มอเตอร์ไฟฟ้าคือมอเตอร์ที่แปลง พลังงานไฟฟ้าเป็นเครื่องกล
ส่วนหลักของมอเตอร์ไฟฟ้าคือวงจร (เฟรม, ขดลวด) ที่มีกระแสอยู่ในสนามแม่เหล็กแรงสูง (รูปที่ 1) แรงบิดกระทำต่อวงจรในสนามแม่เหล็ก ซึ่งเป็นผลมาจากวงจรที่หมุนและหยุดในตำแหน่งสมดุล กล่าวคือ ในตำแหน่งที่โมเมนต์แม่เหล็กถูกชี้นำขนานกับการเหนี่ยวนำแม่เหล็ก (ระนาบของเส้นชั้นความสูงตั้งฉากกับเส้นเหนี่ยวนำ สนามแม่เหล็ก). ถ้าเมื่อวงจรผ่านตำแหน่งสมดุล ทิศทางของกระแสเปลี่ยนไปเป็นทิศตรงกันข้าม ทิศทางของโมเมนต์แม่เหล็กก็จะเปลี่ยนไปด้วย เมื่อผ่านตำแหน่งสมดุลด้วยความเฉื่อยแล้ววงจรจะเลี้ยวอีกครึ่งทาง หากคุณเปลี่ยนทิศทางของกระแสเป็นระยะ วงจรจะเริ่มหมุน การเปลี่ยนแปลงทิศทางของกระแสจะดำเนินการโดยอัตโนมัติโดยใช้อุปกรณ์ที่เรียกว่าตัวสะสม ตัวสะสมประกอบด้วยโลหะกึ่งทรงกระบอกสองกระบอกซึ่งต่อปลายของวงจร ผ่านพวกเขาและเลื่อนหน้าสัมผัส (แปรง) วงจรเชื่อมต่อกับแหล่งกระแส
![]()
ช่วงเวลาที่ยิ่งใหญ่ที่สุดทำหน้าที่ในวงจรซึ่งระนาบนั้นขนานกับการเหนี่ยวนำแม่เหล็ก ดังนั้นหากคุณวางวงจรสองวงจรในแนวตั้งฉากกันและนำปลายของมันไปยังตัวสะสมวงแหวน (รูปที่ 2) แรงบิดจะเพิ่มขึ้นอย่างรวดเร็วและความนุ่มนวลของชิ้นส่วนที่เคลื่อนที่ของเครื่องยนต์ (โรเตอร์) จะเพิ่มขึ้น
ในมอเตอร์อุตสาหกรรม สนามแม่เหล็กถูกสร้างขึ้นโดยขดลวดแม่เหล็กไฟฟ้า ร่องถูกสร้างขึ้นในโรเตอร์ซึ่งมีการหมุนหลายส่วน (แทนที่จะเป็นเฟรม) ส่วนต่าง ๆ ถูกวางในมุมซึ่งกันและกันและปลายของพวกเขาจะถูกนำไปที่ด้านตรงข้ามของตัวสะสมซึ่งแปรงที่เชื่อมต่อกับแหล่งกำเนิดปัจจุบันถูกกด จากแหล่งจ่ายกระแสไฟ แรงดันจะถูกส่งไปยังแม่เหล็กไฟฟ้าของสเตเตอร์ (ส่วนที่อยู่กับที่ของเครื่องยนต์) กระแสจะไหลผ่านแต่ละส่วนก็ต่อเมื่อจานของมันสัมผัสกับแปรง กล่าวคือ เมื่อระนาบของส่วนนี้ขนานกับเวกเตอร์การเหนี่ยวนำแม่เหล็ก ในกรณีนี้ ส่วนต่าง ๆ จะสร้างแรงบิดที่ใหญ่ที่สุดสลับกัน
แม่เหล็กหรือแม่เหล็กไฟฟ้าที่สร้างสนามแม่เหล็กมักเรียกว่าตัวเหนี่ยวนำและโครง (ไขลาน) ซึ่งผ่าน ไฟฟ้า, - สมอ.
ลักษณะการทำงานหลักของมอเตอร์ไฟฟ้าคือแรงบิด M ที่สร้างขึ้นบนเพลามอเตอร์โดยแรงแอมแปร์ที่กระทำต่อขดลวดกระดอง:
โดยที่ I คือกระแสในขดลวด B คือการเหนี่ยวนำของสนามแม่เหล็ก l คือความยาวของตัวนำ r คือรัศมีของโรเตอร์ N คือจำนวนรอบในขดลวด
เครื่องยนต์ดังกล่าว กระแสตรงใช้ในการขนส่ง (ในหัวรถจักรไฟฟ้า รถราง รถเข็น) บนปั้นจั่น ในหลายครัวเรือน อุปกรณ์ไฟฟ้า(เครื่องโกนหนวดไฟฟ้า เครื่องบันทึกเทป ฯลฯ)
ด้วยความช่วยเหลือของมอเตอร์ไฟฟ้ากระแสตรง - สตาร์ท - เครื่องยนต์ของรถยนต์เริ่มทำงาน
Frolova Anna
โครงการนี้เป็นผลมาจากการวิจัยการติดตั้งมอเตอร์ไฟฟ้าที่ง่ายที่สุด
ดาวน์โหลด:
ดูตัวอย่าง:
สาขาของสถาบันการศึกษางบประมาณเทศบาล Sosnovskaya โรงเรียนมัธยมหมายเลข 2 "โรงเรียนพื้นฐาน Krutetskaya"
โครงการ
กระทู้: มอเตอร์ไฟฟ้า
การแข่งขัน "ฟิสิกส์รอบตัวเรา"
การเสนอชื่อ: "ประวัติของกลไก"
นักเรียนชั้น ป.8
สาขาของโรงเรียนมัธยม MBOU Sosnovskaya หมายเลข 2
"โรงเรียน Krutetskaya"
ผู้จัดการงาน:
Rypova Nadezhda อเล็กซานดรอฟนา,
ครูฟิสิกส์
2015
บทนำ
ความเกี่ยวข้อง: ทุกวันนี้แทบไม่มีสาขาของเทคโนโลยีและชีวิตประจำวันที่จะไม่ใช้มอเตอร์ไฟฟ้า ดังนั้นฉันจึงเริ่มสนใจเกี่ยวกับวิธีการทำงานของมอเตอร์ไฟฟ้า และฉันสามารถประกอบโมเดลที่ง่ายที่สุดของมอเตอร์ไฟฟ้าได้อย่างอิสระหรือไม่
วัตถุประสงค์ของการศึกษา: มอเตอร์แม่เหล็กไฟฟ้า
เป้า: ทำความคุ้นเคยกับประวัติและโครงสร้างของมอเตอร์แม่เหล็กไฟฟ้าสร้างแบบจำลองของมอเตอร์แม่เหล็กไฟฟ้าที่ง่ายที่สุดซึ่งเป็นจุดเริ่มต้นสำหรับการสร้างมอเตอร์ไฟฟ้าที่ทันสมัย
งาน:
- ทำความคุ้นเคยกับประวัติการพัฒนามอเตอร์ไฟฟ้า
ค้นหาหลักการทำงานของมอเตอร์ไฟฟ้า
- เพื่อศึกษาขอบเขตของมอเตอร์ไฟฟ้า
- เพื่อสร้างแบบจำลองของมอเตอร์ไฟฟ้า
สนามแม่เหล็กเป็นรูปแบบของสสารที่ล้อมรอบวัตถุที่กำลังเคลื่อนที่ ค่าไฟฟ้า. คำว่า "สนามแม่เหล็ก" ถูกนำมาใช้ครั้งแรกในปี พ.ศ. 2388 โดยนักฟิสิกส์ชาวอังกฤษชื่อฟาราเดย์
แรงที่สนามแม่เหล็กกระทำต่อตัวนำที่มีกระแสไฟฟ้าเรียกว่าแรงแอมแปร์
ทิศทางของเวกเตอร์แรงแอมป์ถูกกำหนดโดยกฎมือซ้าย
ก่อนเริ่มประสบการณ์ ฉันได้รู้จักกับประวัติการสร้างมอเตอร์ไฟฟ้า ทบทวนการออกแบบและการทำงานของเครื่องยนต์ Boris Semyonovich Jacobi และรวบรวมข้อมูลเกี่ยวกับการใช้มอเตอร์ไฟฟ้า
สาระสำคัญของประสบการณ์ของฉัน:
เนื่องจากแหล่งกำเนิดไฟฟ้า ( ที่ชาร์จ) อนุภาคที่มีประจุในตัวนำ (ลวด) เคลื่อนที่อย่างเป็นระเบียบ เมื่อสัมผัสกับสนามแม่เหล็ก วิถีของอนุภาคจะเบี่ยงเบนไปตามกฎ "มือซ้าย" เมื่อทิศทางของกระแสตั้งฉากกับทิศทาง เส้นแรงสนามแม่เหล็ก อนุภาคเคลื่อนที่เป็นวงกลม
ประวัติความเป็นมาของการสร้างมอเตอร์ไฟฟ้า
ประวัติความเป็นมาของการสร้างมอเตอร์ไฟฟ้ามีมาตั้งแต่สมัยโบราณ บุคคลต้องผ่านเส้นทางที่ซับซ้อนเพื่อค้นพบและความรู้เกี่ยวกับกฎฟิสิกส์การสร้างกลไกและเครื่องจักรต่างๆ ขั้นตอนที่สำคัญที่สุดในการพัฒนาอุตสาหกรรมพลังงานไฟฟ้าคือการประดิษฐ์และการใช้มอเตอร์ไฟฟ้า หลักการทำงานของมอเตอร์ไฟฟ้าขึ้นอยู่กับปรากฏการณ์ทางกายภาพ: ขดลวดตัวนำซึ่งกระแสไฟฟ้าไหลผ่านระหว่างแม่เหล็ก เคลื่อนที่ข้ามเส้นแรงของสนามแม่เหล็ก โดยทั่วไปแล้วมอเตอร์ไฟฟ้าจะมีขนาดกะทัดรัดกว่ามอเตอร์อื่นๆ ซึ่งพร้อมทำงานตลอดเวลา สามารถควบคุมได้จากระยะไกล
ประวัติของมอเตอร์ไฟฟ้าเป็นห่วงโซ่ของการค้นพบ การค้นพบ สิ่งประดิษฐ์ที่ซับซ้อนและยาวนาน
ช่วงเริ่มต้นของการพัฒนามอเตอร์ไฟฟ้า (1821-1834) มีความเกี่ยวข้องอย่างใกล้ชิดกับการสร้าง อุปกรณ์ทางกายภาพเพื่อแสดงการแปลงพลังงานไฟฟ้าเป็นพลังงานกลอย่างต่อเนื่อง ในปี ค.ศ. 1821 เอ็ม. ฟาราเดย์ ได้ตรวจสอบปฏิสัมพันธ์ของตัวนำกับกระแสและแม่เหล็ก พบว่ากระแสไฟฟ้าทำให้ตัวนำหมุนรอบแม่เหล็ก หรือแม่เหล็กหมุนรอบตัวนำ การทดลองของฟาราเดย์แสดงให้เห็นถึงความเป็นไปได้ขั้นพื้นฐานในการสร้างมอเตอร์ไฟฟ้า นักวิจัยหลายคนได้เสนอการออกแบบมอเตอร์ไฟฟ้าแบบต่างๆ
มอเตอร์ไฟฟ้ารุ่นแรกมีลักษณะคล้ายกับเครื่องยนต์ไอน้ำ: เครื่องยนต์ J. Henry (1832) และเครื่องยนต์ W. Pagem (1864) มีแขนโยก ข้อเหวี่ยง ก้านสูบ และแกนม้วน (สวิตช์กระแสในโซลินอยด์ที่แทนที่กระบอกสูบ) .
P. Barlow เสนอ "Barlow wheel" ประกอบด้วยแม่เหล็กถาวรและเฟือง หน้าสัมผัสเลื่อนใช้ปรอท และล้อขับเคลื่อนด้วยเซลล์กัลวานิก
เจ. เฮนรีเสนอแบบจำลองเครื่องยนต์ลูกสูบในปี พ.ศ. 2375: แม่เหล็กไฟฟ้าที่เคลื่อนที่ได้ถูกดึงดูดและขับไล่จากแม่เหล็กถาวร การปิดและเปิดแบตเตอรี่ของเซลล์กัลวานิก เขาเหวี่ยง 75 ครั้งต่อนาที มีความพยายามอีกมากในการสร้างเครื่องยนต์ที่มีการเคลื่อนที่แบบโยกของเกราะ อย่างไรก็ตาม ความพยายามที่จะสร้างเครื่องยนต์ที่มีการเคลื่อนที่แบบหมุนของเกราะนั้นกลับกลายเป็นว่าก้าวหน้ามากขึ้น
ขั้นตอนที่สองในการพัฒนามอเตอร์ไฟฟ้า (1834-1860) มีลักษณะเฉพาะด้วยการออกแบบที่มีการเคลื่อนที่แบบหมุนของกระดองเสาที่โดดเด่น อย่างไรก็ตาม แรงบิดบนเพลาของเครื่องยนต์ดังกล่าวมักจะเป็นจังหวะอย่างรวดเร็ว
ในปี พ.ศ. 2377 วท.บ. Jacobi สร้างมอเตอร์ไฟฟ้ากระแสตรงเครื่องแรกของโลก ซึ่งเขาได้ใช้หลักการของการหมุนตรงของส่วนที่เคลื่อนที่ของมอเตอร์ ในปี 1838 เครื่องยนต์นี้ (0.5 กิโลวัตต์) ได้รับการทดสอบบน Neva เพื่อขับเคลื่อนเรือ
กับผู้โดยสาร กล่าวคือ ได้รับครั้งแรก การใช้งานจริง.
การทดสอบการออกแบบมอเตอร์ไฟฟ้าแบบต่างๆ นำโดย B.S. Jacobi และนักวิจัยอื่น ๆ ได้ข้อสรุปดังต่อไปนี้:
- การใช้มอเตอร์ไฟฟ้าขึ้นอยู่กับการลดต้นทุนพลังงานไฟฟ้าโดยตรง กล่าวคือ จากการสร้างเครื่องกำเนิดไฟฟ้าที่ประหยัดกว่าเซลล์กัลวานิก
– มอเตอร์ไฟฟ้าควรมีขนาดเล็กที่สุดเท่าที่จะเป็นไปได้และมีกำลังมากที่สุดเท่าที่จะเป็นไปได้และมีค่าสัมประสิทธิ์มากขึ้น การกระทำที่เป็นประโยชน์.
ขั้นตอนที่สามในการพัฒนามอเตอร์ไฟฟ้า (พ.ศ. 2403-2430) เกี่ยวข้องกับการพัฒนาโครงสร้างที่มีกระดองขั้วแบบวงแหวนและแรงบิดเกือบคงที่
ในขั้นตอนนี้ควรสังเกตมอเตอร์ไฟฟ้าของอิตาลี A. Pacinotti (1860) เครื่องยนต์ประกอบด้วยกระดองวงแหวนที่หมุนอยู่ในสนามแม่เหล็กของแม่เหล็กไฟฟ้า กระแสถูกจ่ายโดยลูกกลิ้ง ขดลวดแม่เหล็กไฟฟ้าเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง (กล่าวคือ เครื่องจักรไฟฟ้ามีแรงกระตุ้นแบบอนุกรม) ขนาดของเครื่องยนต์มีขนาดเล็ก มีแรงบิดเกือบคงที่ ในเครื่องยนต์ Pacinotti อาร์เมเจอร์ของเสาเด่นถูกแทนที่ด้วยขั้วหนึ่งโดยปริยาย
สมอดรัมซึ่งตัวนำคือคนงานประกอบเป็นขดลวดถูกประดิษฐ์ขึ้นในปี พ.ศ. 2415 โดย W. Siemens เท่านั้น หลังจากนั้นอีก 10 ปี ร่องสำหรับม้วนก็ปรากฎขึ้นในเหล็กของสมอเรือ (1882) ดรัมอาร์มาเจอร์ของเครื่อง DC ได้กลายเป็นสิ่งที่เราเห็นได้ในปัจจุบัน ขั้นตอนที่สามในการพัฒนามอเตอร์ไฟฟ้ามีลักษณะโดยการค้นพบและการใช้หลักการของการกระตุ้นตนเองในอุตสาหกรรมซึ่งเกี่ยวข้องกับการที่หลักการของการย้อนกลับของเครื่องจักรไฟฟ้าได้รับการตระหนักและกำหนดในที่สุด แหล่งจ่ายไฟของมอเตอร์ไฟฟ้าเริ่มผลิตจากแหล่งพลังงานไฟฟ้าที่ถูกกว่า - เครื่องกำเนิดไฟฟ้ากระแสตรงแบบแม่เหล็กไฟฟ้า ในปี 1886 มอเตอร์กระแสตรงได้รับคุณสมบัติหลักของการออกแบบที่ทันสมัย ในอนาคตเขาดีขึ้นเรื่อยๆ ตามชนิดของกระแส มอเตอร์ไฟฟ้าเริ่มแบ่งออกเป็นเครื่อง AC และ DC; ตามหลักการของเครื่อง กระแสสลับแบ่งออกเป็นซิงโครนัสและอะซิงโครนัส
มอเตอร์แบบอะซิงโครนัสมีการออกแบบที่เรียบง่าย ต้นทุนต่ำ และเชื่อถือได้ในการใช้งาน เป็นเครื่องยนต์ประเภทที่พบได้บ่อยที่สุด
เครื่องยนต์ BORIS SEMYONOVICH JACOBI
Boris Semenovich Jacobi (Moritz Herman ตามที่เขาถูกเรียกก่อนที่จะมารัสเซีย) เกิดเมื่อวันที่ 21 กันยายน พ.ศ. 2344 ในเมืองพอทสดัม อุดมศึกษาจบการเป็นสถาปนิก-ช่างก่อสร้าง นอกเหนือจากการทำงานในแผนกก่อสร้างของปรัสเซียแล้วจาโคบียังทำงานวิจัยด้านแม่เหล็กไฟฟ้าอย่างกระตือรือร้น ในปี ค.ศ. 1834 เขาได้สร้างแบบจำลองของมอเตอร์ไฟฟ้า
การปรากฏตัวของครั้งแรกเครื่องยนต์จาโคบี แสดงในรูป มอเตอร์ไฟฟ้านี้ทำงานบนหลักการปฏิสัมพันธ์ระหว่างแม่เหล็กไฟฟ้าสองชุด โดยชุดหนึ่งตั้งอยู่บนโครงที่เคลื่อนที่ได้ ส่วนอีกชุดอยู่บนชุดยึดอยู่กับที่
ในฐานะแหล่งพลังงานสำหรับมอเตอร์ไฟฟ้า แบตเตอรีของจาโคบีถูกใช้เป็นเซลล์กัลวานิก มีการใช้สับเปลี่ยนเพื่อเปลี่ยนขั้วของแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้
ตัวสับเปลี่ยนคือส่วนดั้งเดิมของการออกแบบมอเตอร์ไฟฟ้าของจาโคบี โครงสร้างประกอบด้วยสี่ แหวนโลหะติดตั้งอยู่บนเพลาและแยกออกจากมัน แต่ละวงมีสี่หยักหนึ่งในแปดของเส้นรอบวง ช่องเจาะเต็มไปด้วยแถบฉนวน วงแหวนแต่ละวงถูกชดเชยด้วย 45 เมื่อเทียบกับวงแหวนก่อนหน้า
คันโยก 5 ซึ่งเป็นแปรงชนิดหนึ่งเลื่อนไปตามเส้นรอบวงของวงแหวน ปลายอีกด้านของคันโยกถูกแช่ในภาชนะที่เหมาะสมที่มีสารปรอทซึ่งเชื่อมต่อตัวนำจากแบตเตอรี่ ดังนั้น ในแต่ละรอบของแหวน ครั้งที่ถูกฉีก วงจรไฟฟ้า. สำหรับแม่เหล็กไฟฟ้าของจานหมุน ตัวนำที่ติดตั้งบนเพลาของเครื่องจะหลุดออกจากวงแหวน ขดลวดแม่เหล็กไฟฟ้าทั้งหมดของเฟรมคงที่เชื่อมต่อกันเป็นอนุกรมและกระแสในนั้นก็มีทิศทางเดียวกัน
ขดลวดแม่เหล็กไฟฟ้าของจานหมุนก็เชื่อมต่อกันเป็นอนุกรมเช่นกัน แต่ทิศทางของกระแสในนั้นเปลี่ยนไป 8 ครั้งด้วยความช่วยเหลือของเครื่องสับเปลี่ยนระหว่างการหมุนครั้งเดียวของเพลา ดังนั้น ขั้วของแม่เหล็กไฟฟ้าเหล่านี้ก็เปลี่ยน 8 ครั้งต่อการหมุนเพลา และแม่เหล็กไฟฟ้าถูกดึงดูดและผลักกันสลับกันโดยแม่เหล็กไฟฟ้าของโครงยึดตายตัว
ลูกศรในรูประบุทิศทางของกระแสน้ำสำหรับตำแหน่งของเพลาที่กำหนด
การประยุกต์ใช้มอเตอร์ไฟฟ้า
มอเตอร์ไฟฟ้าใช้เป็นส่วนประกอบหลักของระบบขับเคลื่อนไฟฟ้าของเครื่องจักรต่างๆ และเป็นส่วนหนึ่งของการติดตั้งแยกต่างหากซึ่งจำเป็นต้องแปลงพลังงานไฟฟ้าเป็นพลังงานกล (การเคลื่อนไหว) เช่น พัดลมที่มีระบบส่งกำลังด้วยสายพานวี เครื่องตัดหญ้าต่างๆ การปรับเปลี่ยน ฯลฯ มอเตอร์แบบอะซิงโครนัสแรงดันต่ำ วัตถุประสงค์ทั่วไปด้วยกำลัง 0.25 ... 400 กิโลวัตต์ ที่ทั่วโลกเรียกกันว่ามอเตอร์อะซิงโครนัสมาตรฐาน เป็นพื้นฐานของการขับเคลื่อนพลังงานไฟฟ้าที่ใช้ในกิจกรรมของมนุษย์ทุกด้าน การพัฒนาในประเทศอุตสาหกรรมมีความสำคัญอย่างยิ่ง ปัจจุบัน ตลาดซึ่งออกแบบมาเพื่อสะท้อนความสนใจของผู้บริโภค ไม่ได้กำหนดข้อกำหนดเฉพาะสำหรับมอเตอร์แบบอะซิงโครนัสมาตรฐาน ยกเว้นราคา ในเรื่องนี้เพื่อที่จะระบุแนวโน้มในการปรับปรุงของพวกเขาจำเป็นต้องดำเนินการตามข้อกำหนดของตลาดภายนอกและจากความสำเร็จของผู้ผลิตหลักของมอเตอร์แบบอะซิงโครนัสมาตรฐาน
มอเตอร์แบบอะซิงโครนัส - ชนิดที่พบบ่อยที่สุด เครื่องจักรไฟฟ้าซึ่งปัจจุบันใช้ไฟฟ้าประมาณ 40% ของการผลิตทั้งหมด กำลังการผลิตติดตั้งเพิ่มขึ้นอย่างต่อเนื่อง
