสู่ตัวต้านทานการเบรกหลังจากที่ไทริสเตอร์เบรกถูกกระตุ้น (การเบรกแบบรีโอสแตติก) เพื่อรักษาเสถียรภาพของโหมดพักฟื้นเมื่อเบรกด้วย ความเร็วสูงใช้ตัวต้านทาน จำกัด 2 ซึ่งในโหมดการทำงานอื่น ๆ จะถูกแบ่งโดยคอนแทคไฟฟ้าลัดวงจร มีการติดตั้งตัวต้านทานระหว่างอินเวอร์เตอร์และมอเตอร์เพื่อป้องกันไม่ให้อินเวอร์เตอร์สัมผัสกับแรงดันไฟฟ้าเกิน
การออกแบบมอเตอร์ฉุดหัวรถจักรไฟฟ้า E-120 และ E-1200 ได้รับการทดสอบโดยการใช้งานในระยะยาว พารามิเตอร์ของเครื่องเหล่านี้แสดงไว้ในตาราง 13.6.
มอเตอร์ฉุดลากแบบอะซิงโครนัสทั้งหมดที่กองทัพอากาศใช้มีการออกแบบสี่ขั้วซึ่งเกิดจากความจำเป็นในการมอดูเลตพัลส์แรงดันไฟฟ้าในลิงค์อินเวอร์เตอร์เนื่องจากสิ่งนี้จะลดความถี่ในการทำงานให้สูงสุด แรงดันเฟสมอเตอร์และสามารถลดความถี่สัญญาณนาฬิกาของมอดูเลตได้ ซึ่งจะช่วยลดการสูญเสียจากสวิตชิ่ง
มอเตอร์ฉุดลากมีความเร็วในการออกแบบสูง เนื่องจากไม่มีข้อจำกัดเกี่ยวกับการสะสมกระแสไฟและความแข็งแรงของโรเตอร์ ทำให้สามารถลดแรงบิดที่คำนวณได้โดยใช้แรงฉุดลากที่ขอบล้ออย่างมากเนื่องจากอัตราทดเกียร์สูง
ควรสังเกตว่าการใช้แบริ่งยึดมอเตอร์กับสมอเรือที่ล้ำหน้ามากกับมอเตอร์แบบอะซิงโครนัสการฉุดลาก ซึ่งทำให้สามารถรับรู้ความเร็วสูงสุดถึง 3600 รอบต่อนาทีในช่วงเวลาที่สำคัญได้ หนึ่งใน คุณสมบัติการออกแบบคือการใช้เครื่องแยกสารโพลีเมอร์ ขอบคุณ ความถี่สูงมอเตอร์ฉุดหมุนมีมวลค่อนข้างเล็กโดยใช้วิธีการระบายความร้อนด้วยอากาศตามปกติ
ข้าว. 13.14 อธิบายการออกแบบระบบขับเคลื่อนฉุดลาก ก่อนอื่น ให้ความสนใจกับเฟืองก้างปลาซึ่งช่วยให้คุณสามารถส่งกำลังขนาดใหญ่ที่มีความกว้างของเฟืองน้อยที่สุด การถ่ายโอนแรงจากเพลากลวงไปยังล้อจะดำเนินการโดยข้อต่อยางยืดแบบข้อต่อ คล้ายกับระบบส่งกำลังประเภทอัลสตอม
โดยทั่วไปแล้ว มอเตอร์แบบอะซิงโครนัสและเกียร์แบบอะซิงโครนัสการฉุดลากนั้นค่อนข้างสมบูรณ์แบบ ซึ่งแสดงให้เห็นถึงศักยภาพที่ยอดเยี่ยมในการปรับปรุงการออกแบบระบบขับเคลื่อนการลากอย่างน่าเชื่อถือ
ข้อมูลทั่วไป
เครื่องยนต์ฉุด DPM-150 คัน A