มอเตอร์แบบอะซิงโครนัสมีการใช้กันอย่างแพร่หลายในการขับเคลื่อนงานโลหะ งานไม้ และเครื่องมือกลประเภทอื่นๆ การตีขึ้นรูปและการกด การทอผ้า การเย็บ การยก เครื่องจักรขนย้ายดิน พัดลม ปั๊ม คอมเพรสเซอร์ เครื่องหมุนเหวี่ยง ในลิฟต์ เครื่องมือช่าง, ในเครื่องใช้ในครัวเรือน ฯลฯ แทบไม่มีสาขาใดของเทคโนโลยีและชีวิตที่จะไม่ใช้มอเตอร์แบบอะซิงโครนัส
มอเตอร์ไฟฟ้าด้วยมือของตัวเอง
ในการสร้างมอเตอร์ไฟฟ้าจากแบตเตอรี่ เราต้องการ:
เครื่องชาร์จ;
คีม;
มีด;
แม่เหล็ก;
ลวด;
ต่อสายไฟด้วยคลิป
บล็อกไม้
สาระสำคัญของประสบการณ์ของฉัน:
เนื่องจากแหล่งกำเนิดไฟฟ้า (แบตเตอรี่) อนุภาคที่มีประจุในตัวนำ (ลวด) จะเคลื่อนที่อย่างเป็นระเบียบ เมื่อสัมผัสกับสนามแม่เหล็ก วิถีของอนุภาคจะเบี่ยงเบนไปตามกฎ "มือซ้าย" เมื่อทิศทางของความแรงกระแสตั้งฉากกับทิศทางของเส้นสนามแม่เหล็ก อนุภาคจะเคลื่อนที่เป็นวงกลม
ขดลวดต้องใช้ลวดทองแดงเปล่าที่มีเส้นผ่านศูนย์กลาง 0.6 ถึง 1 มม. ในการม้วนขดลวด คุณจะต้องใช้โครงทรงกระบอก (แบตเตอรี่) โดยจะพันรอบ 10-15 รอบ โดยปล่อยให้ลวดยาว 40 มม. ที่ปลายแต่ละด้าน ต้องพันปลายลวดที่ว่างไว้รอบ ๆ วงเลี้ยวของขดลวดเพื่อให้จุดหมุนยึดนั้นอยู่ในตำแหน่งที่สมมาตรสัมพันธ์กัน นอกเหนือจากการสร้างสนามแม่เหล็กเพิ่มเติม การหมุนเหล่านี้จะช่วยรักษารูปร่างของขดลวด
ขดลวด (ส่วนที่เคลื่อนที่ของมอเตอร์ไฟฟ้า) วางอยู่บนตัวยึดสองตัว ตัวด้ามทำด้วยลวดเปล่าขนาดเส้นผ่านศูนย์กลาง 1 มม. นอกจากทำหน้าที่รองรับคอยล์แล้ว ตัวจับยึดยังยอมให้กระแสไฟฟ้าไหลผ่านคอยล์ได้
ปลายอิสระของที่ยึดติดอยู่กับขั้วของแบตเตอรี่เพื่อให้เกิดวงปิด ฐานของมอเตอร์ไฟฟ้าเป็นบล็อกไม้ ต้องติดตั้งแม่เหล็กไว้ใกล้กับขดลวด มุมมองทั่วไปของมอเตอร์ไฟฟ้าจะแสดงในรูปในภาคผนวกของงาน
ขดลวดจะต้องได้รับแรงบิดเริ่มต้นโดยบิดเบา ๆ
มอเตอร์ไฟฟ้าและการทำงานของมอเตอร์ สันดาปภายใน
เครื่องยนต์สันดาปภายใน
วันนี้เราไม่สามารถทำได้หากไม่มีรถยนต์ อย่างไรก็ตาม พวกมันมีลักษณะ ขนาด และกำลังต่างกันทั้งหมด แต่หลักการทำงานของเครื่องยนต์นั้นโดยพื้นฐานแล้วจะเหมือนกัน วันนี้เราจะพูดถึงการทำงานของเครื่องยนต์ ท้ายที่สุดอาจมีหลายคนสนใจหลักการทำงานของมัน เครื่องยนต์เป็นกลไกที่ซับซ้อน แต่เราจะเข้าใจองค์ประกอบหลักและองค์ประกอบหลัก
เครื่องยนต์มีสองประเภทหลัก: สองจังหวะและสี่จังหวะ ในเครื่องยนต์สองจังหวะ รอบการทำงานทั้งหมด (กระบวนการของการบริโภคส่วนผสมเชื้อเพลิง ไอเสียก๊าซ การล้าง) เกิดขึ้นระหว่างการหมุนเพลาข้อเหวี่ยงหนึ่งครั้งในสองรอบหลัก เครื่องยนต์ประเภทนี้ไม่มีวาล์ว (เช่นเดียวกับในเครื่องยนต์สันดาปภายในสี่จังหวะ) บทบาทของลูกสูบนั้นเล่นโดยลูกสูบซึ่งเมื่อเคลื่อนที่จะปิดทางเข้าออกและหน้าต่างล้าง ดังนั้นจึงง่ายกว่าในการออกแบบ
พลังของเครื่องยนต์สองจังหวะที่มีขนาดกระบอกสูบและความเร็วของเพลาเท่ากันในทางทฤษฎีนั้นเป็นสองเท่าของเครื่องยนต์สี่จังหวะเนื่องจากรอบการทำงานจำนวนมากขึ้น อย่างไรก็ตาม การใช้จังหวะลูกสูบที่ไม่สมบูรณ์เพื่อการขยายตัว การปลดปล่อยกระบอกสูบจากก๊าซตกค้างที่แย่ที่สุด และค่าใช้จ่ายส่วนหนึ่งของพลังงานที่สร้างขึ้นสำหรับการเป่าทำให้กำลังเพิ่มขึ้นเพียง 60–70%
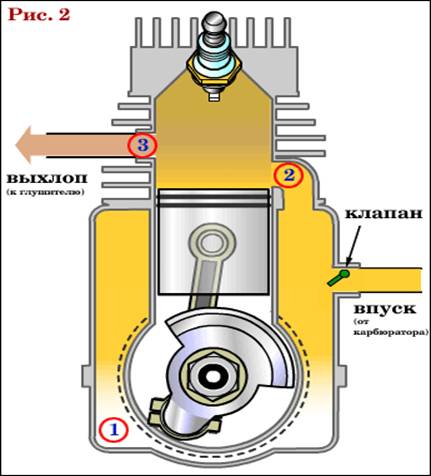
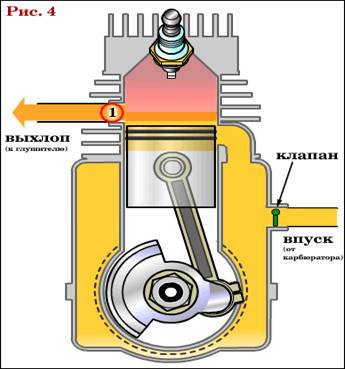
ดังนั้น ให้พิจารณาการออกแบบเครื่องยนต์สันดาปภายในแบบสองจังหวะ ดังแสดงในรูปที่ 1:
เครื่องยนต์ประกอบด้วยข้อเหวี่ยงซึ่งเพลาข้อเหวี่ยงและกระบอกสูบติดตั้งอยู่บนตลับลูกปืนทั้งสองด้าน ลูกสูบเคลื่อนที่ภายในกระบอกสูบ - ถ้วยโลหะล้อมรอบด้วยวงแหวนสปริง (วงแหวนลูกสูบ) ที่ฝังอยู่ในร่องบนลูกสูบ แหวนลูกสูบไม่อนุญาตให้ก๊าซที่เกิดขึ้นระหว่างการเผาไหม้เชื้อเพลิงผ่านระหว่างลูกสูบกับผนังกระบอกสูบ ลูกสูบติดตั้งแท่งโลหะ - พินซึ่งเชื่อมต่อลูกสูบกับก้านสูบ ก้านสูบส่งการเคลื่อนที่แบบลูกสูบเชิงเส้นของลูกสูบไปสู่การเคลื่อนที่แบบหมุนของเพลาข้อเหวี่ยง นอกจากนี้ โดยเฉพาะอย่างยิ่งบนสกู๊ตเตอร์ การเคลื่อนที่แบบหมุนจะถูกส่งไปยังเครื่องแปรผัน
การหล่อลื่นพื้นผิวเสียดทานและแบริ่งภายในเครื่องยนต์สองจังหวะเกิดขึ้นโดยใช้ส่วนผสมของเชื้อเพลิงซึ่งผสมน้ำมันตามปริมาณที่ต้องการ รูปที่ 1 แสดงว่าส่วนผสมของเชื้อเพลิง (สีเหลือง) เข้าสู่ทั้งห้องข้อเหวี่ยงของเครื่องยนต์ (นี่คือช่องที่เพลาข้อเหวี่ยงได้รับการแก้ไขและหมุน) และกระบอกสูบ ไม่มีการหล่อลื่นทุกที่ และถ้ามี ก็จะถูกชะล้างออกด้วยส่วนผสมของเชื้อเพลิง ด้วยเหตุนี้น้ำมันจึงถูกเติมเข้าไปในสัดส่วนที่แน่นอนของน้ำมันเบนซิน ประเภทของน้ำมันที่ใช้เป็นแบบพิเศษสำหรับเครื่องยนต์สองจังหวะโดยเฉพาะ มันจะต้องทนต่ออุณหภูมิสูงและเมื่อเผาด้วยเชื้อเพลิงให้ทิ้งขี้เถ้าไว้ขั้นต่ำ ตอนนี้เกี่ยวกับหลักการทำงาน รอบการทำงานทั้งหมดในเครื่องยนต์ดำเนินการในสองรอบ
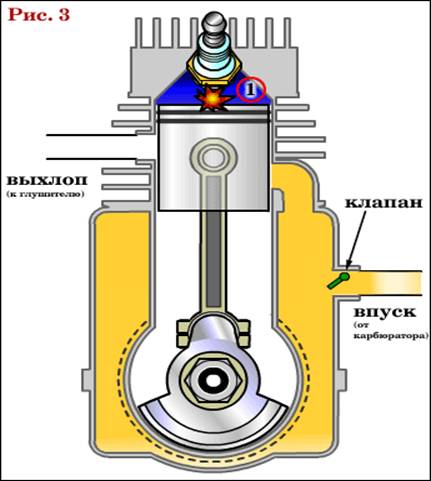
1. จังหวะการบีบอัด ลูกสูบเคลื่อนจากจุดศูนย์กลางตายด้านล่างของลูกสูบ (ในตำแหน่งนี้ ลูกสูบอยู่ในรูปที่ 2 ซึ่งต่อไปนี้จะเรียกว่า BDC โดยย่อ) ไปยังจุดศูนย์กลางตายบนของลูกสูบ (ตำแหน่งลูกสูบในรูปที่ 3 ซึ่งต่อไปนี้จะเรียกว่า TDC) ขั้นแรกให้ปิดกั้นการล้าง 2 จากนั้นจึงปิดหน้าต่างเต้าเสียบ 3 หลังจากที่ลูกสูบปิดหน้าต่างทางออกในกระบอกสูบ การบีบอัดของส่วนผสมที่ติดไฟได้ซึ่งเคยเข้าไปก่อนหน้านี้จะเริ่มต้นขึ้น ในเวลาเดียวกันในห้องข้อเหวี่ยง 1 เนื่องจากความหนาแน่นและหลังจากที่ลูกสูบปิดหน้าต่างล้าง 2 สูญญากาศจะถูกสร้างขึ้นภายใต้ลูกสูบภายใต้การกระทำของส่วนผสมที่ติดไฟได้เข้าสู่ห้องข้อเหวี่ยงจากคาร์บูเรเตอร์ผ่าน หน้าต่างทางเข้าและวาล์วเปิด
2. จังหวะจังหวะ. เมื่อลูกสูบอยู่ใกล้ TDC ส่วนผสมที่ใช้บีบอัด (1 ในรูปที่ 3) จะถูกจุดประกายด้วยไฟฟ้าจากเทียนไข ซึ่งเป็นผลมาจากอุณหภูมิและความดันของก๊าซเพิ่มขึ้นอย่างรวดเร็ว ภายใต้การกระทำของการขยายตัวทางความร้อนของก๊าซ ลูกสูบจะเคลื่อนไปที่ NDC ในขณะที่ก๊าซที่ขยายตัวจะทำงานอย่างมีประโยชน์ ในขณะเดียวกัน เมื่อลงไป ลูกสูบก็สร้าง ความดันสูงในห้องข้อเหวี่ยง (บีบอัดส่วนผสมอากาศและเชื้อเพลิงในนั้น) ภายใต้แรงดัน วาล์วจะปิด จึงป้องกันไม่ให้ส่วนผสมที่ติดไฟได้กลับเข้าไปในท่อร่วมไอดีแล้วเข้าไปในคาร์บูเรเตอร์
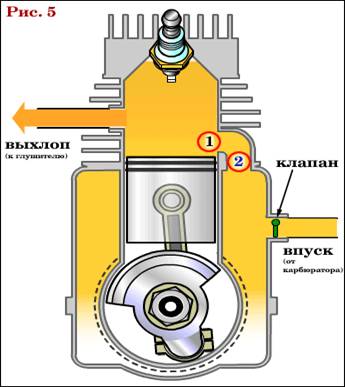
เมื่อลูกสูบไปถึงหน้าต่างทางออก (1 ในรูปที่ 4) ลูกสูบจะเปิดออกและปล่อยก๊าซไอเสียออกสู่บรรยากาศ ความดันในกระบอกสูบจะลดลง เมื่อเคลื่อนที่ต่อไป ลูกสูบจะเปิดช่องไล่อากาศ (1 ในรูปที่ 5) และส่วนผสมที่ติดไฟได้ซึ่งบีบอัดในห้องข้อเหวี่ยงจะเข้าสู่ช่อง (2 ในรูปที่ 5) เติมกระบอกสูบและขับออกจากก๊าซไอเสียที่ตกค้าง
เป็นมูลค่าการกล่าวขวัญถึงหลักการของการจุดระเบิด เนื่องจากส่วนผสมของเชื้อเพลิงต้องใช้เวลาในการจุดไฟ จึงเกิดประกายไฟขึ้นบนเทียนเล็กน้อยก่อนที่ลูกสูบจะไปถึง TDC ตามหลักการแล้ว ยิ่งลูกสูบเคลื่อนที่เร็วขึ้น การจุดระเบิดก็ควรจะเร็วขึ้น เพราะลูกสูบจากช่วงเวลาที่เกิดประกายไฟจะไปถึง TDC เร็วขึ้น มีอุปกรณ์ทางกลและอิเล็กทรอนิกส์ที่เปลี่ยนมุมจุดระเบิดขึ้นอยู่กับความเร็วของเครื่องยนต์ ในทางปฏิบัติสำหรับสกูตเตอร์ได้ถึง 2000 เป็นต้นไป ไม่มีระบบดังกล่าวและกำหนดเวลาการจุดระเบิดตามความเร็วที่เหมาะสม ในสกู๊ตเตอร์บางรุ่น เช่น Honda Dio ZX AF35 จะมีการติดตั้งสวิตช์อิเล็กทรอนิกส์ที่มีการเลื่อนแบบไดนามิก ด้วยเครื่องยนต์จึงพัฒนากำลังมากขึ้น
ข้อดีของเครื่องยนต์สี่จังหวะ
* ทรัพยากรที่มากขึ้น
* เศรษฐกิจที่ดี
* ไอเสียที่สะอาดขึ้น
* ไม่ต้องใช้ระบบไอเสียที่ซับซ้อน
* เสียงรบกวนน้อยลง * ไม่ต้องผสมน้ำมันล่วงหน้ากับน้ำมันเบนซิน
ข้อดีของเครื่องยนต์สองจังหวะ
* ขาดการหล่อลื่นขนาดใหญ่และระบบจ่ายก๊าซสำหรับตัวเลือกน้ำมันเบนซิน
* กำลังสูงในแง่ของปริมาตรการทำงาน 1 ลิตร
* ง่ายกว่าและถูกกว่าในการผลิต
มอเตอร์ไฟฟ้า
ประวัติความเป็นมาของการสร้าง
ในปี ค.ศ. 1821 ในการศึกษาปฏิสัมพันธ์ของตัวนำกับกระแสและแม่เหล็ก ฟาราเดย์พบว่ากระแสไฟฟ้าที่ไหลผ่านตัวนำสามารถทำให้ตัวนำนี้หมุนรอบแม่เหล็กหรือทำให้แม่เหล็กหมุนรอบตัวนำได้ ประสบการณ์นี้พิสูจน์ให้เห็นถึงความเป็นไปได้ขั้นพื้นฐานในการสร้างมอเตอร์ไฟฟ้า
ความเป็นไปได้ของการแปลงพลังงานไฟฟ้าเป็นพลังงานกลได้แสดงให้เห็นในการทดลองอื่นๆ อีกมากมาย ดังนั้นในหนังสือของ P. Barlow เรื่อง "The Study of Magnetic Attractions" ซึ่งตีพิมพ์ในปี พ.ศ. 2367 ได้มีการอธิบายอุปกรณ์ที่เรียกว่า "Barlow's wheel"
ล้อของบาร์โลว์ตามหลักการทำงานเป็นเครื่องจักรไฟฟ้าแบบขั้วเดียวที่ทำงานในโหมดมอเตอร์: อันเป็นผลมาจากการทำงานร่วมกันของสนามแม่เหล็กของแม่เหล็กถาวรและกระแสที่ไหลผ่านเกียร์ทองแดงทั้งสองซึ่งอยู่บนแกนเดียวกัน ล้อ เริ่มหมุนไปในทิศทางเดียวกันอย่างรวดเร็ว บาร์โลว์พบว่าการเปลี่ยนแปลงของหน้าสัมผัสหรือการเปลี่ยนแปลงในตำแหน่งของขั้วแม่เหล็กทำให้เกิดการเปลี่ยนแปลงในทิศทางของการหมุนของล้อทันที
เป็นตัวอย่างหนึ่งของการออกแบบมอเตอร์ไฟฟ้า อุปกรณ์ที่อธิบายในปี 1833 โดยนักวิทยาศาสตร์ชาวอังกฤษ W. Ricci สามารถให้บริการได้ สนามแม่เหล็กในเครื่องยนต์นี้สร้างขึ้นโดยแม่เหล็กเกือกม้าแบบถาวร แม่เหล็กไฟฟ้าถูกวางไว้ระหว่างเสาเหล่านี้บนแกนตั้งโดยผ่านขดลวดที่กระแสไหลผ่าน ทิศทางของกระแสถูกเปลี่ยนเป็นระยะโดยสวิตช์ ปฏิกิริยาของขั้วแม่เหล็กถาวรและแม่เหล็กไฟฟ้าทำให้เกิดการหมุนของแม่เหล็กไฟฟ้ารอบแกน อย่างไรก็ตาม มอเตอร์ไฟฟ้านี้ เนื่องจากการออกแบบดั้งเดิมและใช้พลังงานต่ำ จึงไม่มีความสำคัญในทางปฏิบัติ
ในอุปกรณ์ของ J. Henry นักฟิสิกส์ชาวอเมริกัน การเปลี่ยนแปลงในขั้วของแม่เหล็กไฟฟ้าเกิดขึ้นเนื่องจากการเปลี่ยนแปลงในทิศทางของกระแสที่ไหลผ่านขดลวดของมัน มันทำให้แม่เหล็กไฟฟ้าเคลื่อนที่ในลักษณะโยกที่สม่ำเสมอ ในแบบจำลองที่สร้างขึ้นโดย Henry เอง แม่เหล็กไฟฟ้าทำการหมุน 75 ครั้งต่อนาที กำลังของเครื่องยนต์ประเภทนี้มีขนาดเล็กมาก ประมาณ 0.05 วัตต์
ในปี พ.ศ. 2377-2403 โครงสร้างปรากฏขึ้นพร้อมกับการเคลื่อนที่แบบหมุนของสมอเสาอย่างชัดเจน แรงบิดบนเพลาของเครื่องยนต์ดังกล่าวมักจะเป็นจังหวะอย่างรวดเร็ว
งานที่สำคัญที่สุดในการออกแบบมอเตอร์ไฟฟ้าเป็นของนักวิทยาศาสตร์ชาวรัสเซีย B. S. Yakobi จากการศึกษาการออกแบบมอเตอร์ไฟฟ้าของรุ่นก่อนซึ่งมีการเคลื่อนที่แบบลูกสูบหรือแบบโยกของกระดอง Jacobi ให้ความเห็นเกี่ยวกับหนึ่งในนั้น: "อุปกรณ์ดังกล่าวจะไม่เกินของเล่นที่สนุกสำหรับการตกแต่งตู้ทางกายภาพ" และ ว่า “จะไม่สามารถนำไปใช้ในวงกว้างโดยมีประโยชน์ทางเศรษฐกิจอยู่บ้าง ดังนั้นเขาจึงหันความสนใจไปที่การสร้างมอเตอร์ไฟฟ้าที่ทรงพลังยิ่งขึ้นด้วยการเคลื่อนที่แบบหมุนของกระดอง
ในปี ค.ศ. 1834 จาโคบีได้สร้างและอธิบายมอเตอร์ไฟฟ้าที่ทำงานบนหลักการดึงดูดและแรงผลักระหว่างแม่เหล็กไฟฟ้า เครื่องยนต์นี้มีแม่เหล็กไฟฟ้ารูปตัวยูสองกลุ่ม ซึ่งกลุ่มหนึ่งตั้งอยู่บนโครงตายตัว และอีกกลุ่มที่คล้ายกันบนจานหมุน ใช้แบตเตอรีเซลล์กัลวานิกเป็นแหล่งจ่ายกระแสไฟให้กับแม่เหล็กไฟฟ้า เครื่องสับเปลี่ยนถูกใช้เพื่อสลับขั้วของแม่เหล็กไฟฟ้าที่เคลื่อนที่ได้
จาโคบีสร้างมอเตอร์ไฟฟ้าเครื่องแรกในเดือนพฤษภาคม พ.ศ. 2377 และในเดือนพฤศจิกายนปีเดียวกัน เขาได้นำเสนอรายงานเกี่ยวกับอุปกรณ์นี้ต่อ Paris Academy of Sciences มันถูกอ่านในที่ประชุมของ Academy ในเดือนธันวาคม พ.ศ. 2377 และเผยแพร่ทันที
ในปี ค.ศ. 1837 ช่างเทคนิคชาวอเมริกัน ที. ดาเวนพอร์ต ได้สร้างมอเตอร์ไฟฟ้าด้วยการหมุนของกระดองโดยตรง โดยที่แม่เหล็กไฟฟ้าที่เคลื่อนที่ได้จะมีปฏิสัมพันธ์กับแม่เหล็กถาวรติดแน่น
หลักการทำงาน
มอเตอร์กระแสตรงใช้ในไดรฟ์ไฟฟ้าที่ต้องการการควบคุมความเร็วที่หลากหลาย ความแม่นยำสูงในการรักษาความเร็วของการหมุนของไดรฟ์ การควบคุมความเร็วจากค่าปกติ
มอเตอร์กระแสตรงเป็นอย่างไร
การทำงานของมอเตอร์ไฟฟ้ากระแสตรงขึ้นอยู่กับปรากฏการณ์ของการเหนี่ยวนำแม่เหล็กไฟฟ้า จากพื้นฐานทางวิศวกรรมไฟฟ้า เป็นที่ทราบกันดีอยู่แล้วว่าตัวนำที่มีกระแสไฟฟ้าอยู่ในสนามแม่เหล็กอยู่ภายใต้แรงที่กำหนดโดยกฎมือซ้าย:
โดยที่ I คือกระแสที่ไหลผ่านตัวนำ B คือการเหนี่ยวนำของสนามแม่เหล็ก L คือความยาวของตัวนำ
เมื่อตัวนำข้ามเส้นสนามแม่เหล็กของเครื่อง จะเกิดแรงเคลื่อนไฟฟ้าในนั้น ซึ่งสัมพันธ์กับกระแสในตัวนำนั้นพุ่งตรงเข้าหามัน ดังนั้นจึงเรียกว่าการย้อนกลับหรือการตอบโต้ (ตัวนับ e.d. ) พลังงานไฟฟ้าในมอเตอร์จะถูกแปลงเป็นพลังงานกลและใช้บางส่วนในการให้ความร้อนแก่ตัวนำไฟฟ้า
โครงสร้าง มอเตอร์ไฟฟ้ากระแสตรงทั้งหมดประกอบด้วยตัวเหนี่ยวนำและอาร์เมเจอร์คั่นด้วยช่องว่างอากาศ
ตัวเหนี่ยวนำมอเตอร์กระแสตรงใช้เพื่อสร้างสนามแม่เหล็กที่อยู่กับที่ของเครื่องและประกอบด้วยโครง เสาหลักและเสาเพิ่มเติม เฟรมใช้สำหรับยึดเสาหลักและเสาเพิ่มเติมและเป็นองค์ประกอบของวงจรแม่เหล็กของเครื่อง บนเสาหลักมีขดลวดกระตุ้นที่ออกแบบมาเพื่อสร้างสนามแม่เหล็กของเครื่อง บนเสาเพิ่มเติมจะมีขดลวดพิเศษที่ทำหน้าที่ปรับปรุงสภาพการสลับ
อาร์เมเจอร์ของมอเตอร์กระแสตรงประกอบด้วยระบบแม่เหล็กที่ประกอบขึ้นจากแผ่นที่แยกจากกัน ขดลวดทำงานที่วางอยู่ในร่อง และตัวสะสมที่ใช้ในการจ่ายไฟ การทำงานที่คดเคี้ยวกระแสตรง.
ตัวสะสมคือกระบอกสูบที่ติดตั้งบนเพลามอเตอร์และเลือกจากแผ่นทองแดงที่แยกจากกัน มีส่วนที่ยื่นออกมา - กระทงบนตัวสะสมซึ่งส่วนปลายของส่วนที่คดเคี้ยวของกระดองนั้นถูกบัดกรี การกำจัดกระแสไฟออกจากตัวสะสมจะดำเนินการโดยใช้แปรงที่ให้หน้าสัมผัสแบบเลื่อนกับตัวสะสม แปรงได้รับการแก้ไขในที่ยึดแปรงซึ่งถือไว้ในตำแหน่งที่แน่นอนและให้การกดแปรงที่จำเป็นบนพื้นผิวของตัวสะสม แปรงและที่ยึดแปรงจับจ้องอยู่ที่แนวขวางที่เชื่อมต่อกับตัวเรือนมอเตอร์
การสลับในมอเตอร์กระแสตรง
ระหว่างการทำงานของมอเตอร์กระแสตรง แปรงจะเลื่อนผ่านพื้นผิวของตัวสะสมแบบหมุน เคลื่อนจากแผ่นสะสมหนึ่งไปยังอีกแผ่นหนึ่งตามลำดับ ในกรณีนี้ส่วนขนานของขดลวดกระดองจะถูกเปลี่ยนและกระแสในนั้นจะเปลี่ยนไป การเปลี่ยนแปลงของกระแสจะเกิดขึ้นในเวลาที่ขดลวดของขดลวดลัดวงจรด้วยแปรง กระบวนการเปลี่ยนและปรากฏการณ์ที่เกี่ยวข้องกับกระบวนการนี้เรียกว่าการเปลี่ยน
ในขณะที่เปลี่ยนในส่วนลัดวงจรของขดลวด e ถูกเหนี่ยวนำภายใต้อิทธิพลของสนามแม่เหล็กของตัวเอง ดีเอส การเหนี่ยวนำตนเอง ผลลัพธ์ e. ดีเอส ทำให้เกิดกระแสเพิ่มเติมในส่วนที่ลัดวงจร ซึ่งสร้างการกระจายความหนาแน่นกระแสบนพื้นผิวสัมผัสของแปรงไม่สม่ำเสมอ เหตุการณ์นี้ถือเป็นสาเหตุหลักของการเกิดประกายไฟของตัวสะสมใต้แปรง คุณภาพของสวิตชิ่งจะถูกประเมินโดยระดับของการเกิดประกายไฟภายใต้ขอบวิ่งของแปรง และพิจารณาจากมาตราส่วนของระดับการเกิดประกายไฟ
วิธีกระตุ้นมอเตอร์กระแสตรง
การกระตุ้นของเครื่องจักรไฟฟ้าเป็นที่เข้าใจกันว่าเป็นการสร้างสนามแม่เหล็กในนั้น ซึ่งจำเป็นสำหรับการทำงานของมอเตอร์ไฟฟ้า
ตามวิธีการกระตุ้นมอเตอร์ไฟฟ้ากระแสตรงแบ่งออกเป็นสี่กลุ่ม:
1. ด้วยแรงกระตุ้นที่เป็นอิสระซึ่งขดลวดกระตุ้นของ NOV นั้นขับเคลื่อนโดยแหล่ง DC ภายนอก
2. ด้วยแรงกระตุ้นแบบขนาน (shunt) ซึ่งขดลวดกระตุ้น SHOV เชื่อมต่อแบบขนานกับแหล่งพลังงานของขดลวดกระดอง
3. ด้วยการกระตุ้นแบบอนุกรม (series) ซึ่งขดลวดกระตุ้นของ SOW นั้นเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง
4. เครื่องยนต์ที่มีแรงกระตุ้นแบบผสม (สารประกอบ) ซึ่งมี SOV แบบอนุกรมและ SOV แบบขนานของขดลวดกระตุ้น
การสตาร์ทมอเตอร์กระแสตรง
ในช่วงเริ่มต้นของการสตาร์ทเครื่องยนต์ สมอจะอยู่กับที่และตัวนับ-e ดีเอส และแรงดันกระดองเป็นศูนย์ ดังนั้น Ip = U / Rya
ความต้านทานของวงจรกระดองมีขนาดเล็ก ดังนั้นกระแสเริ่มต้นคือ 10 ถึง 20 เท่าหรือมากกว่ากระแสที่กำหนด สิ่งนี้สามารถทำให้เกิดแรงอิเล็กโทรไดนามิกที่สำคัญในขดลวดกระดองและความร้อนสูงเกินไป ดังนั้นเครื่องยนต์จึงเริ่มทำงานโดยใช้รีโอสแตตสตาร์ท - ความต้านทานแบบแอคทีฟที่รวมอยู่ในวงจรกระดอง
มอเตอร์สูงถึง 1 กิโลวัตต์ช่วยให้สตาร์ทได้โดยตรง
ค่าความต้านทานของลิโน่สตาร์ทจะถูกเลือกตามกระแสเริ่มต้นที่อนุญาตของมอเตอร์ รีโอสแตทถูกเพิ่มความเร็วเพื่อปรับปรุงความนุ่มนวลในการสตาร์ทมอเตอร์ไฟฟ้า
ในช่วงเริ่มต้นของการเริ่มต้น จะมีการแนะนำความต้านทานทั้งหมดของลิโน่สเตท เมื่อความเร็วของเกราะเพิ่มขึ้น counter-e จะเกิดขึ้น d.s. ซึ่งจำกัด กระแสเริ่มต้น. ค่อยๆถอดความต้านทานของลิโน่ออกจากวงจรกระดองทีละน้อยแรงดันไฟฟ้าที่จ่ายให้กับกระดองจะเพิ่มขึ้น ความเร็วของมอเตอร์กระแสตรงสามารถควบคุมได้สามวิธี: โดยการเปลี่ยนฟลักซ์การกระตุ้นของมอเตอร์ โดยการเปลี่ยนแรงดันไฟฟ้าที่ใช้กับมอเตอร์ และโดยการเปลี่ยนความต้านทานในวงจรกระดอง
การควบคุมสองวิธีแรกนั้นใช้กันอย่างแพร่หลายมากที่สุด วิธีที่สามนั้นไม่ค่อยได้ใช้: ไม่ประหยัด ในขณะที่ความเร็วของเครื่องยนต์ขึ้นอยู่กับความผันผวนของโหลดอย่างมาก ลักษณะทางกลของมอเตอร์กระแสตรงที่มีวิธีการควบคุมความเร็วแบบต่างๆ
เส้นหนาคือการพึ่งพาความเร็วตามธรรมชาติของแรงบิดบนเพลาหรือซึ่งเหมือนกันกับกระแสของกระดอง เส้นตรงของลักษณะทางกลตามธรรมชาติเบี่ยงเบนไปจากเส้นประแนวนอนบ้าง ค่าเบี่ยงเบนนี้เรียกว่าความไม่เสถียร ไม่แข็งกระด้าง บางครั้งก็คงที่ กลุ่มของเส้นที่ไม่ขนานกัน I สอดคล้องกับการควบคุมความเร็วโดยการกระตุ้น, เส้นคู่ขนาน II ได้มาจากการเปลี่ยนแรงดันไฟฟ้าของกระดองและในที่สุดพัดลม III เป็นผลมาจากการแนะนำเกราะต้านทานแบบแอคทีฟในวงจร
ค่าของกระแสกระตุ้นของมอเตอร์กระแสตรงสามารถปรับได้โดยใช้ลิโน่หรืออุปกรณ์ใดๆ ที่ ความต้านทานที่ใช้งานซึ่งสามารถเปลี่ยนแปลงค่าได้ เช่น ทรานซิสเตอร์ ด้วยความต้านทานในวงจรที่เพิ่มขึ้นกระแสกระตุ้นจะลดลงความเร็วของเครื่องยนต์จะเพิ่มขึ้น เมื่อฟลักซ์แม่เหล็กอ่อนลง ลักษณะทางกลอยู่เหนือธรรมชาติ (กล่าวคือ อยู่เหนือลักษณะเฉพาะในกรณีที่ไม่มีลิโน่) การเพิ่มความเร็วของเครื่องยนต์ทำให้เกิดประกายไฟเพิ่มขึ้นภายใต้แปรง นอกจากนี้ เมื่อมอเตอร์ไฟฟ้าทำงานโดยมีการไหลที่ลดลง ความเสถียรของการทำงานจะลดลง โดยเฉพาะอย่างยิ่งเมื่อโหลดแบบแปรผันบนเพลา ดังนั้นขีดจำกัดของการควบคุมความเร็วในลักษณะนี้จะต้องไม่เกิน 1.25 - 1.3 ของค่าที่กำหนด
การควบคุมแรงดันไฟฟ้าแบบแปรผันต้องใช้แหล่งจ่ายกระแสคงที่ เช่น เครื่องกำเนิดหรือตัวแปลง กฎระเบียบดังกล่าวใช้ในระบบขับเคลื่อนไฟฟ้าอุตสาหกรรมทั้งหมด: เครื่องกำเนิดไฟฟ้า - มอเตอร์ DC (G - DPT), เครื่องขยายเสียงเครื่องจักรไฟฟ้า - มอเตอร์ DC (EMU - DPT), เครื่องขยายสัญญาณแม่เหล็ก - มอเตอร์ DC (MU - DPT), ตัวแปลงไทริสเตอร์ - มอเตอร์กระแสตรง (T - DPT)
การเบรกของมอเตอร์กระแสตรง
ในไดรฟ์ไฟฟ้าที่มีมอเตอร์กระแสตรง มีการเบรกสามวิธี: การเบรกแบบไดนามิก รีเจนเนอเรทีฟ และกระแสย้อนกลับ
การเบรกแบบไดนามิกของมอเตอร์กระแสตรงนั้นกระทำโดยการลัดวงจรขดลวดกระดองของมอเตอร์หรือผ่านตัวต้านทาน ในกรณีนี้ มอเตอร์กระแสตรงเริ่มทำงานเป็นเครื่องกำเนิดไฟฟ้า โดยแปลงพลังงานที่เก็บไว้ พลังงานกลเป็นไฟฟ้า. พลังงานนี้ถูกปล่อยออกมาในรูปของความร้อนในความต้านทานที่ขดลวดกระดองปิด การเบรกแบบไดนามิกช่วยหยุดมอเตอร์ไฟฟ้าได้อย่างแม่นยำ
การเบรกแบบสร้างใหม่ของมอเตอร์กระแสตรงเกิดขึ้นเมื่อมอเตอร์ไฟฟ้าที่เชื่อมต่อกับเครือข่ายถูกหมุนโดยแอคชูเอเตอร์ด้วยความเร็วที่เกินความเร็วรอบเดินเบาในอุดมคติ แล้ว อี. d.s. เหนี่ยวนำในขดลวดของมอเตอร์มีค่าเกินกว่าแรงดันไฟหลัก กระแสในขดลวดของมอเตอร์จะเปลี่ยนทิศทางไปในทิศทางตรงกันข้าม มอเตอร์ไฟฟ้าสลับการทำงานในโหมดเครื่องกำเนิดไฟฟ้าโดยให้พลังงานแก่เครือข่าย ในเวลาเดียวกัน แรงบิดในการเบรกก็ปรากฏขึ้นบนเพลาของมัน โหมดดังกล่าวสามารถรับได้ในไดรฟ์ของกลไกการยกเมื่อลดภาระ เช่นเดียวกับเมื่อควบคุมความเร็วของเครื่องยนต์และระหว่างกระบวนการเบรกในไดรฟ์ไฟฟ้ากระแสตรง
การเบรกแบบสร้างใหม่ของมอเตอร์กระแสตรงเป็นวิธีที่ประหยัดที่สุด เนื่องจากจะส่งกระแสไฟฟ้ากลับคืนสู่กริด ในการขับเคลื่อนไฟฟ้าของเครื่องมือเครื่องตัดโลหะ วิธีนี้ใช้สำหรับควบคุมความเร็วในระบบ G-DPT และ EMU-DPT
การเบรกโดยการรวมตัวของมอเตอร์กระแสตรงเข้าด้วยกันนั้นทำได้โดยการเปลี่ยนขั้วของแรงดันและกระแสในขดลวดกระดอง เมื่อกระแสของกระดองโต้ตอบกับสนามแม่เหล็กของสนามที่คดเคี้ยว แรงบิดในการเบรกจะถูกสร้างขึ้น ซึ่งจะลดลงเมื่อความเร็วของมอเตอร์ลดลง เมื่อความเร็วของมอเตอร์ลดลงเป็นศูนย์ มอเตอร์จะต้องถูกตัดการเชื่อมต่อจากเครือข่าย มิฉะนั้น มอเตอร์จะเริ่มหมุนไปในทิศทางตรงกันข้าม
สถาบันการศึกษาเทศบาล
เฉลี่ย โรงเรียนครบวงจรลำดับที่ 9.ก. เบิร์ดสค์
หัวข้อ: "การพัฒนาเครื่องยนต์และบทบาทในความก้าวหน้าทางวิทยาศาสตร์และเทคโนโลยี"
ในหัวข้อ "ฟิสิกส์"
เสร็จสมบูรณ์โดย: Tabakov Konstantin Andreevich,
นักเรียนชั้นประถมศึกษาปีที่ 9
เมืองเบิร์ดสค์ 2552
บทนำ
- เครื่องอบไอน้ำ.
- เครื่องยนต์ความร้อนเครื่องแรกของ Polzunov การสร้างเครื่องจักรไอน้ำที่ใช้งานได้จริงเครื่องแรกโดย James Watt ผลงานชิ้นแรกของวัต ผลงานที่สองของวัต
- มอเตอร์วาล์ว สเตเตอร์. โรเตอร์ หลักการทำงาน ข้อดีและข้อเสีย
- ประวัติความเป็นมาของการสร้าง โครงงาน. เทอร์โบ การพัฒนาเครื่องยนต์ไอพ่น
- การอ่านวรรณกรรมประเภทต่างๆ ดึงข้อมูลที่จำเป็นจากมัน ทำความคุ้นเคยกับประวัติของการปรากฏตัวของเครื่องยนต์ต่างๆ ค้นหาว่าอุปกรณ์เหล่านี้ใช้ในอุตสาหกรรมใดในช่วงเวลาที่ต่างกัน แสดงข้อดีของเครื่องยนต์เหนืออุปกรณ์อื่นๆ ที่คล้ายคลึงกัน
ความเกี่ยวข้องของหัวข้อ
เมื่อ James Watt คิดค้นและสร้างเครื่องจักรไอน้ำที่ใช้งานได้จริง เขาอาจนำวิทยาศาสตร์ไปสู่การพัฒนาระดับใหม่โดยไม่รู้ตัว เพราะมันเป็นอุปกรณ์ที่น่าทึ่งเหล่านี้ที่กลายเป็น "กลไกของความก้าวหน้าของโลก" เครื่องยนต์เปลี่ยนวิธีที่เรามองไปหลายๆ อย่างโดยสิ้นเชิง สิ่งของ. ให้โอกาสใหม่ในภาคอุตสาหกรรม ก้าวไปข้างหน้าอย่างมาก ฉันเชื่อว่าการปรับปรุงและพัฒนาเครื่องยนต์จะให้โอกาสใหม่ๆ แก่เราในหลาย ๆ ด้านของกิจกรรม ในสมัยของเรา สิ่งนี้สำคัญมาก เนื่องจากสถานการณ์ทางนิเวศวิทยาในโลกเสื่อมโทรมลงอย่างมาก และเราจำเป็นต้องสร้างมอเตอร์ไฟฟ้าที่เป็นมิตรต่อสิ่งแวดล้อมซึ่งจะไม่ก่อให้เกิดมลพิษต่อสิ่งแวดล้อม ผู้ชายใน สังคมสมัยใหม่โดยทั่วไปแล้วเป็นไปไม่ได้ที่จะจินตนาการได้หากไม่มีเครื่องยนต์สันดาปภายใน และคุณทุกคนรู้ว่าฉันหมายถึงอะไร แน่นอนว่าสิ่งเหล่านี้คือรถยนต์ รถจักรยานยนต์ และยานพาหนะอื่นๆ ของเราที่ใช้เครื่องยนต์สันดาปภายใน ในรถยนต์สมัยใหม่ เครื่องยนต์สันดาปภายในมักถูกรวมเข้ากับมอเตอร์ไฟฟ้า ซึ่งให้ประสิทธิภาพด้านสิ่งแวดล้อมที่ดีที่สุด การเลือกหัวข้อนี้ ฉันอาศัยความจริงที่ว่าหัวข้อนี้จะเกี่ยวข้องโดยตรงกับอาชีพในอนาคตของฉัน ฉันกังวลเกี่ยวกับความเป็นมิตรต่อสิ่งแวดล้อมและความเก่งกาจของเทคนิคนี้ และในอนาคตฉันต้องการพยายามช่วยปรับปรุงพวกเขา ข้อมูลจำเพาะและคุณภาพ ท้ายที่สุดความนิยมและความเก่งกาจของพวกเขาทำให้เครื่องยนต์ "เครื่องยนต์แห่งความก้าวหน้าของโลก"
บทนำ.
ศตวรรษที่ 20 เป็นโลกแห่งเทคโนโลยี เครื่องจักรอันทรงพลังสกัดถ่านหิน แร่ น้ำมันนับล้านตันจากส่วนลึกของดิน โรงไฟฟ้าที่ทรงพลังผลิตไฟฟ้าได้หลายพันล้านกิโลวัตต์-ชั่วโมง โรงงานและโรงงานหลายพันแห่งผลิตเสื้อผ้า วิทยุ โทรทัศน์ จักรยาน รถยนต์ นาฬิกา และผลิตภัณฑ์ที่จำเป็นอื่นๆ รถไฟ เรือ เครื่องบิน ขนส่งเราด้วยความเร็วสูงข้ามทวีปและมหาสมุทร และอยู่เหนือเรา เหนือกว่า ชั้นบรรยากาศของโลก, บินจรวดและดาวเทียมโลกเทียม ทั้งหมดนี้ใช้ไม่ได้หากปราศจากความช่วยเหลือจากเครื่องยนต์ มนุษย์เริ่มการพัฒนาของเขาด้วยการจัดสรรผลิตภัณฑ์จากธรรมชาติที่เสร็จแล้ว แต่ในขั้นแรกของการพัฒนาเขาเริ่มใช้เครื่องมือประดิษฐ์ ด้วยการพัฒนาการผลิต เงื่อนไขสำหรับการเกิดขึ้นและการพัฒนาเครื่องจักรเริ่มเป็นรูปเป็นร่าง ในตอนแรก เครื่องจักรก็เหมือนกับเครื่องมือ ช่วยคนในการทำงานของเขาเท่านั้น จากนั้นพวกเขาก็ค่อยๆ เข้ามาแทนที่เขา มนุษย์เริ่มมองหาแหล่งพลังงานอื่น นักประดิษฐ์ทำงานเป็นเวลานาน ทดสอบเครื่องจักรหลายเครื่อง และในที่สุดก็มีการสร้างเครื่องยนต์ใหม่ มันเป็นเครื่องยนต์ไอน้ำ เขาเริ่มเคลื่อนไหวเครื่องจักรและเครื่องมือเครื่องจักรจำนวนมากในโรงงานและโรงงาน ที่ ต้นXIXศตวรรษ เครื่องจักรไอน้ำบนบกเครื่องแรกถูกประดิษฐ์ขึ้น ยานพาหนะ- หัวรถจักร แต่เครื่องจักรไอน้ำนั้นซับซ้อน เทอะทะ และมีราคาแพง การขนส่งทางกลที่พัฒนาอย่างรวดเร็วนั้นต้องการเครื่องยนต์ที่ต่างออกไป ซึ่งมีขนาดเล็กและราคาถูก ในปี 1860 Lenoir ชาวฝรั่งเศสใช้องค์ประกอบโครงสร้างของเครื่องยนต์ไอน้ำ เชื้อเพลิงก๊าซ และประกายไฟฟ้าสำหรับการจุดระเบิด ได้ออกแบบเครื่องยนต์สันดาปภายในเครื่องแรกที่พบว่าใช้งานได้จริง เครื่องยนต์ทั้งหมดเหล่านี้ต้องการเชื้อเพลิง และนักวิทยาศาสตร์ในขณะเดียวกันก็ทำงานเกี่ยวกับการประดิษฐ์เครื่องยนต์ที่ทำงานด้วยไฟฟ้า ซึ่งเป็นมอเตอร์ไฟฟ้าที่เงียบและมีขนาดเล็ก มอเตอร์ไฟฟ้าตัวแรกได้รับการออกแบบโดยนักวิทยาศาสตร์ชาวรัสเซีย B.S. จาโคบี.
ฉันอุทิศงานให้กับกระบวนการสร้างและพัฒนาเครื่องมือ
เครื่องอบไอน้ำ.
I. I. เครื่องยนต์ความร้อนเอนกประสงค์ตัวแรกของ Polzunova
เครื่องยนต์ความร้อนสากลเครื่องแรกถูกประดิษฐ์ขึ้นในรัสเซียในยุค 60 ของศตวรรษที่สิบแปด วิศวกรความร้อนชาวรัสเซียที่โดดเด่น Ivan Ivanovich Polzunov (1729-1766) Polzunov คุ้นเคยกับคำอธิบายของเครื่อง Savery และ Nyokomena รวมถึงผลงานของ M.V. Lomonosov เกี่ยวกับวิศวกรรมความร้อน จากการวิจัยของเขา I. I. Polzunov ในปี ค.ศ. 1763 ได้พัฒนาโครงการสำหรับการสร้าง "เครื่องดับเพลิงสำหรับความต้องการของโรงงาน" เขาตั้งใจที่จะสร้างเครื่องจักรไอน้ำบรรยากาศสองสูบ ตามโครงการของ Polzunov ไอน้ำจากหม้อไอน้ำ (1) ถูกส่งไปยังกระบอกสูบด้านซ้าย (2) ซึ่งยกลูกสูบ (3) ไปที่ตำแหน่งบนสุด จากนั้นมีการฉีดเจ็ตจากถังเข้าไปในกระบอกสูบ น้ำเย็น(4) ซึ่งนำไปสู่การควบแน่นของไอ อันเป็นผลมาจากความดันบรรยากาศบนลูกสูบลูกสูบจึงลอยขึ้นในกระบอกสูบด้านขวาซึ่งเป็นผลมาจากแรงดันไอน้ำ การจ่ายน้ำและไอน้ำในเครื่องของ Polzunov ดำเนินการโดยอุปกรณ์อัตโนมัติพิเศษ (5) แรงทำงานต่อเนื่องจากลูกสูบของเครื่องถูกส่งไปยังรอก (6) ซึ่งติดตั้งอยู่บนเพลา จากนั้นการเคลื่อนที่จะถูกส่งไปยังอุปกรณ์จ่ายไอน้ำและไอน้ำ ปั๊มป้อน และไปยังเพลาทำงานด้วย เครื่องเป่าลมถูกตั้งให้เคลื่อนที่ I. I. Polzunov ในร่างแรกของเครื่องยนต์ไอน้ำ (1763) ได้สร้างงานสร้างเครื่องยนต์ความร้อนสากลอย่างชัดเจน ด้วยความยากลำบากอย่างมาก เนื่องจากมีการจัดสรรเงินทุนไม่เพียงพอสำหรับการสร้างเครื่องจักร Polzunov ด้วยความช่วยเหลือของนักเรียนหลายคนจึงเริ่มต้นในปี 1764 เพื่อสร้างเครื่องจักรของเขาเอง และในปี 1765 ก็ได้ถูกสร้างขึ้น ควรสังเกตว่าเครื่องนี้แตกต่างอย่างมากจากโครงการแรกของ Polzunov เครื่องจักรที่สร้างขึ้นสามารถแก้ไขปัญหาเฉพาะได้เท่านั้น: ไดรฟ์ได้รับการออกแบบสำหรับเตาเผาหลายตัวและช่วยให้มั่นใจได้ว่าการสิ้นเปลืองเชื้อเพลิงต่ำ Polzunov ไม่สามารถอยู่ได้จนถึงการเปิดตัวเครื่อง ทำงานหนักเกินไปในเดือนพฤษภาคม พ.ศ. 2309 เขาเสียชีวิตจากการบริโภคชั่วคราว เครื่องเปิดตัวในเดือนสิงหาคม พ.ศ. 2309 เท่านั้น เครื่องทำงานประมาณสองเดือนซึ่งแสดงประสิทธิภาพ: ใน 43 วันของการทำงานได้ประมาณ 12,000 รูเบิล มาถึงแล้ว. แต่ในเดือนพฤศจิกายน พ.ศ. 2309 หม้อน้ำรั่วรถก็หยุดและอีกไม่กี่ปีต่อมาก็พังและลืมไป แต่เครื่องยนต์ตัวแรกที่ใช้งานได้จริงนั้นถูกคิดค้นโดย James Watt ฉันจะบอกเกี่ยวกับมันตอนนี้
การประดิษฐ์เครื่องทำความร้อนอเนกประสงค์ที่ใช้งานได้จริง ผลงานของเจมส์ วัตต์
ที่  เครื่องยนต์ไอน้ำอเนกประสงค์ที่เหมาะสำหรับการใช้งานจริงถูกคิดค้นโดยวิศวกรความร้อนชาวอังกฤษ James Watt (1736-1819) วัตต์เริ่มทำงานกับเครื่องยนต์ไอน้ำในปี พ.ศ. 2307 เมื่อเขาได้รับมอบหมายให้แก้ไขแบบจำลองเครื่องยนต์ไอน้ำบรรยากาศของนิวโคเมน เขาดึงความสนใจไปที่การใช้ไอน้ำที่ไม่ก่อผลในปริมาณมาก และด้วยเหตุนี้ เชื้อเพลิงในรถ จากการตรวจสอบสาเหตุของปรากฏการณ์นี้ Watt ได้ข้อสรุปว่าการทำงานที่ดีของเครื่องจักรบรรยากาศขึ้นอยู่กับการปฏิบัติตามเงื่อนไขสองประการ: ประการแรกเพื่อให้ได้สุญญากาศที่แข็งแกร่งภายใต้ลูกสูบจำเป็นต้องกลั่นตัวไอน้ำใน กระบอกสูบให้สมบูรณ์ที่สุดเท่าที่จะเป็นไปได้และเพื่อให้กระบอกสูบเย็นลงมากที่สุด ประการที่สอง เพื่อหลีกเลี่ยงการสูญเสียไอน้ำที่ไม่ก่อผล จำเป็นต้องปล่อยให้ลูกสูบเคลื่อนจากหม้อไอน้ำไปยังกระบอกสูบร้อนที่ไม่มีการระบายความร้อน ในตอนแรกดูเหมือนเป็นไปไม่ได้ในทางเทคนิคที่จะปฏิบัติตามเงื่อนไขทั้งสองนี้ในเวลาเดียวกัน หลังจากการศึกษาและการทดลองในเชิงลึกเป็นชุด ในที่สุด Watt ก็สามารถแก้ไขปัญหาทางเทคนิคที่ซับซ้อนนี้ได้ เขาเสนอให้กลั่นไอน้ำในถังคอนเดนเซอร์แยกต่างหากที่เชื่อมต่อกับกระบอกสูบ การประดิษฐ์ตัวเก็บประจุเป็นการค้นพบที่สำคัญที่สุดของ Watt ในช่วงแรกของการทำงาน วัตต์ได้รับสิทธิบัตรสำหรับการประดิษฐ์นี้ในปี พ.ศ. 2312 ในการยื่นคำขอรับสิทธิบัตร เขากำหนดให้สิ่งประดิษฐ์ของเขาเป็น "วิธีการใหม่ในการลดการใช้ไอน้ำ และด้วยเหตุนี้ เชื้อเพลิงในรถดับเพลิง"
เครื่องยนต์ไอน้ำอเนกประสงค์ที่เหมาะสำหรับการใช้งานจริงถูกคิดค้นโดยวิศวกรความร้อนชาวอังกฤษ James Watt (1736-1819) วัตต์เริ่มทำงานกับเครื่องยนต์ไอน้ำในปี พ.ศ. 2307 เมื่อเขาได้รับมอบหมายให้แก้ไขแบบจำลองเครื่องยนต์ไอน้ำบรรยากาศของนิวโคเมน เขาดึงความสนใจไปที่การใช้ไอน้ำที่ไม่ก่อผลในปริมาณมาก และด้วยเหตุนี้ เชื้อเพลิงในรถ จากการตรวจสอบสาเหตุของปรากฏการณ์นี้ Watt ได้ข้อสรุปว่าการทำงานที่ดีของเครื่องจักรบรรยากาศขึ้นอยู่กับการปฏิบัติตามเงื่อนไขสองประการ: ประการแรกเพื่อให้ได้สุญญากาศที่แข็งแกร่งภายใต้ลูกสูบจำเป็นต้องกลั่นตัวไอน้ำใน กระบอกสูบให้สมบูรณ์ที่สุดเท่าที่จะเป็นไปได้และเพื่อให้กระบอกสูบเย็นลงมากที่สุด ประการที่สอง เพื่อหลีกเลี่ยงการสูญเสียไอน้ำที่ไม่ก่อผล จำเป็นต้องปล่อยให้ลูกสูบเคลื่อนจากหม้อไอน้ำไปยังกระบอกสูบร้อนที่ไม่มีการระบายความร้อน ในตอนแรกดูเหมือนเป็นไปไม่ได้ในทางเทคนิคที่จะปฏิบัติตามเงื่อนไขทั้งสองนี้ในเวลาเดียวกัน หลังจากการศึกษาและการทดลองในเชิงลึกเป็นชุด ในที่สุด Watt ก็สามารถแก้ไขปัญหาทางเทคนิคที่ซับซ้อนนี้ได้ เขาเสนอให้กลั่นไอน้ำในถังคอนเดนเซอร์แยกต่างหากที่เชื่อมต่อกับกระบอกสูบ การประดิษฐ์ตัวเก็บประจุเป็นการค้นพบที่สำคัญที่สุดของ Watt ในช่วงแรกของการทำงาน วัตต์ได้รับสิทธิบัตรสำหรับการประดิษฐ์นี้ในปี พ.ศ. 2312 ในการยื่นคำขอรับสิทธิบัตร เขากำหนดให้สิ่งประดิษฐ์ของเขาเป็น "วิธีการใหม่ในการลดการใช้ไอน้ำ และด้วยเหตุนี้ เชื้อเพลิงในรถดับเพลิง"
ผลงานชิ้นแรกของเจมส์ วัตต์
ดังนั้นจึงพบแนวคิดที่ถูกต้องในการปรับปรุงเครื่องจักรไอน้ำ แต่จำเป็นต้องดำเนินการตามแนวคิดนี้ในทางปฏิบัติ ด้วยเหตุนี้ วัตต์จึงต้องใช้เวลาหลายปีในการทำงานหนักและต่อสู้กับอุปสรรคและความยากลำบากมากมายไม่รู้จบ การผลิตเครื่องจักรขนาดใหญ่ต้องใช้เงินเป็นจำนวนมาก และเงินทุนของวัตต์เองก็ไม่มีนัยสำคัญโดยสิ้นเชิง ฉันต้องหันไปพึ่งผู้ผลิตและนักอุตสาหกรรมด้วยการร้องขอเงินทุนเพื่อสร้างเครื่องจักรใหม่ที่น่าอับอาย ที่  ในการค้นหาเงินทุนเพื่อสร้างเครื่องยนต์ของเขา วัตต์เริ่มฝันถึงงานที่ทำกำไรได้นอกประเทศอังกฤษ ในช่วงต้นทศวรรษ 70 เขาบอกเพื่อน ๆ ว่า "เขาเบื่อบ้านเกิด" และเริ่มพูดอย่างจริงจังเกี่ยวกับการย้ายไปรัสเซีย รัฐบาลรัสเซียเสนอให้วิศวกรชาวอังกฤษ "ประกอบอาชีพตามรสนิยมและความรู้ของเขา" โดยได้รับเงินเดือน 1,000 ปอนด์สเตอร์ลิงต่อปี การจากไปของวัตท์ไปยังรัสเซียถูกขัดขวางโดยสัญญาที่เขาทำไว้ในปี ค.ศ. 1772 กับนายทุนโบลตัน ซึ่งเป็นเจ้าของกิจการสร้างเครื่องจักรในเมืองโซโห ใกล้กับเบอร์มิงแฮม โบลตันรู้มานานแล้วเกี่ยวกับการประดิษฐ์เครื่องจักรที่ "ลุกเป็นไฟ" ใหม่ แต่ลังเลที่จะอุดหนุนการก่อสร้าง โดยสงสัยในคุณค่าที่ใช้งานได้จริงของเครื่องจักร เขารีบสรุปข้อตกลงกับวัตต์ก็ต่อเมื่อมีภัยคุกคามที่แท้จริงของนักประดิษฐ์ที่จะเดินทางไปรัสเซีย ข้อตกลงที่เชื่อมโยงวัตต์กับโบลตันกลับกลายเป็นว่ามีประสิทธิภาพมาก โบลตันได้รับการพิสูจน์แล้วว่าเป็นคนฉลาดและมองการณ์ไกล เขาไม่ได้จำกัดค่าใช้จ่ายในการสร้างเครื่องจักร โบลตันตระหนักว่าอัจฉริยะของวัตต์ซึ่งเป็นอิสระจากความกังวลเล็กๆ น้อยๆ ที่เหน็ดเหนื่อยกับขนมปังชิ้นหนึ่ง จะเผยให้เห็นเต็มกำลังและเสริมสร้างนายทุนที่กล้าได้กล้าเสีย นอกจากนี้ โบลตันเองก็เป็นวิศวกรเครื่องกลรายใหญ่ และแนวคิดทางเทคนิคของวัตต์ก็ทำให้เขาหลงใหล โรงงานในโซโหมีชื่อเสียงในด้านอุปกรณ์ชั้นหนึ่งในขณะนั้น มีพนักงานที่มีทักษะ ดังนั้น วัตต์จึงยอมรับข้อเสนอของโบลตันอย่างกระตือรือร้นในการจัดตั้งการผลิตเครื่องยนต์ไอน้ำที่โรงงาน การออกแบบใหม่. ตั้งแต่ต้นทศวรรษ 70 จนถึงสิ้นชีวิต Watt ยังคงเป็นหัวหน้าช่างของโรงงาน ที่โรงงานโซโห เมื่อปลายปี พ.ศ. 2317 ได้มีการสร้างเครื่องจักรแบบ double-acting เครื่องแรกขึ้น
ในการค้นหาเงินทุนเพื่อสร้างเครื่องยนต์ของเขา วัตต์เริ่มฝันถึงงานที่ทำกำไรได้นอกประเทศอังกฤษ ในช่วงต้นทศวรรษ 70 เขาบอกเพื่อน ๆ ว่า "เขาเบื่อบ้านเกิด" และเริ่มพูดอย่างจริงจังเกี่ยวกับการย้ายไปรัสเซีย รัฐบาลรัสเซียเสนอให้วิศวกรชาวอังกฤษ "ประกอบอาชีพตามรสนิยมและความรู้ของเขา" โดยได้รับเงินเดือน 1,000 ปอนด์สเตอร์ลิงต่อปี การจากไปของวัตท์ไปยังรัสเซียถูกขัดขวางโดยสัญญาที่เขาทำไว้ในปี ค.ศ. 1772 กับนายทุนโบลตัน ซึ่งเป็นเจ้าของกิจการสร้างเครื่องจักรในเมืองโซโห ใกล้กับเบอร์มิงแฮม โบลตันรู้มานานแล้วเกี่ยวกับการประดิษฐ์เครื่องจักรที่ "ลุกเป็นไฟ" ใหม่ แต่ลังเลที่จะอุดหนุนการก่อสร้าง โดยสงสัยในคุณค่าที่ใช้งานได้จริงของเครื่องจักร เขารีบสรุปข้อตกลงกับวัตต์ก็ต่อเมื่อมีภัยคุกคามที่แท้จริงของนักประดิษฐ์ที่จะเดินทางไปรัสเซีย ข้อตกลงที่เชื่อมโยงวัตต์กับโบลตันกลับกลายเป็นว่ามีประสิทธิภาพมาก โบลตันได้รับการพิสูจน์แล้วว่าเป็นคนฉลาดและมองการณ์ไกล เขาไม่ได้จำกัดค่าใช้จ่ายในการสร้างเครื่องจักร โบลตันตระหนักว่าอัจฉริยะของวัตต์ซึ่งเป็นอิสระจากความกังวลเล็กๆ น้อยๆ ที่เหน็ดเหนื่อยกับขนมปังชิ้นหนึ่ง จะเผยให้เห็นเต็มกำลังและเสริมสร้างนายทุนที่กล้าได้กล้าเสีย นอกจากนี้ โบลตันเองก็เป็นวิศวกรเครื่องกลรายใหญ่ และแนวคิดทางเทคนิคของวัตต์ก็ทำให้เขาหลงใหล โรงงานในโซโหมีชื่อเสียงในด้านอุปกรณ์ชั้นหนึ่งในขณะนั้น มีพนักงานที่มีทักษะ ดังนั้น วัตต์จึงยอมรับข้อเสนอของโบลตันอย่างกระตือรือร้นในการจัดตั้งการผลิตเครื่องยนต์ไอน้ำที่โรงงาน การออกแบบใหม่. ตั้งแต่ต้นทศวรรษ 70 จนถึงสิ้นชีวิต Watt ยังคงเป็นหัวหน้าช่างของโรงงาน ที่โรงงานโซโห เมื่อปลายปี พ.ศ. 2317 ได้มีการสร้างเครื่องจักรแบบ double-acting เครื่องแรกขึ้น
ผลงานชิ้นที่สองของเจมส์ วัตต์
วัตต์ไม่พอใจเครื่องยนต์ไอน้ำเครื่องแรกของเขาและเริ่มทำงานเพื่อปรับปรุงในทันที ในปี พ.ศ. 2320 วัตต์เพื่อเพิ่มประสิทธิภาพของเครื่องจักรต่อไปได้เสนอการใช้การตัดและการขยายไอน้ำ เครื่องจักรของ Watt ที่ออกแบบดั้งเดิมช่วยลดต้นทุนในการรับพลังงานกลได้อย่างมาก ส่วนใหญ่สำหรับความต้องการของอุตสาหกรรมเหมืองแร่ เธอค้นพบประโยชน์สำหรับตัวเองอย่างรวดเร็วในเหมืองและเหมือง โดยแทนที่เครื่อง Newcomen โดยสิ้นเชิง การเปิดตัวเครื่องยนต์ไอน้ำใหม่ช่วยลดการใช้ถ่านหินได้สามในสี่ เจ้าของอักษรรูนทองแดงในคอร์นวอลลิสแสดงความสนใจอย่างมากเป็นพิเศษในเครื่องจักรของวัตต์ โรงงานโซโหผลิตเครื่องจักรไอน้ำ 40 เครื่องในปี 1780 ซึ่งครึ่งหนึ่งถูกกำหนดให้เป็นเหมืองที่ Cornwall Fox อย่างไรก็ตาม เช่นเดียวกับเครื่องกำเนิดไอน้ำบรรยากาศที่เคยประดิษฐ์ขึ้นก่อนหน้านี้ เครื่องอบไอน้ำแบบ double-acting ไม่เหมาะกับบทบาทของเครื่องยนต์อเนกประสงค์ แต่ใช้ได้กับการยกน้ำจากเหมืองเท่านั้น สามารถใช้เครื่องนี้กับปั๊มน้ำในเมืองต่างๆ ได้เช่นเดียวกับการขับโบลเวอร์ เนื่องจากในกรณีนี้ การเคลื่อนที่ของส่วนการทำงานของเครื่องจะเป็นเส้นตรง-การสั่น สำหรับการใช้งานในสถานประกอบการอุตสาหกรรม จำเป็นต้องมีเพลาที่มีล้อติดตั้งอยู่ หมุนอย่างต่อเนื่อง ซึ่งสามารถถ่ายโอนงานไปยังเครื่องมือกลโดยใช้สายพานขับเคลื่อน ความต้องการเครื่องยนต์เอนกประสงค์มีมากขึ้นเรื่อยๆ ในอุตสาหกรรมของอังกฤษ จดหมายมาถึงโรงงานโซโหจากผู้ประกอบการในอุตสาหกรรมต่างๆ เพื่อขอเครื่องจักรไอน้ำของระบบใหม่ ซึ่งไม่เพียงแต่ออกแบบมาเพื่อสูบน้ำเท่านั้น แต่ยังต้องติดตั้งเครื่องมือเครื่องจักรแบบเคลื่อนที่ในเวิร์กช็อปด้วย ตั้งแต่ปี พ.ศ. 2321 วัตต์เริ่มทำงานเกี่ยวกับการประดิษฐ์เครื่องจักรที่มีการเคลื่อนที่แบบหมุนอย่างต่อเนื่อง เป็นผลให้มีการสร้างเครื่องจักรที่ทำหน้าที่สองครั้งซึ่งเป็นเครื่องยนต์ความร้อนสากล เขาได้รับสิทธิบัตรสำหรับเครื่องนี้ในปี พ.ศ. 2327 พี 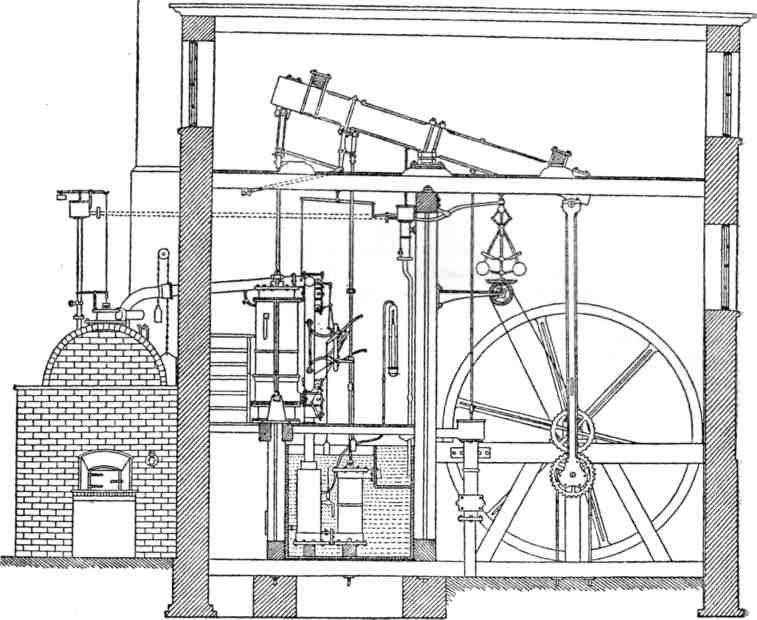
หลักการทำงานของเครื่องคือไอน้ำจากหม้อไอน้ำไหลผ่านหลอดเข้าไปในกระบอกสูบ แกนม้วนเก็บไอน้ำจะปล่อยไอน้ำจากด้านหนึ่งของลูกสูบ จากนั้นจากอีกด้านหนึ่ง จึงสร้างแรงดันที่จำเป็นต่อลูกสูบ ดังนั้นองค์ประกอบหลักของเครื่องยนต์ไอน้ำสากลจึงค่อย ๆ พัฒนาขึ้น นวัตกรรมที่สำคัญที่สุดที่วัตต์ผลิตขึ้นสำหรับเครื่อง Double-acting มีดังนี้:
- ตรงกันข้ามกับเครื่องจักรไอน้ำบรรยากาศเครื่องแรกในปี พ.ศ. 2312 เครื่องที่ได้รับสิทธิบัตรในปี พ.ศ. 2327 ใช้หลักการดับเบิ้ลแอ็กชัน กล่าวคือ ไอน้ำทำหน้าที่สลับกันที่ด้านหนึ่งของลูกสูบแล้วอีกด้านหนึ่ง เพื่อส่งไอน้ำไปยังโพรงต่างๆ ของกระบอกสูบ เขาจึงใช้อุปกรณ์พิเศษ - แกนม้วนตัว สำหรับการจัดตำแหน่ง การเคลื่อนที่แบบหมุนวัตต์ใช้มู่เล่ ในการแปลงการเคลื่อนที่โยกของลูกสูบให้เป็นแบบต่อเนื่องในเครื่องปรับสมดุล วัตต์ได้คิดค้นกลไกพิเศษที่ช่วยให้แน่ใจในความตรงของการเคลื่อนที่ของก้านลูกสูบที่เชื่อมต่อกับปลายด้านหนึ่งของบาลานซ์บาลานซ์ (ที่เรียกว่ารูปสี่เหลี่ยมด้านขนานของวัตต์) รวมถึงวิธีการแปลงการเคลื่อนที่แบบเส้นตรงเป็นการเคลื่อนที่แบบหมุนได้หลายวิธี
มอเตอร์ไฟฟ้า
อี  เครื่องจักรไฟฟ้าใช้กันอย่างแพร่หลายในโรงไฟฟ้า ในอุตสาหกรรม การขนส่ง การบิน ในระบบควบคุมและควบคุมอัตโนมัติ และในชีวิตประจำวัน
เครื่องจักรไฟฟ้าใช้กันอย่างแพร่หลายในโรงไฟฟ้า ในอุตสาหกรรม การขนส่ง การบิน ในระบบควบคุมและควบคุมอัตโนมัติ และในชีวิตประจำวัน
เครื่องจักรไฟฟ้าแปลงพลังงานกลเป็นพลังงานไฟฟ้าและในทางกลับกัน เครื่องที่แปลงพลังงานกลเป็นพลังงานไฟฟ้าเรียกว่าเครื่องกำเนิดไฟฟ้า การแปลงพลังงานไฟฟ้าเป็นพลังงานกลดำเนินการโดยมอเตอร์ เครื่องจักรไฟฟ้าใด ๆ สามารถใช้เป็นเครื่องกำเนิดไฟฟ้าและเป็นมอเตอร์ไฟฟ้า คุณสมบัติของเครื่องจักรไฟฟ้าในการเปลี่ยนทิศทางของพลังงานที่แปลงนี้เรียกว่าการย้อนกลับของเครื่อง เครื่องจักรไฟฟ้ายังสามารถใช้เพื่อแปลงพลังงานไฟฟ้าของกระแสไฟฟ้าชนิดหนึ่ง (ความถี่ จำนวนเฟสของกระแสสลับ แรงดันไฟกระแสตรง) เป็นพลังงานของกระแสไฟฟ้าประเภทอื่น เครื่องจักรไฟฟ้าดังกล่าวเรียกว่าคอนเวอร์เตอร์ ขึ้นอยู่กับชนิดของกระแสไฟของการติดตั้งไฟฟ้าที่เครื่องจักรต้องทำงาน โดยจะแบ่งออกเป็นเครื่องไฟฟ้ากระแสตรงและไฟฟ้ากระแสสลับ เครื่อง AC สามารถเป็นเฟสเดียวหรือหลายเฟส
ที่ใช้กันอย่างแพร่หลายคือเครื่องซิงโครนัสและอะซิงโครนัสสามเฟสรวมทั้งเครื่องสายสวนกระแสสลับซึ่งช่วยให้สามารถควบคุมความเร็วได้อย่างประหยัดในช่วงกว้าง ในปัจจุบัน มอเตอร์แบบอะซิงโครนัสเป็นเครื่องจักรไฟฟ้าที่ใช้กันทั่วไปมากที่สุด พวกเขาใช้ไฟฟ้าประมาณ 50% ที่ผลิตโดยโรงไฟฟ้าของประเทศ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีการใช้กันอย่างแพร่หลายเนื่องจากความเรียบง่ายในการออกแบบ ต้นทุนต่ำ และความน่าเชื่อถือในการทำงานสูง มีประสิทธิภาพค่อนข้างสูง: ที่กำลังไฟมากกว่า 1 กิโลวัตต์ ประสิทธิภาพ = 0.7:0.95 และเฉพาะในไมโครมอเตอร์เท่านั้นที่จะลดลงเหลือ 0.2-0.65 ตอนนี้ฉันจะบอกเกี่ยวกับมอเตอร์ไร้แปรงถ่านใหม่
มอเตอร์วาล์ว (VD)
มอเตอร์ไฟฟ้าแบบวาล์วเป็นมอเตอร์ซิงโครนัสตามหลักการของการควบคุมความถี่ด้วยการซิงโครไนซ์ด้วยตนเอง สาระสำคัญคือการควบคุมเวกเตอร์สนามแม่เหล็กสเตเตอร์ขึ้นอยู่กับตำแหน่งของโรเตอร์ มอเตอร์วาล์ว (BLDC หรือ PMSM ในวรรณคดีอังกฤษ) เรียกอีกอย่างว่ามอเตอร์กระแสตรงแบบไม่มีแปรงเนื่องจากตัวควบคุมของมอเตอร์ดังกล่าวมักจะขับเคลื่อนโดย แรงดันคงที่.