การพัฒนาการออกแบบมอเตอร์ลากมีความสัมพันธ์อย่างใกล้ชิดกับการปรับปรุงการออกแบบระบบควบคุม ในอดีต การขนส่งทางไฟฟ้าทุกประเภทถูกสร้างขึ้นด้วยมอเตอร์ลากแบบสะสม ประการแรกเนื่องจากความเรียบง่ายของการถ่ายเทพลังงานและการควบคุมโหมดการทำงาน เครื่องยนต์ดังกล่าวสะดวกต่อการใช้งานในการขนส่ง ลักษณะทางกล. อย่างไรก็ตาม, มอเตอร์สับเปลี่ยนพวกเขายังมีข้อเสียหลายประการที่เกี่ยวข้องกับการมีนักสะสมเป็นหลัก นักสะสมที่มีหน้าสัมผัสเคลื่อนที่ (แปรง) ต้องการการบำรุงรักษาเป็นประจำ เพื่อให้แน่ใจว่าการสลับที่เชื่อถือได้ ลดการเกิดประกายไฟ การออกแบบมอเตอร์ไฟฟ้าจึงซับซ้อน ยิ่งไปกว่านั้น มันจำกัด ความเร็วสูงสุดการหมุนซึ่งนำไปสู่การเพิ่มขนาดของเครื่องยนต์
การพัฒนาเทคโนโลยีเซมิคอนดักเตอร์กำลังความเร็วสูงทำให้ในช่วงทศวรรษ 1960 - 80 ได้ละทิ้งระบบควบคุมรีโอสแตทสำหรับมอเตอร์ลากแบบสะสมเป็นครั้งแรก แทนที่ด้วยแรงกระตุ้นที่น่าเชื่อถือและประหยัดกว่า จากนั้นจึงดำเนินการผลิตรถยนต์ด้วย ไดรฟ์ฉุดแบบอะซิงโครนัส บนรถไฟใต้ดินในประเทศ รถยนต์ประเภทแรกที่ผลิตจำนวนมากที่มีการควบคุมแรงกระตุ้นคือประเภท 81-718/719 ในปี 2534 และรถยนต์ประเภทแรกที่ผลิตในปริมาณมากที่มีมอเตอร์แบบอะซิงโครนัสคือ Yauza 81-70.1/721.1 ในปี 2541
ข้อเสียหลัก มอเตอร์เหนี่ยวนำคือความซับซ้อนของการควบคุมและความซับซ้อนของการเบรกด้วยไฟฟ้าเมื่อใช้มอเตอร์ที่มีโรเตอร์แบบกรงกระรอก ดังนั้นการออกแบบของไดรฟ์ฉุดกำลังได้รับการพัฒนาโดยใช้มอเตอร์ซิงโครนัสที่มีโรเตอร์บน แม่เหล็กถาวร, เปลี่ยนมอเตอร์ฝืน
มอเตอร์ฉุดสะสม

เครื่องยนต์ฉุด DPT-114 (คล้ายกับ DK-117)
ในรัสเซียมีมอเตอร์ดึง DC แบบรวมชุดเดียวซึ่งรวมถึงมอเตอร์รถไฟฟ้าใต้ดินด้วย ทั้งหมดมีหลักการจัดวางร่วมกัน รวมถึงส่วนประกอบและชิ้นส่วนที่เป็นหนึ่งเดียว ในการผลิตมอเตอร์ลากแบบรวมศูนย์ คุณสามารถใช้อุปกรณ์เครื่องจักรประเภทเดียวกันซึ่งจะช่วยลดต้นทุนได้ มอเตอร์ไฟฟ้ากระแสตรงใช้กันอย่างแพร่หลายในรถยนต์ใต้ดิน เครื่องยนต์ดังกล่าวมีลักษณะการยึดเกาะที่ดี ค่อนข้างง่ายในการออกแบบและเชื่อถือได้ในการใช้งาน จากการออกแบบ มอเตอร์ฉุดลากของสต็อกกลิ้งไฟฟ้าแตกต่างกันอย่างมากจากมอเตอร์กระแสตรงแบบอยู่กับที่ ซึ่งอธิบายได้จากลักษณะเฉพาะของตำแหน่งและสภาพการทำงาน ขนาดของมอเตอร์ฉุดลากที่แขวนอยู่ใต้ตัวรถถูกจำกัดด้วยขนาดช่วงล่าง เส้นผ่านศูนย์กลางของมันถูกกำหนดโดยเส้นผ่านศูนย์กลางของล้อเนื่องจากต้องรักษาระยะห่างจากจุดต่ำสุดของเครื่องยนต์จนถึงระดับของหัวราง ความยาวของมอเตอร์ฉุดถูกจำกัดด้วยขนาดโดยรวมของโบกี้ มีการติดตั้งมอเตอร์ฉุดลากสี่ตัวบนเกวียน: หนึ่งตัวสำหรับคู่ล้อแต่ละคู่ การนับของพวกเขาไปตามแกน นับจากห้องควบคุม มอเตอร์ลากจูงทำงานภายใต้สภาวะที่ยากลำบาก เนื่องจากได้รับสิ่งสกปรกจากรางรถไฟ ฝุ่นจากผ้าเบรก ฝนและหิมะบนส่วนที่เปิดของราง ดังนั้นทุกส่วนในร่างกายจึงต้องได้รับการปกป้อง เพื่อการระบายความร้อนที่ดีขึ้นระหว่างการทำงานของมอเตอร์ฉุด มีการติดตั้งพัดลมบนเพลากระดอง ดูดอากาศจากด้านข้างของตัวสะสม และขับผ่านมอเตอร์ ในหนังสือเดินทางของเครื่องเขียน เครื่องจักรไฟฟ้ามักจะระบุกำลังไฟต่อเนื่องที่กำหนดนั่นคือกำลังที่เครื่องต้องให้อย่างไม่มีกำหนดเป็นเวลานานและอุณหภูมิของส่วนประกอบและชิ้นส่วนไม่ควรเกินค่าที่อนุญาตโดยมาตรฐานสำหรับวัสดุฉนวน โหมดการทำงานของมอเตอร์ฉุดลากเปลี่ยนไปอย่างมากขึ้นอยู่กับโปรไฟล์ของรางและน้ำหนักของรถไฟ สิ่งนี้ไม่อนุญาตให้เราระบุลักษณะการทำงานของมอเตอร์ฉุดตามค่าเท่านั้น จัดอันดับอำนาจโหมดยาว ดังนั้นคุณลักษณะของมอเตอร์ฉุดจึงมีให้สำหรับโหมดรายชั่วโมงและโหมดสูงสุด
มอเตอร์ฉุดแบบอะซิงโครนัส

มอเตอร์แบบอะซิงโครนัสฉุด DATE-170
มอเตอร์ฉุดลาก DATE-170 รวมอยู่ในชุดขับเคลื่อนฉุดลาก KATP-1 ที่ติดตั้งในรถยนต์หมายเลข 81-70.1/721.1 และ 81-740/741 พารามิเตอร์หลักของพวกเขา:
- กำลังไฟพิกัด - 170 kW
- แรงดันไฟฟ้าขั้นต่ำ - 530 V
- จัดอันดับความถี่ปัจจุบันของสเตเตอร์ - 43 Hz
- ความเร็วสูงสุด - 1290 rpm
- ความเร็วสูงสุด - 3600 รอบต่อนาที
- น้ำหนัก - 805 กก.
นอกจากนี้ เกวียนที่ผลิตในประเทศพร้อมระบบขับเคลื่อนแบบอะซิงโครนัสที่ผลิตโดย Skoda นั้นกำลังดำเนินการอยู่ที่สถานีรถไฟใต้ดินของคาซาน เคียฟ และปราก
การออกแบบเครื่องยนต์ฉุดลาก
อุปกรณ์ DC ฉุดมอเตอร์
DC traction motor ทั้งหมดของรถ Subway มีการออกแบบที่เหมือนกัน มอเตอร์ประกอบด้วยโครง, เสาหลักสี่เสาและเสาเพิ่มเติมสี่เสา, กระดอง, โล่แบริ่ง, อุปกรณ์แปรง, พัดลม
โครงเครื่องยนต์
มันทำจากเหล็กแม่เหล็กไฟฟ้ามีรูปทรงกระบอกและทำหน้าที่เป็นวงจรแม่เหล็ก ตะขอเกี่ยวสามตัวและซี่โครงนิรภัยสองซี่สำหรับยึดเข้ากับคานขวางของโครงโบกี้อย่างแน่นหนา โครงมีรูสำหรับยึดเสาหลักและเสาเพิ่มเติม ช่องระบายอากาศ และช่องเก็บของ สายไฟหกเส้นออกมาจากโครงเครื่องยนต์ ส่วนท้ายของเฟรมปิดด้วยแผ่นป้องกันลูกปืน โครงกระดูกมีป้ายบอกผู้ผลิต หมายเลขซีเรียล น้ำหนัก กระแสไฟฟ้า ความเร็ว กำลังไฟ และแรงดันไฟฟ้า
เสาหลัก
เครื่องยนต์ฉุด DK-117 ในส่วน