สเตเตอร์.
สเตเตอร์มีการออกแบบแบบดั้งเดิมและคล้ายกับสเตเตอร์ของเครื่องเหนี่ยวนำ ประกอบด้วยลำตัว แกนทำจากเหล็กไฟฟ้า และขดลวดทองแดงวางเป็นร่องตามแนวเส้นรอบวงของแกน จำนวนขดลวดกำหนดจำนวนเฟสของมอเตอร์ สำหรับการเริ่มต้นและการหมุนตัวเอง สองขั้นตอนก็เพียงพอแล้ว - ไซน์และโคไซน์ โดยปกติ VD สามเฟส น้อยกว่าสี่เฟส ตามวิธีการวางรอบในขดลวดสเตเตอร์ มอเตอร์ที่มีแรงเคลื่อนไฟฟ้าย้อนกลับของรูปทรงสี่เหลี่ยมคางหมู (BLDC) และรูปแบบไซน์ (PMSM) จะแตกต่างกัน ตามวิธีการจ่ายกระแสไฟเฟสในมอเตอร์ประเภทที่สอดคล้องกันก็เปลี่ยนรูปสี่เหลี่ยมคางหมูหรือไซน์โรเตอร์
โรเตอร์ทำโดยใช้แม่เหล็กถาวรและมักจะมีเสาสองถึงแปดคู่โดยสลับขั้วเหนือและใต้ ในตอนแรกแม่เหล็กเฟอร์ไรต์ถูกใช้เพื่อสร้างโรเตอร์ เป็นของธรรมดาและราคาถูก แต่มีข้อเสียคือ ระดับต่ำการเหนี่ยวนำแม่เหล็ก แม่เหล็กที่ทำจากโลหะผสมที่หายากกำลังได้รับความนิยมเนื่องจากช่วยให้คุณได้รับ ระดับสูงการเหนี่ยวนำแม่เหล็กและลดขนาดของโรเตอร์ ในมอเตอร์กำลังสูง จะใช้แม่เหล็กไฟฟ้าแทนแม่เหล็กถาวรบนโรเตอร์ แรงดันไฟจ่ายผ่านแปรงและแหวนสลิปที่ติดตั้งบนโรเตอร์ นี่คือการทำงานของเครื่องกำเนิดไฟฟ้ารถยนต์หลักการทำงานของ VD
หลักการทำงานของ HP ขึ้นอยู่กับข้อเท็จจริงที่ว่าตัวควบคุม HP สลับขดลวดสเตเตอร์ในลักษณะที่เวกเตอร์สนามแม่เหล็กสเตเตอร์จะเลื่อนเสมอโดยมุมที่ใกล้เคียงกับ 90° หรือ -90° สัมพันธ์กับสนามแม่เหล็กของโรเตอร์ เวกเตอร์ การใช้การปรับ PWM ตัวควบคุมจะควบคุมกระแสที่ไหลผ่านขดลวดของ HP ดังนั้นขนาดของเวกเตอร์สนามแม่เหล็กสเตเตอร์จึงควบคุมแรงบิดที่กระทำกับโรเตอร์ของ HP เครื่องหมายของมุมระหว่างเวกเตอร์กำหนดทิศทางของโมเมนต์ที่กระทำต่อโรเตอร์ องศาไฟฟ้า มีจำนวนคู่ขั้วของโรเตอร์น้อยกว่าองศาเรขาคณิต ตัวอย่างเช่น ใน HP ที่มีโรเตอร์ที่มีขั้ว 3 คู่ มุมที่เหมาะสมที่สุดระหว่างเวกเตอร์จะเป็น 90° / 3 = 30° เนื่องจากขดลวดมีเพียง 6 เฟส สเตเตอร์เวกเตอร์สามารถเคลื่อนที่ในการกระโดดได้ 60 ° - ซึ่งหมายความว่ามุมจริงระหว่างเวกเตอร์จะไม่เท่ากับ 90 ° a จะเปลี่ยนจาก 60° เป็น 120° เมื่อโรเตอร์ HP หมุน การสลับจะดำเนินการในลักษณะที่กระแสกระตุ้นของโรเตอร์คือ F 0 มีค่าคงที่สัมพันธ์กับการไหลของสมอ อันเป็นผลมาจากปฏิสัมพันธ์ของการไหลของเกราะและการกระตุ้นทำให้เกิดแรงบิด เอ็มซึ่งพยายามหมุนโรเตอร์เพื่อให้อาร์เมเจอร์และแรงกระตุ้นไหลพร้อมกัน แต่เมื่อโรเตอร์หมุนภายใต้การกระทำของ DPR สวิตช์ขดลวดและการไหลของอาร์เมเจอร์จะเปลี่ยนไปยังขั้นตอนต่อไป ในกรณีนี้ เวกเตอร์กระแสที่ได้จะถูกเลื่อนและหยุดนิ่งโดยสัมพันธ์กับฟลักซ์ของโรเตอร์ ซึ่งจะสร้างชั่วขณะบนเพลามอเตอร์ ในโหมดการทำงานของมอเตอร์ MMF ของสเตเตอร์จะอยู่ข้างหน้าโรเตอร์ MMF โดยทำมุม 90° ซึ่งคงไว้ด้วยความช่วยเหลือของ DPR ในโหมดเบรก MMF ของสเตเตอร์จะอยู่ด้านหลังโรเตอร์ MMF และยังคงรักษามุม 90° โดยใช้ DPRข้อดีและข้อเสียของ VD
ในช่วงไม่กี่ครั้งนี้ เครื่องยนต์ประเภทนี้กำลังได้รับความนิยมอย่างรวดเร็ว เจาะเข้าไปในหลายอุตสาหกรรม พบการใช้งานในด้านต่าง ๆ ของการใช้งาน: from เครื่องใช้ในครัวเรือนเพื่อการขนส่งทางรถไฟ HP ที่มีระบบควบคุมอิเล็กทรอนิกส์มักจะรวมคุณสมบัติที่ดีที่สุดของมอเตอร์แบบไม่สัมผัสและมอเตอร์กระแสตรงเข้าด้วยกัน ข้อดี:- ความเร็วและไดนามิกสูง ความแม่นยำของตำแหน่ง ช่วงความเร็วกว้าง ไม่สัมผัสและไม่มีส่วนประกอบที่ต้องบำรุงรักษา - เครื่องจักรไร้แปรงถ่าน สามารถใช้ได้ในสภาพแวดล้อมที่ระเบิดและรุนแรง ความจุเกินพิกัดของแรงบิดสูง ประสิทธิภาพพลังงานสูง (ประสิทธิภาพมากกว่า 90% และ cosφมากกว่า 0.95) อายุการใช้งานยาวนาน ความน่าเชื่อถือสูง และอายุการใช้งานที่เพิ่มขึ้นเนื่องจากไม่มีการเลื่อนหน้าสัมผัสทางไฟฟ้า มอเตอร์ไฟฟ้าร้อนต่ำเมื่อทำงานในโหมดที่มีการโอเวอร์โหลดได้
- ระบบควบคุมมอเตอร์ที่ค่อนข้างซับซ้อน ต้นทุนมอเตอร์สูงเนื่องจากการใช้แม่เหล็กถาวรราคาแพงในการออกแบบโรเตอร์
เครื่องยนต์สันดาปภายใน.
ประวัติความเป็นมาของการสร้าง
นักวิทยาศาสตร์ วิศวกร ผู้ทดสอบหลายคนทำงานและทำงานต่อไปเพื่อปรับปรุงเครื่องยนต์สันดาปภายใน และแม้ว่ากำลัง ประสิทธิภาพ และคุณลักษณะอื่นๆ ของเครื่องยนต์จะได้รับการปรับปรุงอย่างต่อเนื่อง แต่หลักการทำงานพื้นฐานยังคงเหมือนเดิม พวกเขาสร้างเครื่องยนต์สันดาปภายในขึ้นในช่วงกลางของศตวรรษที่ 19 เมื่อเครื่องจักรไอน้ำครองตำแหน่งสูงสุดในการขนส่ง ในขณะนั้นมีการใช้แก๊สส่องสว่างเพื่อส่องสว่างถนนในเมือง คุณสมบัติของเชื้อเพลิงชนิดใหม่ทำให้นักประดิษฐ์คิดว่าไม่ใช่ไอน้ำ แต่เป็นส่วนผสมของก๊าซที่สามารถเคลื่อนลูกสูบในกระบอกสูบได้ ความสำเร็จทางเทคนิคอีกประการหนึ่งช่วยตอบคำถามเกี่ยวกับวิธีการจุดชนวนของส่วนผสมนี้ นั่นคือขดลวดเหนี่ยวนำเพื่อผลิตประกายไฟ ความสำเร็จครั้งแรกในการสร้างเครื่องยนต์สันดาปภายในเป็นของ บริษัท เบนซ์และเดมเลอร์ หลายปีที่ผ่านมา เบนซ์และเดมเลอร์ต้องปรับปรุงเครื่องยนต์ ด้วยการสนับสนุนจากเศรษฐี คาร์ล เบนซ์จึงได้สร้างโรงงานขนาดเล็กสำหรับผลิตเครื่องยนต์ที่ใช้แก๊ส ในการค้นหาเชื้อเพลิงเครื่องยนต์ที่มีประสิทธิภาพมากกว่าแก๊สให้แสงสว่าง Gottlieb Daimler ได้เดินทางไปทางใต้ของรัสเซียในปี 1881 ซึ่งเขาได้ทำความคุ้นเคยกับกระบวนการกลั่นน้ำมัน หนึ่งในผลิตภัณฑ์ของบริษัท นั่นคือ น้ำมันเบนซินชนิดเบา กลายเป็นเพียงแหล่งพลังงานที่นักประดิษฐ์กำลังมองหา นั่นคือ น้ำมันเบนซินระเหยได้ดี เผาไหม้อย่างรวดเร็วและสมบูรณ์ และสะดวกต่อการขนส่ง ในปี พ.ศ. 2426 เดมเลอร์เสนอการออกแบบเครื่องยนต์ที่สามารถใช้ได้ทั้งน้ำมันและน้ำมันเบนซิน เครื่องยนต์ของรถยนต์เดมเลอร์รุ่นต่อมาทั้งหมดได้รับการออกแบบสำหรับเชื้อเพลิงเหลวเท่านั้น การเปลี่ยนจากแก๊สเป็นน้ำมันเบนซินทำให้สามารถเพิ่มจำนวนรอบการหมุนของเพลาข้อเหวี่ยงได้หลายครั้ง ทำให้เป็น 900 รอบต่อนาที กำลังจำเพาะของเครื่องยนต์เพิ่มขึ้นเกือบสองเท่า (เช่น ต่อ 1 ลิตรของการทำงานทั้งหมด - ปริมาตรของกระบอกสูบ) งานของผู้บุกเบิกมักต้องการความกระตือรือร้นและความกล้าหาญ รางวัลสำหรับความพากเพียรของพวกเขาคือความกตัญญูของลูกหลานของพวกเขา มอเตอร์ไซค์พ่วงข้างที่ขับเคลื่อนด้วยตัวเองคันแรกของเบนซ์ที่มีเครื่องยนต์เบนซินคือรถสามล้อ เดมเลอร์เริ่มต้นด้วย "มอเตอร์ไซค์" สองล้อ สิ่งประดิษฐ์ของเดมเลอร์และเบนซ์ได้รับการต้อนรับอย่างเย็นชาจากเพื่อนร่วมชาติ เสียงกระทบกันของเครื่องยนต์เบนซินรบกวนชาวเมืองที่ดี “ผู้เชี่ยวชาญ” ยังอ้างว่าเครื่องยนต์ของ “รถม้าไร้ม้า” จะระเบิดแน่นอน “ตำรวจต้องไม่อนุญาตให้เกวียนเติมน้ำมันทำอันตรายคนทั้งโลก” หนังสือพิมพ์เยอรมันเขียน เป็นผลให้เดมเลอร์ต้องทดสอบรถของเขาในเวลากลางคืนบนถนนในชนบท และตำรวจขอให้เบนซ์รายงานเส้นทางและสถานที่หยุดรถก่อนการเดินทางแต่ละครั้งเพื่อแจ้งเตือนหน่วยดับเพลิง เพื่อแสดงความปลอดภัยในการเดินทางโดยรถยนต์ Frau Bertha Benz ที่แอบจากสามีของเธอทำระยะทางรถยนต์ (180 กม.) กับลูกชายของเธอ ในการเดินทางครั้งนี้ ผู้ขับขี่ที่กล้าหาญต้องทำความสะอาดท่อจ่ายน้ำมันเชื้อเพลิงด้วยเข็มหมุดและหุ้มสายไฟด้วยสายรัดถุงเท้ายาง แม้จะมีข้อได้เปรียบที่ชัดเจนของเครื่องยนต์สันดาปภายในจนถึงสิ้นศตวรรษที่ XIX รถยนต์ไอน้ำและไฟฟ้าถือว่ามีแนวโน้มมากกว่าก๊าซและน้ำมันเบนซิน ตัวอย่างเช่น ในสหรัฐอเมริกา ของลูกเรือจักรกลที่ผลิตในปี 1899 40% เป็น "รถไอน้ำ" 38% เป็น "รถยนต์ไฟฟ้า" และเพียง 22% เท่านั้นที่เป็น "รถยนต์เบนซิน" ภายในปี 1905 สถานการณ์เปลี่ยนไป: รถยนต์ที่มีเครื่องยนต์สันดาปภายในกลายเป็น 70% และส่วนแบ่งของเครื่องยนต์ไฟฟ้าและไอน้ำลดลงเหลือ 30% ภายในปี 1920 ทีมงานไอน้ำและไฟฟ้าได้กลายเป็นสิ่งที่หายาก ชม  เพื่อเพิ่มความเร็วของรถ จำเป็นต้องเพิ่มกำลังของเครื่องยนต์ สิ่งนี้พิสูจน์แล้วว่าทำได้ยาก ด้วยการเพิ่มขนาดเส้นผ่าศูนย์กลางของลูกสูบหรือความยาวของจังหวะ มวลของเครื่องยนต์ก็เพิ่มขึ้นอย่างมาก นักออกแบบใช้เส้นทางที่แตกต่าง: พวกเขาเริ่มใช้กระบอกสูบหลายอันแทนที่จะเป็นอันเดียว ในปี พ.ศ. 2434 เดมเลอร์ได้สร้างเครื่องยนต์สี่สูบเครื่องแรก
เพื่อเพิ่มความเร็วของรถ จำเป็นต้องเพิ่มกำลังของเครื่องยนต์ สิ่งนี้พิสูจน์แล้วว่าทำได้ยาก ด้วยการเพิ่มขนาดเส้นผ่าศูนย์กลางของลูกสูบหรือความยาวของจังหวะ มวลของเครื่องยนต์ก็เพิ่มขึ้นอย่างมาก นักออกแบบใช้เส้นทางที่แตกต่าง: พวกเขาเริ่มใช้กระบอกสูบหลายอันแทนที่จะเป็นอันเดียว ในปี พ.ศ. 2434 เดมเลอร์ได้สร้างเครื่องยนต์สี่สูบเครื่องแรก
แผนผังการทำงานของเครื่องยนต์สันดาปภายใน
พี 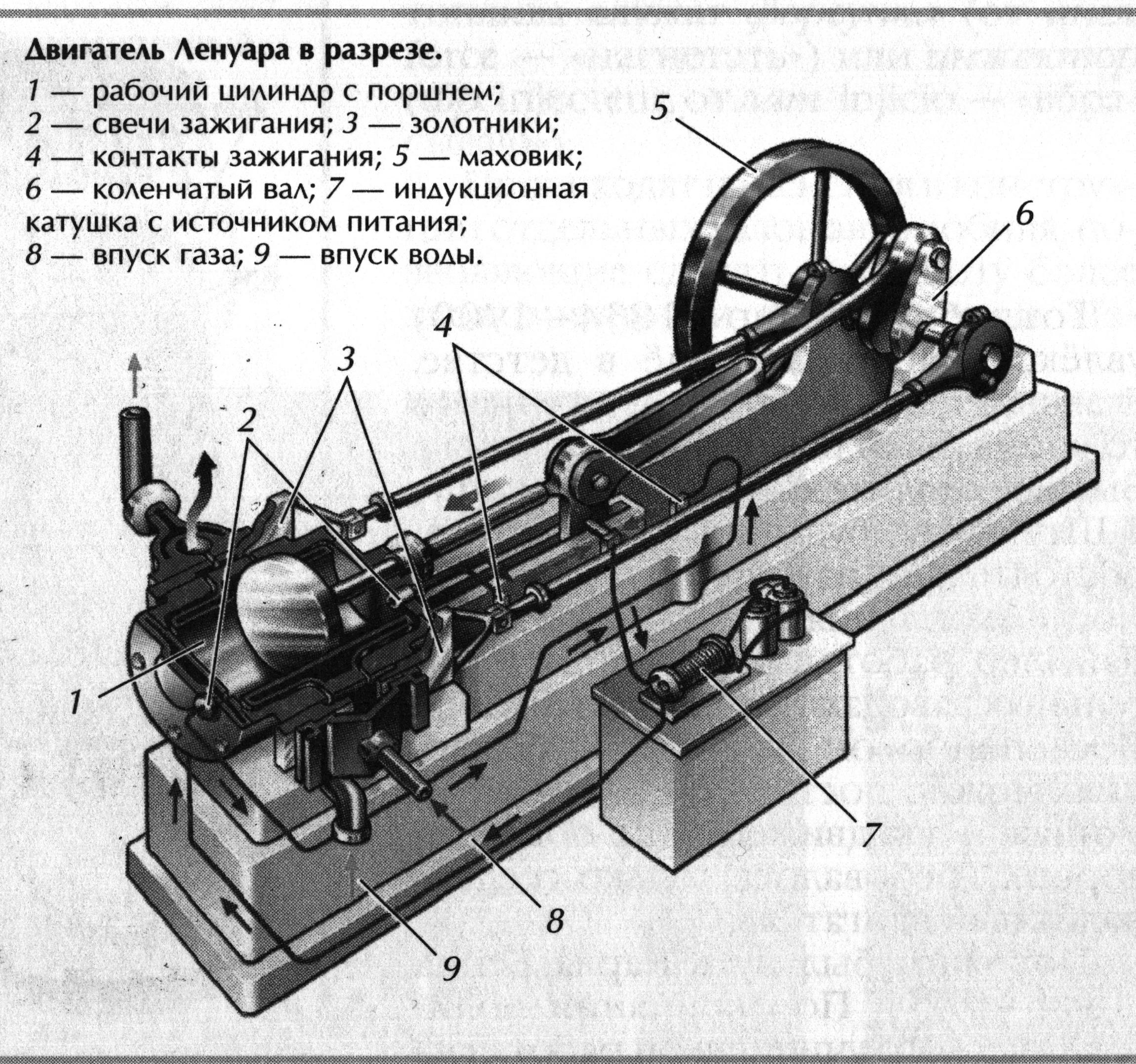 เครื่องยนต์แรกที่ขับเคลื่อนด้วยแก๊สส่องสว่างถูกประดิษฐ์ขึ้นในปี 1860 โดยช่างชาวฝรั่งเศส Etienne Lenoir (1822-1900) เชื้อเพลิงที่ใช้ในเครื่องยนต์เป็นส่วนผสมของก๊าซส่องสว่าง (ก๊าซที่ติดไฟได้ ส่วนใหญ่เป็นมีเทนและไฮโดรเจน) และอากาศ การออกแบบมีคุณสมบัติหลักทั้งหมดของเครื่องยนต์รถยนต์ในอนาคต ได้แก่ หัวเทียนสองหัว กระบอกสูบที่มีลูกสูบแบบ double-acting และรอบการทำงานแบบสองจังหวะ และถึงกระนั้น การออกแบบของ E. Lenoir เป็นเพียงต้นแบบของเครื่องยนต์จริงเท่านั้น ซึ่งจำเป็นต้องมีการปรับปรุงอย่างจริงจัง พอเพียงที่จะบอกว่าประสิทธิภาพของมันคือ 0.04 นั่นคือใช้ความร้อนเพียง 4% ของความร้อนของก๊าซที่ถูกเผา งานที่มีประโยชน์, และส่วนที่เหลืออีก 96% ของก๊าซไอเสีย, ทำให้เคสร้อนขึ้น ฯลฯ เทียนและหลอดไอเสียไม่ทำงานอย่างน่าเชื่อถือ ในการทำให้เครื่องยนต์เย็นลง เราจะจัดหาท่อระบายความร้อนด้วยน้ำแบบคอยล์ให้กับเครื่องยนต์ ต้องใช้น้ำมาก (ประมาณ 120 ลบ.ม. ต่อชั่วโมง) ในปี ค.ศ. 1901 วิศวกรของ Mercedes ได้พัฒนาหม้อน้ำแบบท่อหรือแบบรังผึ้ง ซึ่งกลายมาเป็นส่วนที่คุ้นเคยของด้านหน้ารถ ในปี 1862 วิศวกรชาวฝรั่งเศส Alphonse Beau de Rochas (1815-1891) เสนอแนวคิดของเครื่องยนต์สี่จังหวะ: การบีบอัดล่วงหน้าของส่วนผสมในการทำงานของแก๊สกับอากาศกลายเป็นช่วงเวลาบังคับในการทำงานของหลัง อย่างไรก็ตาม Beau de Rocha ล้มเหลวในการดำเนินการตามความคิดของเขา เครื่องยนต์ดังกล่าวถูกสร้างขึ้นในปี 1876 โดยพนักงานจากโคโลญ (เยอรมนี) Nikolaus August Otto (1832-1891) นักประดิษฐ์ทำงานอย่างหนักในการออกแบบเป็นเวลา 15 ปีและบรรลุประสิทธิภาพที่สูงกว่าเครื่องยนต์ไอน้ำที่มีอยู่ในขณะนั้น
เครื่องยนต์แรกที่ขับเคลื่อนด้วยแก๊สส่องสว่างถูกประดิษฐ์ขึ้นในปี 1860 โดยช่างชาวฝรั่งเศส Etienne Lenoir (1822-1900) เชื้อเพลิงที่ใช้ในเครื่องยนต์เป็นส่วนผสมของก๊าซส่องสว่าง (ก๊าซที่ติดไฟได้ ส่วนใหญ่เป็นมีเทนและไฮโดรเจน) และอากาศ การออกแบบมีคุณสมบัติหลักทั้งหมดของเครื่องยนต์รถยนต์ในอนาคต ได้แก่ หัวเทียนสองหัว กระบอกสูบที่มีลูกสูบแบบ double-acting และรอบการทำงานแบบสองจังหวะ และถึงกระนั้น การออกแบบของ E. Lenoir เป็นเพียงต้นแบบของเครื่องยนต์จริงเท่านั้น ซึ่งจำเป็นต้องมีการปรับปรุงอย่างจริงจัง พอเพียงที่จะบอกว่าประสิทธิภาพของมันคือ 0.04 นั่นคือใช้ความร้อนเพียง 4% ของความร้อนของก๊าซที่ถูกเผา งานที่มีประโยชน์, และส่วนที่เหลืออีก 96% ของก๊าซไอเสีย, ทำให้เคสร้อนขึ้น ฯลฯ เทียนและหลอดไอเสียไม่ทำงานอย่างน่าเชื่อถือ ในการทำให้เครื่องยนต์เย็นลง เราจะจัดหาท่อระบายความร้อนด้วยน้ำแบบคอยล์ให้กับเครื่องยนต์ ต้องใช้น้ำมาก (ประมาณ 120 ลบ.ม. ต่อชั่วโมง) ในปี ค.ศ. 1901 วิศวกรของ Mercedes ได้พัฒนาหม้อน้ำแบบท่อหรือแบบรังผึ้ง ซึ่งกลายมาเป็นส่วนที่คุ้นเคยของด้านหน้ารถ ในปี 1862 วิศวกรชาวฝรั่งเศส Alphonse Beau de Rochas (1815-1891) เสนอแนวคิดของเครื่องยนต์สี่จังหวะ: การบีบอัดล่วงหน้าของส่วนผสมในการทำงานของแก๊สกับอากาศกลายเป็นช่วงเวลาบังคับในการทำงานของหลัง อย่างไรก็ตาม Beau de Rocha ล้มเหลวในการดำเนินการตามความคิดของเขา เครื่องยนต์ดังกล่าวถูกสร้างขึ้นในปี 1876 โดยพนักงานจากโคโลญ (เยอรมนี) Nikolaus August Otto (1832-1891) นักประดิษฐ์ทำงานอย่างหนักในการออกแบบเป็นเวลา 15 ปีและบรรลุประสิทธิภาพที่สูงกว่าเครื่องยนต์ไอน้ำที่มีอยู่ในขณะนั้น 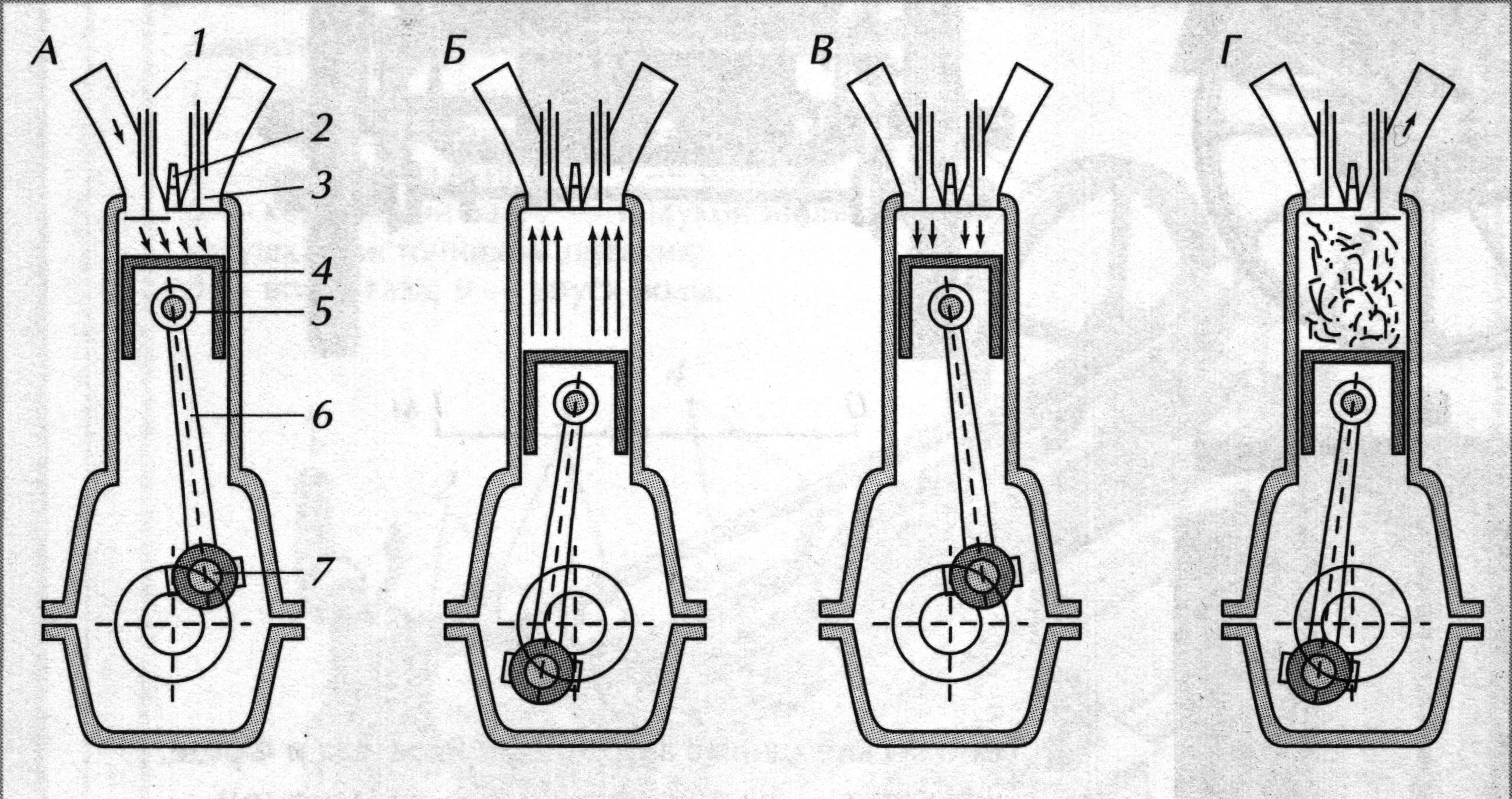 นี่คือวัฏจักรการทำงานของเครื่องยนต์สันดาปภายในสี่จังหวะ: A. การบริโภคของส่วนผสมในการทำงาน ลูกสูบ (4) เลื่อนลง; ผ่านวาล์วทางเข้า (1) ส่วนผสมที่ติดไฟได้เข้าสู่กระบอกสูบ ข. การบีบอัด ลูกสูบ (4) เลื่อนขึ้น; วาล์วทางเข้า (1) และทางออก (3) ปิด; ความดันในกระบอกสูบและอุณหภูมิของสารผสมทำงานเพิ่มขึ้น B. จังหวะการทำงาน (การเผาไหม้และการขยายตัว) อันเป็นผลมาจากการปล่อยประกายไฟของหัวเทียน (2) ส่วนผสมในกระบอกสูบจะถูกเผาไหม้อย่างรวดเร็ว แรงดันแก๊สระหว่างการเผาไหม้จะกระทำต่อลูกสูบ (4); การเคลื่อนที่ของลูกสูบจะถูกส่งผ่านแผ่นลูกสูบ (5) และก้านสูบ (6) ไปยังเพลาข้อเหวี่ยง (7) ทำให้เพลาหมุน ก. การปล่อยก๊าซ. ลูกสูบ (4) เลื่อนขึ้น; วาล์วทางออก (3) เปิดอยู่ ก๊าซไอเสียจากกระบอกสูบเข้าสู่ท่อไอเสียและสู่ชั้นบรรยากาศต่อไป
นี่คือวัฏจักรการทำงานของเครื่องยนต์สันดาปภายในสี่จังหวะ: A. การบริโภคของส่วนผสมในการทำงาน ลูกสูบ (4) เลื่อนลง; ผ่านวาล์วทางเข้า (1) ส่วนผสมที่ติดไฟได้เข้าสู่กระบอกสูบ ข. การบีบอัด ลูกสูบ (4) เลื่อนขึ้น; วาล์วทางเข้า (1) และทางออก (3) ปิด; ความดันในกระบอกสูบและอุณหภูมิของสารผสมทำงานเพิ่มขึ้น B. จังหวะการทำงาน (การเผาไหม้และการขยายตัว) อันเป็นผลมาจากการปล่อยประกายไฟของหัวเทียน (2) ส่วนผสมในกระบอกสูบจะถูกเผาไหม้อย่างรวดเร็ว แรงดันแก๊สระหว่างการเผาไหม้จะกระทำต่อลูกสูบ (4); การเคลื่อนที่ของลูกสูบจะถูกส่งผ่านแผ่นลูกสูบ (5) และก้านสูบ (6) ไปยังเพลาข้อเหวี่ยง (7) ทำให้เพลาหมุน ก. การปล่อยก๊าซ. ลูกสูบ (4) เลื่อนขึ้น; วาล์วทางออก (3) เปิดอยู่ ก๊าซไอเสียจากกระบอกสูบเข้าสู่ท่อไอเสียและสู่ชั้นบรรยากาศต่อไป
เพื่อให้เชื้อเพลิงเหลวเผาไหม้ในเครื่องยนต์ จะต้องทำให้เป็นละอองและผสมกับอากาศ ซึ่งเป็นส่วนผสมที่เรียกว่าการทำงาน ปัญหานี้แก้ไขได้ด้วยคาร์บูเรเตอร์ (จาก เฝอ carburer - "เพื่อเพิ่มคุณค่าให้กับบ้านคาร์บอน") นักประดิษฐ์ไม่พบทันที วิธีที่ดีที่สุดการฉีดพ่น ดังนั้นในหนึ่งในคาร์บูเรเตอร์แรก ๆ น้ำมันเบนซินจึงถูกพ่นด้วยแปรงซึ่งเป็นสาเหตุที่เรียกว่าแปรง แม่นยำ. เบนซ์คาร์บูเรเตอร์ได้ชื่อเดือด (จาก เฝอ barbotage - "การผสม"): อากาศถูกส่งผ่านน้ำมันเบนซินในถังโดยฉีดพ่นเชื้อเพลิง นอกจากนี้ยังมีไส้ตะเกียงคาร์บูเรเตอร์ ออร่า, ซึ่งไม่นานก็ต้องละทิ้งเพราะบางครั้งไส้เทียนก็ถูกดึงเข้าไปในกระบอกสูบ แต่ในปัจจุบัน เพื่อสร้างส่วนผสมที่ใช้งานได้ เชื้อเพลิงมักถูกฉีดภายใต้แรงดัน มันถูกฉีดเข้าไปในท่อไอดี (การฉีดแบบหลายจุด) หรือในท่อทั่วไปที่ด้านหน้าของท่อ ท่อไอดี หรือท่อร่วม (การฉีดแบบจุดเดียว) ), หรือเข้ากระบอกสูบโดยตรง (ฉีดตรง) . ไมโครโปรเซสเซอร์ประสานการทำงานของระบบ ใช้เป็นละอองเชื้อเพลิง หัวฉีด(จากอังกฤษ. แรง - "ปั๊ม") หรือหัวฉีด .
เทอร์โบ
พี  มีการเปลี่ยนแปลงในการออกแบบส่วนประกอบเครื่องยนต์แต่ละชิ้นซึ่งทำให้การทำงานของพวกเขาประหยัดและมีประสิทธิภาพมากขึ้น ตัวอย่างเช่นมีการใช้ระบบเทอร์โบชาร์จเจอร์มากขึ้นหรือในอวกาศ - ชิ - เทอร์โบ ยิ่งออกซิเจนเข้าสู่กระบอกสูบของเครื่องยนต์มากเท่าไร เชื้อเพลิงก็จะยิ่งถูกเผาผลาญมากขึ้นเท่านั้น คุณก็ยิ่งได้รับพลังงานมากขึ้นเท่านั้น อากาศถูกบังคับเข้าสู่กระบอกสูบโดยปั๊มแรงเหวี่ยงซึ่งกินกำลังเครื่องยนต์ส่วนหนึ่ง ไม่รวมค่าใช้จ่ายเหล่านี้ในระบบเทอร์โบชาร์จเจอร์ มันใช้พลังงานของก๊าซไอเสีย C หมุนกังหันก๊าซขนาดเล็กซึ่งปั๊มทำงาน
มีการเปลี่ยนแปลงในการออกแบบส่วนประกอบเครื่องยนต์แต่ละชิ้นซึ่งทำให้การทำงานของพวกเขาประหยัดและมีประสิทธิภาพมากขึ้น ตัวอย่างเช่นมีการใช้ระบบเทอร์โบชาร์จเจอร์มากขึ้นหรือในอวกาศ - ชิ - เทอร์โบ ยิ่งออกซิเจนเข้าสู่กระบอกสูบของเครื่องยนต์มากเท่าไร เชื้อเพลิงก็จะยิ่งถูกเผาผลาญมากขึ้นเท่านั้น คุณก็ยิ่งได้รับพลังงานมากขึ้นเท่านั้น อากาศถูกบังคับเข้าสู่กระบอกสูบโดยปั๊มแรงเหวี่ยงซึ่งกินกำลังเครื่องยนต์ส่วนหนึ่ง ไม่รวมค่าใช้จ่ายเหล่านี้ในระบบเทอร์โบชาร์จเจอร์ มันใช้พลังงานของก๊าซไอเสีย C หมุนกังหันก๊าซขนาดเล็กซึ่งปั๊มทำงาน
การพัฒนาเครื่องยนต์เจ็ท
เครื่องยนต์สันดาปภายในอีกประเภทหนึ่งคือเครื่องยนต์ไอพ่น ตอนนี้ฉันจะบอกเกี่ยวกับพวกเขา แนวคิดของเครื่องยนต์ไอพ่นก็เหมือนกับแนวคิดทางเทคนิคหลายๆ อย่างที่เป็นรากฐานของเทคโนโลยีสมัยใหม่ ย้อนกลับไปที่ สมัยโบราณ. ขั้นตอนสำคัญในการพัฒนาแนวคิดเรื่องการขับเคลื่อนด้วยไอพ่นคือข้อเสนอให้ใช้จรวดเป็นเครื่องยนต์สำหรับเครื่องบิน แนวคิดนี้จัดทำขึ้นครั้งแรกโดยนักปฏิวัติชาวรัสเซีย N. I. Kibalchich ซึ่งไม่นานก่อนการประหารชีวิตของเขาในเดือนมีนาคม พ.ศ. 2424 ได้เสนอโครงการสำหรับเครื่องบิน (เครื่องบินจรวด) โดยใช้ระบบขับเคลื่อนไอพ่นจากก๊าซผงที่ระเบิดได้ ที่  ต้นศตวรรษที่ 20 นักวิทยาศาสตร์ชาวรัสเซีย K. E. Tsiolkovsky ได้ยืนยันถึงความเป็นไปได้ของเที่ยวบินระหว่างดาวเคราะห์โดยใช้เครื่องยนต์ไอพ่น แนวคิดในการใช้ระบบขับเคลื่อนไอพ่นสำหรับเที่ยวบินนั้นเกิดขึ้นหลังจากการสร้างเครื่องยนต์เจ็ทและจรวด เครื่องยนต์ไอพ่นซึ่งแรงขับเกิดจากแรงของการเคลื่อนที่ของไอพ่นของไอพ่นของก๊าซที่ไหลออกจากหัวฉีดเจ็ทด้วยความเร็วสูง แบ่งออกเป็นสองกลุ่ม กลุ่มแรกคือเครื่องยนต์ไอพ่นไร้คอมเพรสเซอร์ เช่น เครื่องยนต์ที่อากาศในห้องเผาไหม้ถูกบีบอัดเนื่องจากแรงดันอากาศแบบไดนามิก โดยทั่วไปมากที่สุดในหมู่พวกเขาคือสิ่งที่เรียกว่ามอเตอร์แรมเจ็ท เครื่องยนต์ Scramjet ใช้อากาศในบรรยากาศเป็นตัวออกซิไดซ์ ความคิดของเครื่องยนต์เจ็ทได้รับการหยิบยกมามากกว่าหนึ่งครั้งใน ประเทศต่างๆรวมทั้งในรัสเซีย แต่งานต้นฉบับที่สำคัญที่สุดในแง่นี้คือการศึกษาที่ดำเนินการในปี พ.ศ. 2451-2456 นักวิทยาศาสตร์ชาวฝรั่งเศส R. Loren ซึ่งโดยเฉพาะอย่างยิ่งในปี 1911 ได้เสนอโครงร่างจำนวนหนึ่งสำหรับเครื่องยนต์ ramjet ในเดือนพฤษภาคม พ.ศ. 2482 จรวดพร้อมเครื่องยนต์แรมเจ็ทซึ่งออกแบบโดย I. A. Merkulov ได้รับการทดสอบในสหภาพโซเวียตเป็นครั้งแรก มันเป็นจรวดสองขั้นตอน (ระยะแรกคือจรวดผง) ที่มีน้ำหนักบินขึ้น 7.07 กก. และน้ำหนักเชื้อเพลิงสำหรับขั้นตอนที่สองของเครื่องยนต์แรมเจ็ทเพียง 2 กก. ในระหว่างการทดสอบ จรวดมีความสูง 2 กม. ในปี พ.ศ. 2482-2483 เป็นครั้งแรกในโลกในสหภาพโซเวียตที่ทำการทดสอบการบินของเครื่องยนต์ไอพ่นที่ติดตั้งเป็นเครื่องยนต์เพิ่มเติมบนเครื่องบินที่ออกแบบโดย N. N. Polikarpov ในปี 1942 เครื่องยนต์ ramjet ที่ออกแบบโดย E. Zenger ได้รับการทดสอบในประเทศเยอรมนี อย่างไรก็ตาม การใช้เครื่องยนต์ ramjet มีผลเพียงพอเฉพาะในสภาวะที่ ความเร็วสูงการบินของเครื่องบิน - ความเร็วเหนือเสียงที่อากาศจะระเบิดเข้าไปในห้องเผาไหม้ของเครื่องยนต์ภายใต้ความกดดันที่ค่อนข้างสูง ดังนั้นนักออกแบบของหลายประเทศจึงทำงานอย่างหนักเพื่อปรับปรุงเครื่องมือเหล่านี้ ที่
ต้นศตวรรษที่ 20 นักวิทยาศาสตร์ชาวรัสเซีย K. E. Tsiolkovsky ได้ยืนยันถึงความเป็นไปได้ของเที่ยวบินระหว่างดาวเคราะห์โดยใช้เครื่องยนต์ไอพ่น แนวคิดในการใช้ระบบขับเคลื่อนไอพ่นสำหรับเที่ยวบินนั้นเกิดขึ้นหลังจากการสร้างเครื่องยนต์เจ็ทและจรวด เครื่องยนต์ไอพ่นซึ่งแรงขับเกิดจากแรงของการเคลื่อนที่ของไอพ่นของไอพ่นของก๊าซที่ไหลออกจากหัวฉีดเจ็ทด้วยความเร็วสูง แบ่งออกเป็นสองกลุ่ม กลุ่มแรกคือเครื่องยนต์ไอพ่นไร้คอมเพรสเซอร์ เช่น เครื่องยนต์ที่อากาศในห้องเผาไหม้ถูกบีบอัดเนื่องจากแรงดันอากาศแบบไดนามิก โดยทั่วไปมากที่สุดในหมู่พวกเขาคือสิ่งที่เรียกว่ามอเตอร์แรมเจ็ท เครื่องยนต์ Scramjet ใช้อากาศในบรรยากาศเป็นตัวออกซิไดซ์ ความคิดของเครื่องยนต์เจ็ทได้รับการหยิบยกมามากกว่าหนึ่งครั้งใน ประเทศต่างๆรวมทั้งในรัสเซีย แต่งานต้นฉบับที่สำคัญที่สุดในแง่นี้คือการศึกษาที่ดำเนินการในปี พ.ศ. 2451-2456 นักวิทยาศาสตร์ชาวฝรั่งเศส R. Loren ซึ่งโดยเฉพาะอย่างยิ่งในปี 1911 ได้เสนอโครงร่างจำนวนหนึ่งสำหรับเครื่องยนต์ ramjet ในเดือนพฤษภาคม พ.ศ. 2482 จรวดพร้อมเครื่องยนต์แรมเจ็ทซึ่งออกแบบโดย I. A. Merkulov ได้รับการทดสอบในสหภาพโซเวียตเป็นครั้งแรก มันเป็นจรวดสองขั้นตอน (ระยะแรกคือจรวดผง) ที่มีน้ำหนักบินขึ้น 7.07 กก. และน้ำหนักเชื้อเพลิงสำหรับขั้นตอนที่สองของเครื่องยนต์แรมเจ็ทเพียง 2 กก. ในระหว่างการทดสอบ จรวดมีความสูง 2 กม. ในปี พ.ศ. 2482-2483 เป็นครั้งแรกในโลกในสหภาพโซเวียตที่ทำการทดสอบการบินของเครื่องยนต์ไอพ่นที่ติดตั้งเป็นเครื่องยนต์เพิ่มเติมบนเครื่องบินที่ออกแบบโดย N. N. Polikarpov ในปี 1942 เครื่องยนต์ ramjet ที่ออกแบบโดย E. Zenger ได้รับการทดสอบในประเทศเยอรมนี อย่างไรก็ตาม การใช้เครื่องยนต์ ramjet มีผลเพียงพอเฉพาะในสภาวะที่ ความเร็วสูงการบินของเครื่องบิน - ความเร็วเหนือเสียงที่อากาศจะระเบิดเข้าไปในห้องเผาไหม้ของเครื่องยนต์ภายใต้ความกดดันที่ค่อนข้างสูง ดังนั้นนักออกแบบของหลายประเทศจึงทำงานอย่างหนักเพื่อปรับปรุงเครื่องมือเหล่านี้ ที่ 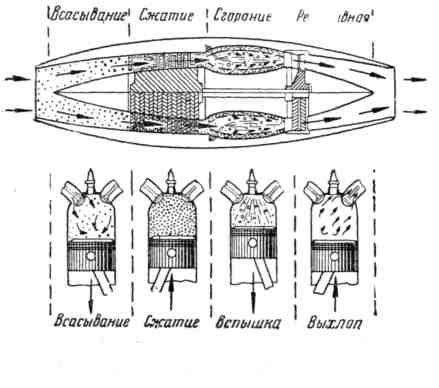 การพัฒนาเครื่องยนต์ไอพ่นมีความสำคัญอย่างยิ่งต่อเครื่องยนต์แอร์เจ็ทอีกกลุ่มหนึ่ง นั่นคือ เครื่องยนต์เทอร์โบเจ็ท
เครื่องยนต์ Turboprop มีกังหันก๊าซที่ขับเคลื่อนคอมเพรสเซอร์ที่บังคับอากาศเข้าไปในห้องเผาไหม้ (นอกเหนือจากการอัดอากาศที่เข้ามาจากหัวความเร็ว) และใช้ก๊าซไอเสียสำหรับการขับเคลื่อนด้วยไอพ่น หากสี่จังหวะในกระบอกสูบเครื่องยนต์ลูกสูบสลับกันตามเวลา กระบวนการที่เกิดขึ้นในเครื่องยนต์ไอพ่นเทอร์โบคอมเพรสเซอร์จะสลับกันในอวกาศ นักวิทยาศาสตร์ชาวรัสเซียทำงานอย่างหนักในการประดิษฐ์เครื่องยนต์เทอร์โบเจ็ท ในปี 1909 การออกแบบเครื่องยนต์เทอร์โบเจ็ทได้รับการพัฒนาโดยวิศวกร N. Gerasimov ในปี ค.ศ. 1914 นาวาตรีแห่งกองทัพเรือรัสเซีย M.N. Nikolskoy ได้ออกแบบและสร้างแบบจำลองเครื่องยนต์เครื่องบินใบพัด ผลิตภัณฑ์ที่เกิดจากการเผาไหม้ด้วยแก๊สของส่วนผสมของน้ำมันสนและกรดไนตริกทำหน้าที่เป็นสารทำงานในการขับเคลื่อนกังหันสามขั้นตอน กังหันทำงานไม่เพียงแต่สำหรับใบพัดเท่านั้น: ผลิตภัณฑ์จากการเผาไหม้ของก๊าซไอเสียที่ส่งตรงไปยังหัวฉีดหาง (เจ็ท) ที่สร้างขึ้น แรงขับเจ็ทนอกจากแรงขับของใบพัด สิ่งที่น่าสนใจอย่างยิ่งคือการออกแบบเครื่องยนต์ไอพ่นเทอร์โบคอมเพรสเซอร์สำหรับเครื่องบินโดย V. I. Bazarov ซึ่งพัฒนาขึ้นในปี 1924 โรงงานผลิตกังหันก๊าซบนเครื่องบินแห่งนี้ (ที่มีการเผาไหม้เชื้อเพลิงที่ความดันคงที่) ประกอบด้วยสามองค์ประกอบ: ห้องเผาไหม้ กังหันก๊าซ และ คอมเพรสเซอร์. เป็นครั้งแรกที่การไหลของอากาศอัดที่นี่แบ่งออกเป็นสองสาขา: ส่วนที่เล็กกว่าเข้าไปในห้องเผาไหม้ (ไปที่หัวเผา) และส่วนที่ใหญ่กว่านั้นถูกผสมกับก๊าซที่ใช้งานได้เพื่อลดอุณหภูมิด้านหน้ากังหัน สิ่งนี้ทำให้มั่นใจได้ถึงความปลอดภัยของใบพัดกังหัน พลังของกังหันหลายใบพัดถูกใช้เพื่อขับเคลื่อนคอมเพรสเซอร์แบบแรงเหวี่ยงของเครื่องยนต์เองและบางส่วนเพื่อหมุนใบพัด นอกจากใบพัดแล้ว แรงขับยังถูกสร้างขึ้นเนื่องจากปฏิกิริยาของไอพ่นของก๊าซที่ไหลผ่านหัวฉีดหาง เครื่องยนต์ขับเคลื่อนด้วยของเหลวมีความสำคัญเป็นพิเศษสำหรับการสร้างจรวดและขีปนาวุธ อาวุธจรวดถูกนำมาใช้กันอย่างแพร่หลายในช่วงสงครามโลกครั้งที่สอง เครื่องยิงจรวด Katyusha ของโซเวียตมีชื่อเสียงเป็นพิเศษ
การพัฒนาเครื่องยนต์ไอพ่นมีความสำคัญอย่างยิ่งต่อเครื่องยนต์แอร์เจ็ทอีกกลุ่มหนึ่ง นั่นคือ เครื่องยนต์เทอร์โบเจ็ท
เครื่องยนต์ Turboprop มีกังหันก๊าซที่ขับเคลื่อนคอมเพรสเซอร์ที่บังคับอากาศเข้าไปในห้องเผาไหม้ (นอกเหนือจากการอัดอากาศที่เข้ามาจากหัวความเร็ว) และใช้ก๊าซไอเสียสำหรับการขับเคลื่อนด้วยไอพ่น หากสี่จังหวะในกระบอกสูบเครื่องยนต์ลูกสูบสลับกันตามเวลา กระบวนการที่เกิดขึ้นในเครื่องยนต์ไอพ่นเทอร์โบคอมเพรสเซอร์จะสลับกันในอวกาศ นักวิทยาศาสตร์ชาวรัสเซียทำงานอย่างหนักในการประดิษฐ์เครื่องยนต์เทอร์โบเจ็ท ในปี 1909 การออกแบบเครื่องยนต์เทอร์โบเจ็ทได้รับการพัฒนาโดยวิศวกร N. Gerasimov ในปี ค.ศ. 1914 นาวาตรีแห่งกองทัพเรือรัสเซีย M.N. Nikolskoy ได้ออกแบบและสร้างแบบจำลองเครื่องยนต์เครื่องบินใบพัด ผลิตภัณฑ์ที่เกิดจากการเผาไหม้ด้วยแก๊สของส่วนผสมของน้ำมันสนและกรดไนตริกทำหน้าที่เป็นสารทำงานในการขับเคลื่อนกังหันสามขั้นตอน กังหันทำงานไม่เพียงแต่สำหรับใบพัดเท่านั้น: ผลิตภัณฑ์จากการเผาไหม้ของก๊าซไอเสียที่ส่งตรงไปยังหัวฉีดหาง (เจ็ท) ที่สร้างขึ้น แรงขับเจ็ทนอกจากแรงขับของใบพัด สิ่งที่น่าสนใจอย่างยิ่งคือการออกแบบเครื่องยนต์ไอพ่นเทอร์โบคอมเพรสเซอร์สำหรับเครื่องบินโดย V. I. Bazarov ซึ่งพัฒนาขึ้นในปี 1924 โรงงานผลิตกังหันก๊าซบนเครื่องบินแห่งนี้ (ที่มีการเผาไหม้เชื้อเพลิงที่ความดันคงที่) ประกอบด้วยสามองค์ประกอบ: ห้องเผาไหม้ กังหันก๊าซ และ คอมเพรสเซอร์. เป็นครั้งแรกที่การไหลของอากาศอัดที่นี่แบ่งออกเป็นสองสาขา: ส่วนที่เล็กกว่าเข้าไปในห้องเผาไหม้ (ไปที่หัวเผา) และส่วนที่ใหญ่กว่านั้นถูกผสมกับก๊าซที่ใช้งานได้เพื่อลดอุณหภูมิด้านหน้ากังหัน สิ่งนี้ทำให้มั่นใจได้ถึงความปลอดภัยของใบพัดกังหัน พลังของกังหันหลายใบพัดถูกใช้เพื่อขับเคลื่อนคอมเพรสเซอร์แบบแรงเหวี่ยงของเครื่องยนต์เองและบางส่วนเพื่อหมุนใบพัด นอกจากใบพัดแล้ว แรงขับยังถูกสร้างขึ้นเนื่องจากปฏิกิริยาของไอพ่นของก๊าซที่ไหลผ่านหัวฉีดหาง เครื่องยนต์ขับเคลื่อนด้วยของเหลวมีความสำคัญเป็นพิเศษสำหรับการสร้างจรวดและขีปนาวุธ อาวุธจรวดถูกนำมาใช้กันอย่างแพร่หลายในช่วงสงครามโลกครั้งที่สอง เครื่องยิงจรวด Katyusha ของโซเวียตมีชื่อเสียงเป็นพิเศษ 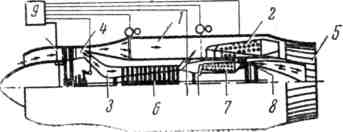 ที่