ออกแบบมาเพื่อสร้างฟลักซ์แม่เหล็กหลัก เสาหลักประกอบด้วยแกนและขดลวด ขดลวดของเสาหลักทั้งหมดเชื่อมต่อกันเป็นอนุกรมและสร้างขดลวดกระตุ้น แกนกลางทำจากแผ่นเหล็กไฟฟ้าหนา 1.5 มม. ช่วยลดกระแสน้ำวน ก่อนการประกอบ แผ่นจะถูกทาสีทับด้วยวานิชที่เป็นฉนวน บีบอัดด้วยการกดและยึดด้วยหมุดย้ำ ส่วนของแกนกลางที่หันไปทางกระดองนั้นกว้างขึ้นและเรียกว่าชิ้นขั้ว ส่วนนี้ทำหน้าที่รองรับขดลวดและกระจายฟลักซ์แม่เหล็กในช่องว่างอากาศได้ดีขึ้น ในมอเตอร์ฉุดลาก DK-108A ที่ติดตั้งในรถยนต์ E (เทียบกับ DK-104 ในรถยนต์ D) ช่องว่างระหว่างสมอและเสาหลักจะเพิ่มขึ้น ซึ่งทำให้สามารถเพิ่มความเร็วในการวิ่งได้ โหมด 26% และในทางกลับกัน ประสิทธิภาพการเบรกด้วยไฟฟ้าลดลง (การกระตุ้นมอเตอร์ช้าในโหมดเครื่องกำเนิดไฟฟ้าเนื่องจากฟลักซ์แม่เหล็กไม่เพียงพอ) เพื่อเพิ่มประสิทธิภาพของการเบรกด้วยไฟฟ้าในขดลวดของเสาหลัก นอกเหนือจากขดลวดหลักสองเส้นที่สร้างฟลักซ์แม่เหล็กหลักในโหมดการลากและการเบรก ยังมีอคติที่สามซึ่งสร้างฟลักซ์แม่เหล็กเพิ่มเติมเมื่อเครื่องยนต์ ทำงานในโหมดตัวสร้างเท่านั้น ขดลวดอคติเชื่อมต่อขนานกับขดลวดหลักทั้งสองและขับเคลื่อนโดยวงจรไฟฟ้าแรงสูงผ่าน เบรกเกอร์, ฟิวส์และคอนแทคเตอร์ ฉนวนของขดลวดของเสาหลักคือออร์กาโนซิลิกอน เสาหลักติดกับแกนกลางด้วยสลักเกลียวสองตัวซึ่งถูกขันให้เป็นแท่งสี่เหลี่ยมที่อยู่ในตัวแกน
เสาเพิ่มเติม
ได้รับการออกแบบมาเพื่อสร้างฟลักซ์แม่เหล็กเพิ่มเติม ซึ่งปรับปรุงการสวิตชิ่งและลดปฏิกิริยาของกระดองในพื้นที่ระหว่างเสาหลัก มีขนาดเล็กกว่าเสาหลักและตั้งอยู่ระหว่างเสา เสาเพิ่มเติมประกอบด้วยแกนและขดลวด แกนกลางถูกสร้างเป็นเสาหิน เนื่องจากกระแสน้ำวนที่ส่วนปลายไม่เกิดขึ้นเนื่องจากการเหนี่ยวนำขนาดเล็กภายใต้ขั้วเพิ่มเติม แกนกลางติดกับเฟรมด้วยสลักเกลียวสองตัว มีการติดตั้งตัวเว้นวรรคทองเหลืองไดอะแมกเนติกระหว่างแกนและแกนเพื่อลดการรั่วไหลของฟลักซ์แม่เหล็ก ขดลวดของเสาเพิ่มเติมเชื่อมต่อกันแบบอนุกรมและด้วยขดลวดกระดอง
สมอ

เครื่องยนต์ฉุด DK-108 ในส่วน
เครื่อง DC มีอาร์เมเจอร์ซึ่งประกอบด้วยแกนกลาง ขดลวด ตัวสะสม และเพลา แกนกระดองเป็นทรงกระบอกที่ทำจากแผ่นเหล็กไฟฟ้าหนา 0.5 มม. ประทับตรา เพื่อลดการสูญเสียจากกระแสน้ำวนที่เกิดขึ้นเมื่อกระดองข้ามสนามแม่เหล็ก แผ่นจะถูกหุ้มฉนวนจากกันด้วยสารเคลือบเงา แต่ละแผ่นมีรูพร้อมรูสำหรับติดตั้งบนเพลา รูระบายอากาศ และร่องสำหรับวางขดลวดกระดอง ในส่วนบน ร่องจะมีลักษณะประกบกัน แผ่นถูกวางบนเพลาและยึดด้วยกุญแจ แผ่นประกอบถูกกดระหว่างเครื่องฉีดน้ำแรงดันสองตัว