ที่  ปัจจุบันให้ความสนใจอย่างมากกับการปรับปรุงเครื่องยนต์เครื่องบินไอพ่น บน ความเร็วต่างกันการบิน ใช้เครื่องยนต์ประเภทต่างๆ และขนาดของกำลังขึ้นอยู่กับทั้งประสิทธิภาพทางความร้อนและแรงฉุด นั่นคือ พลังงานกลที่ได้จากการเผาไหม้เชื้อเพลิงจะถูกแปลงเป็นพลังงานของการเคลื่อนที่ของเครื่องบินอย่างไร ข้อดีของเครื่องยนต์ไอพ่นที่ทันสมัยเหนือเครื่องยนต์ลูกสูบนั้นสามารถมองเห็นได้จากข้อมูลต่อไปนี้ หากยกตัวอย่างเช่น เครื่องบินเจ็ทที่มีแรงผลัก 4300 กก. จากนั้นที่ความเร็วการบิน 1100 กม. / ชม. แรงขับนี้จะเทียบเท่ากับกำลังของเครื่องยนต์ลูกสูบ 35,000 ลิตร s หนัก 14 ตัน ประมาณ 3-4 เท่า น้ำหนักมากขึ้นเครื่องยนต์ไอพ่น สิ่งที่น่าสนใจคือเครื่องยนต์ turbojet ภาษาอังกฤษ "Giron" ที่สร้างขึ้นในช่วงครึ่งหลังของยุค 50 สำหรับเครื่องบินที่มีความเร็วเกินความเร็วของการขยายเสียง เครื่องยนต์มีแรงผลักที่ 6,800 กก. (15,000 ปอนด์) และมีวัตถุประสงค์เพื่อเพิ่มเป็น 8,000 กก. โดยไม่เกินขีดจำกัดอุณหภูมิขาเข้าของเทอร์ไบน์ที่มีอยู่ ให้ความสนใจอย่างมากกับประสิทธิภาพของการรับอากาศ เชื่อกันว่าเป็นประโยชน์อย่างยิ่งในการติดตั้งเครื่องยนต์สองประเภทพร้อมกันบนเครื่องบินรบความเร็วเหนือเสียง: เทอร์โบเจ็ทหนึ่งชุดและจรวดหนึ่งลำ เนื่องจากการผสมผสานดังกล่าวช่วยปรับปรุงประสิทธิภาพการบินของเครื่องบินที่ระดับความสูง 18 กม. ขึ้นไป เครื่องยนต์ที่หลากหลายซึ่งอยู่ระหว่างการก่อสร้างและใช้งานอยู่เป็นคุณลักษณะเฉพาะของความก้าวหน้าทางเทคนิคในอุตสาหกรรมอากาศยาน ปีที่ผ่านมา.
ปัจจุบันให้ความสนใจอย่างมากกับการปรับปรุงเครื่องยนต์เครื่องบินไอพ่น บน ความเร็วต่างกันการบิน ใช้เครื่องยนต์ประเภทต่างๆ และขนาดของกำลังขึ้นอยู่กับทั้งประสิทธิภาพทางความร้อนและแรงฉุด นั่นคือ พลังงานกลที่ได้จากการเผาไหม้เชื้อเพลิงจะถูกแปลงเป็นพลังงานของการเคลื่อนที่ของเครื่องบินอย่างไร ข้อดีของเครื่องยนต์ไอพ่นที่ทันสมัยเหนือเครื่องยนต์ลูกสูบนั้นสามารถมองเห็นได้จากข้อมูลต่อไปนี้ หากยกตัวอย่างเช่น เครื่องบินเจ็ทที่มีแรงผลัก 4300 กก. จากนั้นที่ความเร็วการบิน 1100 กม. / ชม. แรงขับนี้จะเทียบเท่ากับกำลังของเครื่องยนต์ลูกสูบ 35,000 ลิตร s หนัก 14 ตัน ประมาณ 3-4 เท่า น้ำหนักมากขึ้นเครื่องยนต์ไอพ่น สิ่งที่น่าสนใจคือเครื่องยนต์ turbojet ภาษาอังกฤษ "Giron" ที่สร้างขึ้นในช่วงครึ่งหลังของยุค 50 สำหรับเครื่องบินที่มีความเร็วเกินความเร็วของการขยายเสียง เครื่องยนต์มีแรงผลักที่ 6,800 กก. (15,000 ปอนด์) และมีวัตถุประสงค์เพื่อเพิ่มเป็น 8,000 กก. โดยไม่เกินขีดจำกัดอุณหภูมิขาเข้าของเทอร์ไบน์ที่มีอยู่ ให้ความสนใจอย่างมากกับประสิทธิภาพของการรับอากาศ เชื่อกันว่าเป็นประโยชน์อย่างยิ่งในการติดตั้งเครื่องยนต์สองประเภทพร้อมกันบนเครื่องบินรบความเร็วเหนือเสียง: เทอร์โบเจ็ทหนึ่งชุดและจรวดหนึ่งลำ เนื่องจากการผสมผสานดังกล่าวช่วยปรับปรุงประสิทธิภาพการบินของเครื่องบินที่ระดับความสูง 18 กม. ขึ้นไป เครื่องยนต์ที่หลากหลายซึ่งอยู่ระหว่างการก่อสร้างและใช้งานอยู่เป็นคุณลักษณะเฉพาะของความก้าวหน้าทางเทคนิคในอุตสาหกรรมอากาศยาน ปีที่ผ่านมา.
บทสรุป.
ในงานของฉัน ฉันได้ตรวจสอบบทบาทของเครื่องยนต์ในด้านวิทยาศาสตร์และความก้าวหน้าของโลก เครื่องยนต์มีส่วนผลักดันอย่างมากในการพัฒนาอุตสาหกรรม ยานยนต์ การสร้างสะพาน การสร้างเครื่องบิน ซึ่งเป็นสิ่งใหม่หมดในสมัยนั้น โครงสร้างของเครื่องยนต์มีความซับซ้อนมากขึ้นเรื่อย ๆ ซึ่งเป็นเครื่องยืนยันถึงการพัฒนาและ "การเสริมกำลัง" ของมนุษย์ในด้านวิทยาศาสตร์ แต่หลักการทำงานของเครื่องยนต์ แม้กระทั่งในยุคของเครื่องจักรและคอมพิวเตอร์ ยังคงเหมือนเดิม โดยพูดถึง "ความสมบูรณ์แบบในโครงสร้างของสิ่งประดิษฐ์ต่างๆ" เครื่องยนต์ได้กลายเป็นพื้นฐานของชีวิตมนุษย์ ถ้าเราเปรียบเทียบ ประเภทต่างๆกลไกในความก้าวหน้าของโลก บทบาทของพวกเขาถูกเปิดเผยในสาขาวิทยาศาสตร์และเทคโนโลยีเฉพาะบางสาขา ตัวอย่างเช่น เครื่องจักรไอน้ำได้เปลี่ยนอุตสาหกรรมในสมัยนั้นโดยสิ้นเชิง เนื่องจากขอบเขต: ในเหมือง เหมือง (สำหรับสูบน้ำ) และในโรงงาน (สำหรับการนำเครื่องจักรประเภทต่างๆ มาใช้งาน) ไม่มีอุปกรณ์อื่นสำหรับวัตถุประสงค์เหล่านี้ในศตวรรษที่ 13 แต่เครื่องจักรวัตต์เริ่มทยอยออกจากฉากวิทยาศาสตร์และเทคโนโลยี เนื่องจากมีความเทอะทะ ประสิทธิภาพต่ำ และไม่ใช่เชื้อเพลิงที่ "สะดวก" สำหรับการใช้งานในระยะยาว ถึงเวลาแล้วสำหรับอุปกรณ์ที่ใช้งานได้จริงและประหยัดกว่าซึ่งไม่ต้องการเชื้อเพลิงชนิดพิเศษ เช่น มอเตอร์ไฟฟ้า ในความคิดของฉัน มอเตอร์ไฟฟ้ามีอิทธิพลต่อชีวิตและชีวิตของผู้คนเป็นหลัก อย่างไรก็ตาม มอเตอร์ไฟฟ้าไม่เพียงแต่แปลงพลังงานไฟฟ้าเป็นพลังงานกลเท่านั้น แต่ในทางกลับกันด้วย พวกเขาให้บริการมนุษยชาติเป็นเครื่องกำเนิดกระแสไฟฟ้า และนั่นก็ถูกนำไปใช้ในทุกด้านของกิจกรรมของมนุษย์ พวกเขาค่อย ๆ เริ่มเปลี่ยนเครื่องยนต์ไอน้ำในโรงงานและโรงงาน ความช้าของการเปลี่ยนเครื่องยนต์ไอน้ำด้วยมอเตอร์ไฟฟ้านั้นเกิดจากความจริงที่ว่าไม่มีการพัฒนาการส่งกระแสไฟฟ้าในระยะทางไกลในช่วงเวลานั้น แต่แม้กระทั่งอุปกรณ์เช่นเครื่องยนต์ไอน้ำและมอเตอร์ไฟฟ้าก็ไม่ได้ให้ความคล่องตัวและความเป็นกันเองของบุคคล เพื่อจุดประสงค์เหล่านี้ เครื่องยนต์สันดาปภายในถูกประดิษฐ์ขึ้น เป็นสากลและทำงานโดยใช้เชื้อเพลิงเหลว ขอบเขตของเครื่องยนต์สันดาปภายในไม่ได้สิ้นสุดแค่ในยานยนต์เท่านั้น เหล่านี้คือเครื่องกำเนิดไฟฟ้าดีเซล เลื่อยไฟฟ้า รุ่นเครื่องบิน เป็นต้น เครื่องยนต์สันดาปภายในเครื่องแรกไม่ประสบความสำเร็จอย่างมากจนกระทั่งสิ้นสุดศตวรรษที่ 19 เนื่องจากคนในสมัยนั้นเคร่งศาสนามาก และกลัว "สัตว์ประหลาดที่มีเสียงดัง" จะเคลื่อนที่ไปตามถนนในเมือง ด้วยเหตุนี้ Mercedes และ Daimler จึงทดสอบรถของพวกเขาในเวลากลางคืนเท่านั้น แต่ ICE ได้รับความมั่นใจและกำลังพัฒนาและนำไปใช้กับ วันนี้. โลกกำลังเปลี่ยนแปลง จังหวะชีวิตกำลังเปลี่ยนแปลง แต่มีเพียงเครื่องยนต์เท่านั้นที่ยังคงขับเคลื่อนโลกได้โดยไม่ล้มเหลว ในทุกเครื่อง, เครื่องมือกล, อุปกรณ์มี "หัวใจเหล็ก" ที่หึ่ง ๆ นำเสนอโดยนักวิทยาศาสตร์ผู้ยิ่งใหญ่สู่โลก มีการปรับปรุง เปลี่ยนแปลง ทันสมัยอยู่เสมอ สิ่งนี้พูดถึงความเรียบง่าย แต่ในขณะเดียวกันก็มีความสมบูรณ์แบบของเครื่องยนต์ที่ประดิษฐ์ขึ้น เครื่องยนต์เคย "ล้ำหน้ากว่าคนอื่น" และตอนนี้พวกเขาพอใจกับบทบาทพิเศษแล้ว แต่หากไม่มีฝูงชนกลุ่มนี้ เป็นไปไม่ได้เลยที่จะประดิษฐ์เครื่องจักรและเครื่องมือกล การพัฒนาของมวลมนุษยชาติ วิทยาศาสตร์เคลื่อนตัวไปทั่วโลกอย่างไม่เร่งรีบ และเครื่องยนต์ก็เต้นอยู่ในอก - ในความหมายที่แท้จริงของคำ
บรรณานุกรม.
"ฉันรู้จักโลก" ก. ลีโอโนวิช มอสโก LLC สำนักพิมพ์ Astrel 2002 509p.
"ประวัติศาสตร์เทคโนโลยี". ยูเคมิลานอฟ มอสโก "ซอตเซกกิซ" 2505 772pp.
"สารานุกรมสำหรับเด็ก". เล่มที่ 14. เทคนิค. นพ.อักเซโนวา มอสโก "อแวนต้า+". 2001 688หน้า
"สารานุกรมสำหรับเด็ก". เล่มที่ 11 ฟิสิกส์ ส่วนที่ 2 V.A. Volodin มอสโก "อแวนต้าพลัส" 2001 432p.
"เครื่องยนต์ลูกสูบความเร็วสูง" A.M. Gugin เลนินกราด "วิศวกรรม". พ.ศ. 2510 259น.
บทนำ.
เครื่องจักรไฟฟ้าใช้กันอย่างแพร่หลายในโรงไฟฟ้า ในอุตสาหกรรม การขนส่ง การบิน ในระบบควบคุมและควบคุมอัตโนมัติ และในชีวิตประจำวัน
เครื่องจักรไฟฟ้าแปลงพลังงานกลเป็นพลังงานไฟฟ้าและในทางกลับกัน เครื่องที่แปลงพลังงานกลเป็นพลังงานไฟฟ้าเรียกว่าเครื่องกำเนิดไฟฟ้า การแปลงพลังงานไฟฟ้าเป็นพลังงานกลดำเนินการโดยมอเตอร์
เครื่องจักรไฟฟ้าใด ๆ สามารถใช้เป็นเครื่องกำเนิดไฟฟ้าและเป็นมอเตอร์ไฟฟ้า คุณสมบัติของเครื่องจักรไฟฟ้าในการเปลี่ยนทิศทางของพลังงานที่แปลงนี้เรียกว่าการย้อนกลับของเครื่อง เครื่องจักรไฟฟ้ายังสามารถใช้เพื่อแปลงพลังงานไฟฟ้าของกระแสไฟฟ้าชนิดหนึ่ง (ความถี่ จำนวนเฟสของกระแสสลับ แรงดันไฟกระแสตรง) เป็นพลังงานของกระแสไฟฟ้าประเภทอื่น เครื่องจักรไฟฟ้าดังกล่าวเรียกว่าคอนเวอร์เตอร์
ขึ้นอยู่กับชนิดของกระแสไฟของการติดตั้งไฟฟ้าที่เครื่องจักรต้องทำงาน โดยจะแบ่งออกเป็นเครื่องไฟฟ้ากระแสตรงและไฟฟ้ากระแสสลับ
เครื่อง AC สามารถเป็นเฟสเดียวหรือหลายเฟส เครื่องที่ใช้กันอย่างแพร่หลายคือเครื่องซิงโครนัสและอะซิงโครนัสสามเฟสรวมทั้งเครื่องสายสวนกระแสสลับซึ่งช่วยให้สามารถควบคุมความเร็วได้อย่างประหยัดในช่วงกว้าง
ปัจจุบัน มอเตอร์แบบอะซิงโครนัสเป็นเครื่องจักรไฟฟ้าทั่วไป พวกเขาใช้ไฟฟ้าประมาณ 50% ที่ผลิตโดยโรงไฟฟ้าของประเทศ มอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีการใช้กันอย่างแพร่หลายเนื่องจากความเรียบง่ายในการออกแบบ ต้นทุนต่ำ และความน่าเชื่อถือในการทำงานสูง มีประสิทธิภาพค่อนข้างสูง: ที่กำลังไฟมากกว่า 1 กิโลวัตต์ ประสิทธิภาพ = 0.7:0.95 และเฉพาะในไมโครมอเตอร์เท่านั้นที่จะลดลงเหลือ 0.2-0.65
นอกจากข้อดีที่ยอดเยี่ยมแล้ว มอเตอร์แบบอะซิงโครนัสยังมีข้อเสียบางประการ: การบริโภคจากเครือข่าย กระแสปฏิกิริยาจำเป็นต้องสร้างฟลักซ์แม่เหล็กซึ่งเป็นผลมาจากการที่มอเตอร์แบบอะซิงโครนัสทำงานด้วย cos \u003d 1 นอกจากนี้ยังด้อยกว่ามอเตอร์กระแสตรงในแง่ของความสามารถในการควบคุมความเร็วในการหมุน
การปรากฏตัวของมอเตอร์แบบอะซิงโครนัสสามเฟสนั้นสัมพันธ์กับชื่อ M.O. Dolivo-Dobrovolsky เครื่องยนต์เหล่านี้ถูกคิดค้นโดยเขาในปี พ.ศ. 2432
หลักการทำงานของมอเตอร์แบบอะซิงโครนัส
ที่พบมากที่สุดในหมู่ มอเตอร์ไฟฟ้าได้รับมอเตอร์แบบอะซิงโครนัสสามเฟสซึ่งออกแบบโดยช่างไฟฟ้าชาวรัสเซียที่มีชื่อเสียง M.O. Dolivo-Dobrovolsky
มอเตอร์แบบอะซิงโครนัสมีการออกแบบที่เรียบง่ายและบำรุงรักษาง่าย เช่นเดียวกับเครื่อง AC มอเตอร์เหนี่ยวนำประกอบด้วยสองส่วนหลัก - โรเตอร์และสเตเตอร์ สเตเตอร์เป็นส่วนที่อยู่กับที่ของเครื่อง โรเตอร์เป็นส่วนที่หมุนได้ เครื่องอะซิงโครนัสมีคุณสมบัติของการย้อนกลับได้นั่นคือสามารถใช้ได้ทั้งในโหมดเครื่องกำเนิดไฟฟ้าและในโหมดเครื่องยนต์ เนื่องจากติดเรท ข้อบกพร่องที่สำคัญ เครื่องกำเนิดไฟฟ้าแบบอะซิงโครนัสไม่ได้ใช้งานจริงในขณะที่มอเตอร์แบบอะซิงโครนัสนั้นแพร่หลายมาก
ขดลวด AC แบบหลายเฟสสร้างสนามแม่เหล็กหมุน ซึ่งคำนวณความเร็วรอบต่อนาทีโดยสูตร:
n1=60f1/p,
โดยที่: n คือความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์
f คือความถี่ของกระแสในเครือข่าย
p คือจำนวนคู่ของเสา
หากโรเตอร์หมุนด้วยความถี่เท่ากับความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์ ความถี่นี้จะเรียกว่าซิงโครนัส
หากโรเตอร์หมุนด้วยความถี่ที่ไม่เท่ากับความถี่ของสนามแม่เหล็กสเตเตอร์ ความถี่นี้จะเรียกว่าอะซิงโครนัส
ในมอเตอร์แบบอะซิงโครนัส กระบวนการทำงานสามารถทำได้ที่ความถี่แบบอะซิงโครนัสเท่านั้น นั่นคือที่ความเร็วของโรเตอร์ที่ไม่เท่ากับความเร็วของสนามแม่เหล็ก
จัดอันดับความเร็ว มอเตอร์เหนี่ยวนำขึ้นอยู่กับความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์และไม่สามารถเลือกได้โดยพลการ ด้วยความถี่กระแสไฟอุตสาหกรรมมาตรฐาน f1=50Hz ความเร็วซิงโครนัสที่เป็นไปได้ (ความเร็วของสนามแม่เหล็ก) n1=60f1/p=3000/p
ทำงาน มอเตอร์แบบอะซิงโครนัสจากปรากฏการณ์ที่เรียกว่า “จานอาราโก-เลนซ์”
ปรากฏการณ์นี้มีดังนี้: หากวางดิสก์ทองแดงไว้ด้านหน้าแถบแม่เหล็กถาวรนั่งบนแกนได้อย่างอิสระและแม่เหล็กเริ่มหมุนรอบแกนด้วยที่จับดิสก์ทองแดงจะหมุนใน ทิศทางเดียวกัน นี่เป็นเพราะความจริงที่ว่าเมื่อแม่เหล็กหมุน สนามแม่เหล็กของมันจะแทรกซึมเข้าไปในดิสก์และทำให้เกิดกระแสน้ำวนในนั้น อันเป็นผลมาจากปฏิสัมพันธ์ของกระแสน้ำวนกับสนามแม่เหล็กของแม่เหล็กทำให้เกิดแรงที่ทำให้ดิสก์หมุน ตามกฎของ Lenz ทิศทางของกระแสอุปนัยใด ๆ ที่จะต่อต้านสาเหตุที่ทำให้เกิด ดังนั้นกระแสน้ำวนในร่างกายของดิสก์จึงมีแนวโน้มที่จะชะลอการหมุนของแม่เหล็ก แต่หากไม่สามารถทำได้ จะทำให้ดิสก์หมุนตามแม่เหล็ก ในกรณีนี้ ความเร็วในการหมุนของดิสก์จะน้อยกว่าความเร็วในการหมุนของแม่เหล็กเสมอ หากด้วยเหตุผลบางอย่างอนุภาคเหล่านี้กลายเป็นแบบเดียวกัน สนามแม่เหล็กจะไม่เคลื่อนที่สัมพันธ์กับดิสก์ และด้วยเหตุนี้ กระแสน้ำวนจะไม่เกิดขึ้น นั่นคือ จะไม่มีแรงภายใต้อิทธิพลที่ดิสก์หมุน .