ขดลวดกระดองประกอบด้วยส่วนที่วางอยู่ในร่องของแกนกลางและเคลือบด้วยแอสฟัลต์และเบคาไลต์วานิช เพื่อป้องกันไม่ให้ขดลวดหลุดออกจากร่อง ลิ่ม textolite จะถูกตอกเข้าไปในส่วนร่องและส่วนด้านหน้าและด้านหลังของขดลวดนั้นเสริมด้วยผ้าพันแผลลวดซึ่งหลังจากการม้วนแล้วจะบัดกรีด้วยดีบุก จุดประสงค์ของตัวรวบรวมเครื่อง DC ในโหมดการทำงานที่แตกต่างกันนั้นไม่เหมือนกัน ดังนั้นในโหมดเครื่องกำเนิดไฟฟ้า ตัวสะสมจะทำหน้าที่แปลงแรงเคลื่อนไฟฟ้าแบบแปรผัน (emf) ที่เหนี่ยวนำในขดลวดกระดองให้เป็นแรงเคลื่อนไฟฟ้าคงที่ บนแปรงของเครื่องกำเนิดไฟฟ้าในมอเตอร์ - เพื่อเปลี่ยนทิศทางของกระแสในตัวนำของขดลวดกระดองเพื่อให้กระดองมอเตอร์หมุนไปในทิศทางใดทิศทางหนึ่ง ตัวสะสมประกอบด้วยปลอกหุ้ม, แผ่นทองแดงตัวสะสม, กรวยแรงดัน แผ่นสะสมถูกแยกออกจากกันโดยแผ่นไมคาไนต์ จากบูชชิ่งและกรวยแรงดัน โดยหุ้มฉนวนที่ปลอกแขน ส่วนการทำงานของตัวสะสมซึ่งสัมผัสกับแปรงนั้นถูกกลึงและขัดเงา เพื่อที่ว่าในระหว่างการใช้งานแปรงจะไม่สัมผัสกับเพลต micanite ตัวสะสมจะต้องอยู่ภายใต้ "ราง" ในเวลาเดียวกัน แผ่นไมคาไนต์จะต่ำกว่าแผ่นสะสมประมาณ 1 มม. จากด้านข้างของแกนกลางในเพลตตัวรวบรวมจะมีส่วนที่ยื่นออกมาพร้อมช่องสำหรับการบัดกรีตัวนำของขดลวดกระดอง แผ่นสะสมมีส่วนรูปลิ่มและเพื่อความสะดวกในการยึด - รูปทรงประกบ ตัวสะสมถูกติดตั้งบนเพลากระดองด้วยการกดพอดีและยึดด้วยกุญแจ เพลากระดองมีเส้นผ่านศูนย์กลางการลงจอดต่างกัน นอกจากกระดองและตัวสะสมแล้ว ปลอกพัดลมเหล็กยังถูกกดลงบนเพลา วงแหวนด้านในของตลับลูกปืนและบูชแบริ่งติดตั้งบนเพลาแบบร้อน
โล่แบริ่ง
โล่ติดตั้งด้วยลูกปืนหรือลูกกลิ้ง - เชื่อถือได้และบำรุงรักษาต่ำ ด้านตัวสะสมมีตลับลูกปืนกันรุน วงแหวนรอบนอกของมันติดกับกระแสน้ำของโล่ลูกปืน ที่ด้านข้างของระบบส่งกำลังการฉุดลากมีการติดตั้งตลับลูกปืนอิสระซึ่งช่วยให้เพลากระดองยืดขึ้นเมื่อถูกความร้อน แบริ่งหล่อลื่นด้วยจาระบี เพื่อป้องกันไม่ให้น้ำมันหล่อลื่นถูกโยนออกจากห้องหล่อลื่นระหว่างการทำงานของเครื่องยนต์ จึงมีซีลไฮดรอลิก (เขาวงกต) สารหล่อลื่นที่มีความหนืดซึ่งเข้าไปในช่องว่างเล็ก ๆ ระหว่างวงแหวนร่อง - labich ที่กลึงในเกราะและแขนเสื้อที่ติดตั้งบนเพลาถูกโยนไปที่ผนังของเขาวงกตภายใต้การกระทำของแรงเหวี่ยงซึ่งพาร์ติชั่นไฮดรอลิกถูกสร้างขึ้นโดย น้ำมันหล่อลื่นนั้นเอง โล่แบริ่งติดอยู่ที่ทั้งสองด้านของเฟรม
อุปกรณ์แปรง
ในการเชื่อมต่อตัวสะสมเครื่องยนต์กับวงจรไฟฟ้าของรถยนต์นั้นใช้แปรงอิเล็กโตรกราไฟต์ของแบรนด์ EG-2A ซึ่งมีคุณสมบัติการสลับที่ดีมีความแข็งแรงเชิงกลสูงและสามารถทนต่อการโอเวอร์โหลดหนักได้ แปรงเป็นปริซึมสี่เหลี่ยม ขนาด 16 x 32 x 40 มม. พื้นผิวการทำงานของแปรงถูกกราวด์กับตัวสะสมเพื่อให้แน่ใจว่ามีการสัมผัสที่เชื่อถือได้ แปรงถูกติดตั้งในที่ยึดที่เรียกว่าที่ยึดแปรง และเชื่อมต่อกับพวกมันด้วยตัวแบ่งทองแดงที่ยืดหยุ่นได้: ที่ยึดแปรงแต่ละอันมีแปรงสองอัน จำนวนที่ยึดแปรงคือสี่อัน แรงกดบนแปรงถูกกระทำโดยสปริง โดยวางปลายด้านหนึ่งผ่านนิ้วเข้าไปในแปรง อีกด้านหนึ่ง - เข้าไปในที่ยึดแปรง ต้องปรับแรงกดบนแปรงภายในขอบเขตที่กำหนดไว้อย่างเคร่งครัด เนื่องจากแรงกดที่มากเกินไปจะทำให้แปรงสึกเร็วและให้ความร้อนแก่ตัวสะสม และแรงกดที่ไม่เพียงพอไม่ได้ให้การสัมผัสที่เชื่อถือได้ระหว่างแปรงกับตัวสะสม ส่งผลให้เกิดประกายไฟภายใต้แปรง การกดไม่ควรเกิน 25N (2.5 กก.) และน้อยกว่า 15N (1.5 กก.) ที่ยึดแปรงติดตั้งอยู่บนโครงยึด และด้วยความช่วยเหลือของหมุดสองอันที่กดเข้าไปในโครงยึด จะถูกยึดเข้ากับส่วนป้องกันปลายโดยตรง โครงยึดจากที่ยึดแปรงและแผงแบริ่งหุ้มฉนวนด้วยฉนวนพอร์ซเลน ในการตรวจสอบสับเปลี่ยนและตัวยึดแปรงในโครงเครื่องยนต์ มีช่องพร้อมฝาปิดที่ป้องกันน้ำและสิ่งสกปรกได้อย่างเพียงพอ
พัดลม
ในระหว่างการใช้งานจำเป็นต้องทำให้เครื่องยนต์เย็นลงเนื่องจากอุณหภูมิของขดลวดที่เพิ่มขึ้นกำลังเครื่องยนต์จะลดลง พัดลมประกอบด้วยปลอกเหล็กและใบพัดซิลูมินที่ยึดด้วยหมุดย้ำแปดตัว ใบพัดถูกจัดเรียงในแนวรัศมีเพื่อปล่อยอากาศในทิศทางเดียว พัดลมหมุนไปพร้อมกับเกราะของเครื่องยนต์ทำให้เกิดสุญญากาศในนั้น การไหลของอากาศจะถูกดูดเข้าไปในเครื่องยนต์ผ่านรูที่ด้านข้างของท่อร่วมไอดี ส่วนหนึ่งของการไหลของอากาศล้างสมอ เสาหลักและเสาเพิ่มเติม อีกส่วนไหลผ่านภายในตัวสะสมและยึดผ่านท่อระบายอากาศ อากาศถูกผลักออกจากด้านข้างของพัดลมผ่านช่องของโครงกระดูก
อุปกรณ์ของมอเตอร์แบบอะซิงโครนัสที่มีโรเตอร์กรงกระรอก
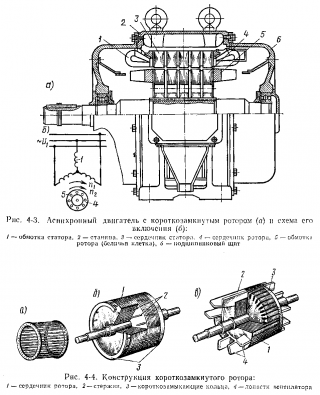
คัทอะเวย์มอเตอร์เหนี่ยวนำอุตสาหกรรม
มอเตอร์แบบอะซิงโครนัสประกอบด้วยสององค์ประกอบหลัก: สเตเตอร์และโรเตอร์ วางบนสเตเตอร์ ขดลวดสามเฟสที่สร้างสนามแม่เหล็กหมุน ความเร็วของการหมุนของสนามแม่เหล็กถูกกำหนดโดยความถี่ของกระแสที่จ่ายให้กับมอเตอร์และจำนวนคู่ของขั้ว
การหมุนของโรเตอร์จะดำเนินการในรูปแบบของ "กรงกระรอก" เป็นการลัดวงจรและไม่มีลีด กรงกระรอกประกอบด้วยแท่งทองแดงหรืออลูมิเนียมลัดวงจรที่ปลายด้วยวงแหวนสองอัน แท่งของขดลวดนี้ถูกสอดเข้าไปในร่องของแกนโรเตอร์ ประกอบจากแผ่นเหล็กไฟฟ้าโดยไม่มีฉนวน ใบมีดถูกติดตั้งที่ปลายโรเตอร์เพื่อสร้างพัดลมแบบแรงเหวี่ยง กระแสในโรเตอร์ถูกเหนี่ยวนำโดยสนามสเตเตอร์ที่เคลื่อนที่สัมพันธ์กับมัน ดังนั้นสำหรับการทำงานของเครื่องยนต์จึงจำเป็นต้องมีความแตกต่างระหว่างความเร็วของการหมุนของโรเตอร์และสนามสเตเตอร์ซึ่งสะท้อนให้เห็นในชื่อของมัน
ลักษณะของมอเตอร์ฉุดลาก
ตารางแสดง ข้อมูลจำเพาะมอเตอร์ฉุดสับเปลี่ยนของรถยนต์รถไฟใต้ดิน:
| ประเภทของเครื่องยนต์ | DPM-151 | DK-102A…เคะ | SL-104n | USL-421 | DK-104A | DK-104G, ดิว | DK-108A | DK-108A1 | DK-108G | DK-108D | DK-112A | DK-115G | DK-116A | DK-117A | DK-117DM | DK-120AM |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| แบบเกวียน | ใน2 | AT3 | ใน 1 |
คู่มือนี้มีข้อมูลทั่วไปเกี่ยวกับการออกแบบเครื่องจักรไฟฟ้าแบบอะซิงโครนัสวัตถุประสงค์ของส่วนประกอบอุปกรณ์ของมอเตอร์ฉุดรุ่นเฉพาะ พิจารณาองค์ประกอบของชุดอุปกรณ์ไฟฟ้ากำลังวัตถุประสงค์ของส่วนประกอบงานและปฏิสัมพันธ์
เพื่อการรับรู้ที่ถูกต้องของวัสดุที่นำเสนอ จำเป็นต้องมีแนวคิดเกี่ยวกับหลักการทั่วไปของการควบคุมอุปกรณ์ไฟฟ้าและการควบคุมรถไฟโดยใช้ Vityaz ACS และผ่านช่องทางควบคุมสำรอง (ไม่ได้พิจารณาในบทช่วยสอนนี้) การศึกษาวัสดุจะได้รับการอำนวยความสะดวกโดยความรู้พื้นฐานทางวิศวกรรมไฟฟ้ารวมถึง และกระแสสลับตลอดจนหลักการก่อสร้าง วงจรไฟฟ้าในระบบกระแสสลับสามเฟส ในการทำเช่นนี้ ผู้เขียนแนะนำให้ศึกษาส่วนที่เกี่ยวข้องของวิศวกรรมไฟฟ้าโดยใช้วรรณกรรมเพื่อการศึกษาหรือเนื้อหาที่นำเสนอในภาคผนวก
ในการเตรียมการ มีการใช้วรรณกรรมและเอกสารทางเทคนิค ซึ่งมีรายชื่ออยู่ท้ายคู่มือ
ผู้เขียนแสดงความขอบคุณต่อผู้เชี่ยวชาญทุกคนที่มีส่วนร่วมในการเตรียมเนื้อหาไม่ทางใดก็ทางหนึ่ง ฉันขอแสดงความขอบคุณเป็นพิเศษต่อ N.N. Danilov รองหัวหน้าแผนกเทคนิคของ CJSC ZREPS ที่ให้ความช่วยเหลืออันล้ำค่าในการเตรียมบทที่สาม
คู่มือนี้จัดทำขึ้นสำหรับพนักงานที่ศึกษาอาชีพคนขับที่ศูนย์ฝึกอบรมและการผลิตของเมโทรเป็นหลัก แต่อาจเป็นประโยชน์สำหรับพนักงานในคลังไฟฟ้าที่ต้องการพัฒนาความรู้ในด้านระบบขับเคลื่อนด้วยไฟฟ้าแบบลากจูง
ครูยูโอซี
มอสโกเมโทร
ดานิลอฟ อี.บี.
ไดรฟ์ไฟฟ้าฉุดแบบอะซิงโครนัสบนรถยนต์รถไฟใต้ดิน กวดวิชา.
|
บทนำ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
ข้อมูลทั่วไปเกี่ยวกับการทำงานของสามเฟสแบบอะซิงโครนัส เครื่องไฟฟ้าและการออกแบบ . . . . . . . . . . . . | |||
|
การออกแบบและหลักการทำงานของอะซิงโครนัส เครื่องจักรไฟฟ้า . . . . . . . . . . . . . . …. . . . . . . . . . . . | |||
|
การก่อตัวของแม่เหล็กไฟฟ้าหมุน แรงบิดในเครื่องไฟฟ้าแบบอะซิงโครนัส . . . . . . | |||
|
อุปกรณ์ลากจูงแบบอะซิงโครนัส รายละเอียดทางเทคนิค. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
พารามิเตอร์หลักของเครื่องยนต์ . . . . . . . . . . . . . . . . . . | |||
|
สเตเตอร์. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
โรเตอร์ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
โล่แบริ่ง . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
การระบายอากาศ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
เซ็นเซอร์ความเร็วโรเตอร์ . . . . . . . . . . . . . . . . . . . | |||
|
ฉุดลาก. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
ตู้คอนเทนเนอร์ Traction Inverter KTI. . . . . . . . . . . . . . . . . | |||
|
การทำงานของไดรฟ์ฉุด . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
แอปพลิเคชั่น | |||
|
กระแสสลับคืออะไรและแตกต่างจากกระแสตรงอย่างไร . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . | |||
|
กระแสสลับสามเฟส . . . . . . . . . . | |||
|
สนามแม่เหล็กหมุน... . . . . . . . . . . . . . . . . . . . . | |||
|
ข้อมูลอ้างอิง . . . . . . . . . . . . . . . . . . . . . . . . . | |||
1. บทนำ
การใช้เครื่องจักรไฟฟ้ากระแสสลับเป็นมอเตอร์ฉุดบน การขนส่งทางรถไฟเกิดความล่าช้าเป็นเวลานานเนื่องจากปัญหาในการจัดหาเครื่องรีดไฟฟ้าแบบสามเฟส กระแสสลับ. อย่างไรก็ตาม การพัฒนาอุตสาหกรรมไฟฟ้า โดยเฉพาะอย่างยิ่งการปรับปรุงอุปกรณ์อิเล็กทรอนิกส์กึ่งตัวนำกำลังและวงจรไมโครโปรเซสเซอร์ ได้นำไปสู่การสร้างเครื่องแปลงกระแสไฟฟ้าและแรงดันไฟฟ้าที่มีกำลังเพียงพอในการจ่ายพลังงานให้กับมอเตอร์แบบฉุดลาก การพัฒนาทรานซิสเตอร์กำลังสูงมีบทบาทพิเศษในเรื่องนี้
เมื่อเปรียบเทียบกับมอเตอร์แบบสับเปลี่ยนกระแสตรง มอเตอร์แบบอะซิงโครนัสมีข้อดีหลายประการ
เป็นครั้งแรกในการผลิตจำนวนมากในประเทศ การใช้มอเตอร์แบบอะซิงโครนัสเป็นมอเตอร์ฉุดถูกใช้ในรถยนต์รถไฟใต้ดินรุ่น 81-740/741 และในส่วนของรถยนต์รุ่น 81-720/721 และต่อมาในรถยนต์รุ่น 81- 760/761. อุตสาหกรรมในประเทศได้เปิดตัวการผลิตมอเตอร์ไฟฟ้าแบบอะซิงโครนัสสำหรับรถยนต์รถไฟใต้ดิน ปัจจุบันรถยนต์สามารถติดตั้งเครื่องยนต์ได้:
TAD 280M 4U2 ผลิตโดย AEK Dynamo;
DATE-170 4U2 การผลิต « Electrotyazhmash-Privod LLCเมืองลิซวา;
TADVM-280 4U2 ผลิตโดย OAO NIPTIEM, Vladimir;
DATM-2U2 ผลิตโดย OAO Pskov Electric Machine Building
telny พืช ";
DTA 170 U2 JSC "โรงงานสร้างเครื่องจักรไฟฟ้าริกา";
TA 280 4MU2 ผลิตโดย OAO ELDIN (Yaroslavl Electric
โรงงานวิศวกรรม)
มอเตอร์ไฟฟ้าขับเคลื่อนโดยตัวแปลงซึ่งเป็นส่วนหนึ่งของ KATP-1 หรือ KATP-2 ที่ผลิตโดย OAO Metrovagonmash
ไดรฟ์แบบอะซิงโครนัสชุดแรกบนรถไฟใต้ดินคือ HITACHI และ ALSTOM ที่ผลิตในต่างประเทศ