ในมอเตอร์แบบอะซิงโครนัส แม่เหล็กถาวรแทนที่ด้วยสนามแม่เหล็กหมุนที่สร้างขึ้น ขดลวดสามเฟสสเตเตอร์เมื่อเชื่อมต่อกับไฟ AC
สนามแม่เหล็กหมุนของสเตเตอร์ตัดผ่านตัวนำของขดลวดโรเตอร์และเหนี่ยวนำให้เกิด EMF ในตัว นั่นคือ แรงเคลื่อนไฟฟ้า หากขดลวดของโรเตอร์ถูกปิดโดยมีความต้านทานหรือไฟฟ้าลัดวงจร กระแสไฟฟ้าจะไหลผ่านมันภายใต้การกระทำของแรงเคลื่อนไฟฟ้าที่เหนี่ยวนำ
อันเป็นผลมาจากปฏิสัมพันธ์ของกระแสในขดลวดโรเตอร์กับสนามแม่เหล็กหมุนของขดลวดสเตเตอร์ทำให้เกิดโมเมนต์หมุนภายใต้อิทธิพลที่โรเตอร์เริ่มหมุนไปในทิศทางของการหมุนของสนามแม่เหล็ก
หากเราคิดว่าในบางช่วงเวลาความเร็วของโรเตอร์จะเท่ากับความเร็วของสนามสเตเตอร์ ตัวนำที่คดเคี้ยวของโรเตอร์จะไม่ข้ามสนามแม่เหล็กสเตเตอร์และจะไม่มีกระแสในโรเตอร์ ในกรณีนี้ แรงบิดจะกลายเป็นศูนย์และความเร็วของโรเตอร์จะลดลงเมื่อเทียบกับความเร็วของสนามสเตเตอร์ จนกระทั่งเกิดแรงบิดที่สมดุลแรงบิดเบรก ซึ่งเป็นผลรวมของแรงบิดโหลดบนเพลาและแรงบิดเสียดทานในเครื่อง
เครื่องอะซิงโครนัสนอกเหนือจากโหมดมอเตอร์สามารถทำงานในโหมดเครื่องกำเนิดไฟฟ้าและโหมดเบรกแม่เหล็กไฟฟ้าได้
โหมดเครื่องกำเนิดไฟฟ้าเกิดขึ้นเมื่อโรเตอร์ด้วยความช่วยเหลือของ มอเตอร์ถาวรหมุนไปในทิศทางการหมุนของสนามแม่เหล็กด้วยความถี่การหมุนที่มากกว่าความถี่การหมุนของสนามแม่เหล็ก ดังนั้นการทำงานของเครื่องอะซิงโครนัสในโหมดเครื่องกำเนิดไฟฟ้าจะสอดคล้องกับสลิปตั้งแต่ 0 ถึง - หากโรเตอร์ภายใต้อิทธิพลของแรงภายนอกเริ่มหมุนไปในทิศทางตรงกันข้ามกับทิศทางการหมุนของสนามแม่เหล็ก โหมดเบรกแม่เหล็กไฟฟ้าเกิดขึ้น
โหมดเบรกแม่เหล็กไฟฟ้าเริ่มต้นที่ n=0 และในทางทฤษฎีสามารถดำเนินต่อไปได้จนถึง n= ดังนั้นสลิปจึงอยู่ระหว่าง 1 ถึง +
ในการเปลี่ยนทิศทางการหมุนของโรเตอร์ นั่นคือ การย้อนกลับของมอเตอร์ จำเป็นต้องเปลี่ยนทิศทางการหมุนของสนามแม่เหล็กที่สร้างขึ้นโดยขดลวดสเตเตอร์ ซึ่งทำได้โดยการเปลี่ยนลำดับเฟสของขดลวดสเตเตอร์ ซึ่งจำเป็นต้องสลับสายไฟสองในสามสายที่เชื่อมต่อขดลวดสเตเตอร์กับเครือข่ายโดยคำนึงถึงขั้วต่อเครือข่าย
โดยไม่คำนึงถึงทิศทางการหมุนของโรเตอร์ ความถี่ n จะน้อยกว่าความถี่ของการหมุนของสนามแม่เหล็กสเตเตอร์เสมอ
อุปกรณ์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสประกอบด้วยสองส่วน: ส่วนคงที่ - สเตเตอร์และส่วนที่หมุน - โรเตอร์
แกนสเตเตอร์ซึ่งเป็นทรงกระบอกกลวงประกอบขึ้นจากแผ่นเหล็กไฟฟ้าแยกต่างหากที่มีความหนา 0.5-0.35 มม. สำหรับแกนของมอเตอร์แบบอะซิงโครนัสจะใช้เหล็กไฟฟ้าไอโซโทรนิกรีดเย็นเกรด 2013.02312.02411 และอื่นๆ แผ่นหรือเพลตถูกประทับตราด้วยฟันผุ (ร่อง) หุ้มฉนวนด้วยสารเคลือบเงาหรือสเกลเพื่อลดการสูญเสียอันเนื่องมาจากกระแสน้ำวน ประกอบในแพ็คเกจที่แยกจากกันและติดแน่นในเฟรมเครื่องยนต์
เกราะด้านข้างยังติดอยู่กับเฟรมด้วยตลับลูกปืนซึ่งวางเพลาโรเตอร์ เตียงถูกติดตั้งบนฐานราก
ตัวนำของขดลวดถูกวางในร่องตามยาวของสเตเตอร์ซึ่งเชื่อมต่อถึงกันเพื่อให้เกิดระบบสามเฟสขึ้น มีที่หนีบหกตัวบนโล่ของเครื่องซึ่งเชื่อมต่อจุดเริ่มต้นและจุดสิ้นสุดของขดลวดของแต่ละเฟส ในการเชื่อมต่อขดลวดสเตเตอร์กับ เครือข่ายสามเฟสพวกเขาสามารถเชื่อมต่อในสตาร์หรือเดลต้า ซึ่งทำให้สามารถเชื่อมต่อมอเตอร์กับเครือข่ายที่มีแรงดันไฟฟ้าสองสายที่แตกต่างกัน
ตัวอย่างเช่น เครื่องยนต์สามารถทำงานได้จากเครือข่ายที่มีแรงดันไฟฟ้า 220 และ 127V แรงดันไฟหลักทั้งสองที่ออกแบบมอเตอร์นั้นระบุไว้บนแผงป้องกันของเครื่อง นั่นคือ 220/127v หรือ 380/220v
สำหรับแรงดันไฟฟ้าที่ต่ำกว่าที่ระบุไว้บนโล่ ขดลวดสเตเตอร์จะเชื่อมต่อด้วยรูปสามเหลี่ยม สำหรับแรงดันไฟฟ้าที่สูงขึ้น - โดยดาว
เมื่อเชื่อมต่อขดลวดสเตเตอร์กับรูปสามเหลี่ยมบนโล่ของเครื่อง แคลมป์ด้านบนจะเชื่อมต่อกับจัมเปอร์ไปยังอันล่าง และแคลมป์แต่ละคู่ที่เชื่อมต่อเข้าด้วยกันจะเชื่อมต่อกับสายเชิงเส้นของเครือข่ายสามเฟส ในการเปิดสตาร์ เทอร์มินอลล่างทั้งสามบนโล่จะเชื่อมต่อกับจัมเปอร์ไปยังจุดร่วม และส่วนบนเชื่อมต่อกับสายไฟเชิงเส้นของเครือข่ายสามเฟส
โรเตอร์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสมีสองประเภท: แบบมีไฟฟ้าลัดวงจรและขดลวดแบบเฟส มอเตอร์ประเภทแรกเรียกว่ามอเตอร์แบบอะซิงโครนัสด้วย โรเตอร์กรงกระรอกและตัวที่สอง - มอเตอร์แบบอะซิงโครนัสที่มีเฟสโรเตอร์หรือมอเตอร์แบบอะซิงโครนัสพร้อมวงแหวนสลิป ที่พบมากที่สุดคือมอเตอร์กรงกระรอก
แกนโรเตอร์ยังคัดเลือกจากแผ่นเหล็กหนา 0.5 มม. หุ้มด้วยสารเคลือบเงาหรือสเกล เพื่อลดการสูญเสียจากกระแสน้ำวน
เพลตถูกประทับตราด้วยความกดดันและประกอบเป็นแพ็คเกจที่ติดตั้งบนเพลาของเครื่อง กระบอกสูบที่มีร่องตามยาวถูกสร้างขึ้นจากบรรจุภัณฑ์ซึ่งวางตัวนำของขดลวดโรเตอร์ เครื่องอะซิงโครนัสสามารถใช้เฟสและโรเตอร์กรงกระรอกทั้งนี้ขึ้นอยู่กับชนิดของขดลวด ขดลวดลัดวงจรของโรเตอร์ทำขึ้นตามประเภทของล้อกระรอก ในร่องของโรเตอร์จะวางแท่งขนาดใหญ่เชื่อมต่อที่ปลายด้านท้ายด้วยวงแหวนทองแดง มักจะ ขดลวดลัดวงจรโรเตอร์ทำจากอลูมิเนียม อลูมิเนียมร้อนถูกเทลงในร่องของโรเตอร์ภายใต้แรงกดดัน ขดลวดดังกล่าวมักลัดวงจรและไม่สามารถรวมความต้านทานเข้าไปได้ เฟสที่คดเคี้ยวของโรเตอร์นั้นทำขึ้นคล้ายกับขดลวดสเตเตอร์นั่นคือตัวนำนั้นเชื่อมต่อกันอย่างเหมาะสมทำให้เกิดระบบสามเฟส ขดลวดของสามเฟสเชื่อมต่อกันเป็นดาว จุดเริ่มต้นของขดลวดเหล่านี้เชื่อมต่อกับวงแหวนทองแดงหน้าสัมผัสสามวงที่ติดตั้งบนเพลาโรเตอร์ วงแหวนแยกออกจากกันและจากเพลาและหมุนด้วยโรเตอร์ เมื่อวงแหวนหมุน พื้นผิวของวงแหวนจะเลื่อนไปเหนือแปรงคาร์บอนหรือทองแดงที่ยึดไว้เหนือวงแหวน ขดลวดโรเตอร์สามารถปิดได้เมื่อมีแรงต้านหรือลัดวงจรโดยใช้แปรงด้านบน
มอเตอร์ที่มีโรเตอร์แบบกรงกระรอกนั้นใช้งานง่ายกว่าและเชื่อถือได้มากกว่า ราคาถูกกว่ามอเตอร์ที่มีเฟสโรเตอร์มาก อย่างไรก็ตาม มอเตอร์โรเตอร์แบบมีบาดแผลนั้นมีคุณสมบัติในการสตาร์ทและควบคุมได้ดีกว่า
ปัจจุบันมอเตอร์แบบอะซิงโครนัสส่วนใหญ่ใช้โรเตอร์กรงกระรอกและเฉพาะกับ ความจุขนาดใหญ่และกรณีพิเศษใช้เฟสที่คดเคี้ยวของโรเตอร์
มอเตอร์แบบอะซิงโครนัสผลิตพลังงานจากหลายสิบวัตต์ถึง 15,000 กิโลวัตต์ที่แรงดันไฟฟ้าที่ขดลวดสเตเตอร์สูงถึง 6 kV
มีช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์ซึ่งขนาดมีผลกระทบอย่างมากต่อประสิทธิภาพของเครื่องยนต์
นอกจากคุณสมบัติเชิงบวกที่สำคัญแล้ว - การออกแบบและการบำรุงรักษาที่เรียบง่าย ต้นทุนต่ำ - มอเตอร์แบบอะซิงโครนัสยังมีข้อเสียอยู่บ้าง ซึ่งปัจจัยด้านกำลังที่ค่อนข้างต่ำ (cos) นั้นสำคัญที่สุด ในมอเตอร์แบบอะซิงโครนัส cos ที่โหลดเต็มที่สามารถเข้าถึงค่า 0.85-0.9; เมื่อเครื่องยนต์มีภาระน้อย ค่าของมันจะลดลงอย่างรวดเร็วและเมื่อไม่มีการใช้งานจะเป็น 0.2-0.3
ปัจจัยด้านพลังงานต่ำของมอเตอร์เหนี่ยวนำเกิดจากการสิ้นเปลืองพลังงานสูง พลังงานปฏิกิริยาซึ่งจำเป็นต่อการกระตุ้นสนามแม่เหล็ก ฟลักซ์แม่เหล็กในมอเตอร์แบบอะซิงโครนัสจะพบกับช่องว่างอากาศระหว่างสเตเตอร์และโรเตอร์ระหว่างทาง ซึ่งจะเพิ่มความต้านทานแม่เหล็กในระดับที่สูงขึ้น และด้วยเหตุนี้ พลังงานที่มอเตอร์ใช้ไป
เพื่อเพิ่มตัวประกอบกำลังของมอเตอร์แบบอะซิงโครนัส พวกเขามักจะทำให้ช่องว่างอากาศเล็กที่สุดเท่าที่จะเป็นไปได้ ทำให้มอเตอร์ขนาดเล็ก (ประมาณ 2-5 กิโลวัตต์) เป็น 0.3 มม. ในเครื่องยนต์กำลังสูง ช่องว่างอากาศจะต้องเพิ่มขึ้นด้วยเหตุผลด้านการออกแบบ แต่ก็ยังไม่เกิน 2-2.5 มม.
เพลาโรเตอร์หมุนในตลับลูกปืนซึ่งติดตั้งอยู่ในแผงป้องกันด้านข้าง เรียกว่าแผ่นป้องกันตลับลูกปืน ส่วนใหญ่เป็นตลับลูกปืนกลิ้ง และบางครั้งใช้เฉพาะในเครื่องจักรกำลังสูงเท่านั้น
โล่แบริ่งถูกยึดเข้ากับตัวเรือนสเตเตอร์ แกนสเตเตอร์ถูกกดเข้าไปในตัวเรือน
วิศวกรรมความปลอดภัย
บล็อกและแผงสวิตช์บอร์ดที่แยกจากกัน รวมถึงตู้ไฟ ควรขนส่งโดยยานพาหนะในแนวตั้ง โดยยึดด้วยเหล็กค้ำยันและตัวหยุด เมื่อเคลื่อนย้ายตู้และโล่บนพื้นแข็งหรือพื้น จำเป็นต้องใช้ชะแลง
เมื่อยกของขึ้น สินค้าจะได้รับการประกันด้วยสลิง - โซ่สั้นหรือเชือกเหล็กที่มีตะขอและห่วง
คนงานอย่างน้อยสองคนควรติดตั้งโล่ ตู้ และกล่องยิงจรวดที่มีน้ำหนักมากกว่า 196N (20 กิโลกรัม) ที่สถานที่ติดตั้ง
เมื่อติดตั้งโครงสร้างที่ยึดติดกับผนัง เพดาน หรือพื้นด้วยซีเมนต์มอร์ตาร์ ห้ามถอดชิ้นส่วนรองรับจนกว่าปูนจะแข็งตัวเต็มที่
หากมีช่องเคเบิลด้านหลังหรือด้านหน้าของตัวป้องกัน ในระหว่างการติดตั้ง จำเป็นต้องปิดด้วยแผ่นหรือแผงที่มีความหนาอย่างน้อย 50 มม.
บล็อกที่ประกอบแล้วก่อนที่จะทำการยึดถาวรจะต้องยึดระหว่างตัวเองกับผนังที่ใกล้ที่สุดชั่วคราว
เมื่อทำการติดตั้งและปรับอุปกรณ์สวิตช์บอร์ดที่มีชิ้นส่วนเคลื่อนที่ที่ด้านหลังของแผง จำเป็นต้องใช้มาตรการเพื่อความปลอดภัยของผู้ที่ทำงานอยู่หลังแผงสวิตช์
การทำงานเกี่ยวกับการติดตั้งมอเตอร์ไฟฟ้าบนฐานรากควรทำในถุงมือ
มอเตอร์ไฟฟ้าที่มีน้ำหนักไม่เกิน 50 กิโลกรัมสามารถติดตั้งได้ด้วยตนเองบนฐานรากที่ต่ำ แต่ต้องมีคนงานไม่น้อยกว่าสองคน
ห้ามใช้นิ้วตรวจสอบตำแหน่งของรูในแผงป้องกันที่ประกอบหรือส่วนต่อพ่วง (เพื่อจุดประสงค์นี้ฉันใช้เทมเพลตพิเศษ)
ห้ามเคลื่อนย้ายและติดตั้งโล่โดยไม่ต้องใช้มาตรการเพื่อป้องกันไม่ให้พลิกคว่ำ
เมื่อขันข้อต่อแบบเกลียวของครึ่งข้อต่อให้แน่น ห้ามใช้เครื่องมืออื่นแทนประแจ ขันประแจให้ยาวขึ้นด้วยกุญแจอื่นๆ ส่วนไปป์ และอื่นๆ ใช้ประแจที่ชำรุดหรือประแจที่มีขนาดไม่ถูกต้อง
ก่อนการทดลองใช้มอเตอร์ไฟฟ้า จำเป็นต้องตรวจสอบ: การยึดฐานรากและส่วนประกอบอุปกรณ์อื่นๆ ไม่มีวัตถุแปลกปลอมภายในหรือใกล้อุปกรณ์ การปรากฏตัวของสายดินป้องกัน
วรรณกรรม.
1.Kitaev E.V. วิศวกรรมไฟฟ้าที่มีพื้นฐานทางอิเล็กทรอนิกส์อุตสาหกรรม - ม.: ม.ปลาย, 2523.
2. Tokarev B.F. เครื่องจักรไฟฟ้า - ม.: Energoanizdat, 1989.
3. Gusev N.N. , Meltzer B.N. อุปกรณ์และติดตั้งอุปกรณ์ไฟฟ้า.-ม.: มัธยมศึกษาตอนปลาย, 2522.
4. Dyakov V.I. การคำนวณทั่วไปสำหรับอุปกรณ์ไฟฟ้า: - ม.: บัณฑิตวิทยาลัย, 1991.
แบบแผนสำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัส
มีหลายรูปแบบสำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัส คุณสามารถเปิดเครื่องยนต์ได้โดยการสตาร์ทโดยตรง นั่นคือโดยใช้สวิตช์มีดหรือเซอร์กิตเบรกเกอร์ นอกจากนี้ มอเตอร์แบบอะซิงโครนัสยังสามารถเปิดได้โดยใช้อุปกรณ์สวิตชิ่งต่างๆ เช่น ผ่านคอนแทคเตอร์ สตาร์ทแม่เหล็ก และอื่นๆ
รูปที่ 1 แสดงระบบไฟฟ้าสำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัสผ่านสตาร์ทเตอร์แบบแม่เหล็ก เบรกเกอร์และปุ่มควบคุม
หลักการทำงานของวงจรมีดังนี้: เราเปิดเบรกเกอร์ QF ดังนั้นจึงใช้แรงดันไฟฟ้ากับวงจร เรากดปุ่ม SBC นั่นคือปุ่ม "เริ่ม" ในเวลาเดียวกัน ขดลวดสตาร์ทแม่เหล็ก KM ถูกขับเคลื่อน สตาร์ทแม่เหล็กเปิดอยู่ ในขณะที่หน้าสัมผัสกำลังปิดอยู่ หน้าสัมผัสปิดเสริมก็ปิดเช่นกัน โดยแบ่งปุ่ม "สตาร์ท" สามารถปล่อยปุ่มสตาร์ทได้ ทันทีที่หน้าสัมผัสกำลังของสตาร์ทเตอร์แม่เหล็กปิด มอเตอร์ M จะเปิดขึ้นและเริ่มทำงานในโหมดที่กำหนด
หากต้องการดับเครื่องยนต์ ให้กดปุ่ม SBT ปุ่ม STOP ในเวลาเดียวกัน เราเปิดวงจรคอยล์ของตัวสตาร์ทแม่เหล็ก KM KM ที่สตาร์ทแบบแม่เหล็กจะปิด หน้าสัมผัสกำลังจะเปิด ตัวช่วยเสริม KM จะเปิดขึ้น และในขณะเดียวกัน มอเตอร์ M จะปิดตัวลง
มีแบบแผนสำหรับการสตาร์ทมอเตอร์แบบอะซิงโครนัสซึ่งจำเป็นต้องย้อนกลับนั่นคือการเปลี่ยนทิศทางการหมุนของโรเตอร์มอเตอร์ รูปที่ 2 แสดงไดอะแกรมของการสลับบนมอเตอร์แบบอะซิงโครนัสโดยใช้สตาร์ทแม่เหล็กแบบย้อนกลับ
เราได้สิ่งที่ตรงกันข้ามโดยการเปลี่ยนลำดับเฟสบนมอเตอร์หรือสตาร์ทแม่เหล็ก
ซ่อมบำรุงมอเตอร์ไฟฟ้า.
การบำรุงรักษายกเครื่องเป็นสิ่งจำเป็นสำหรับเครื่องจักรไฟฟ้าที่ทำงานอยู่ ตามลำดับการผลิตและการบำรุงรักษาทางเทคนิค พวกเขาดูแลโหลดและการสั่นสะเทือนของมอเตอร์ไฟฟ้า อุณหภูมิของตลับลูกปืน ควบคุมอุณหภูมิของอากาศขาเข้าและขาออกในระบบระบายอากาศแบบปิด ตรวจสอบว่าไม่มีเสียงและประกายไฟผิดปกติภายใต้แปรง ,ดูแลลูกปืนและควบคุมปริมาณสารหล่อลื่น การดำเนินการตามรายการจะดำเนินการโดยเจ้าหน้าที่หน้าที่ของการประชุมเชิงปฏิบัติการ พนักงานคนเดิมทุกเดือนทำการตรวจสอบภายนอกและทำความสะอาดมอเตอร์ไฟฟ้าและอุปกรณ์จากฝุ่นและสิ่งสกปรก
การตรวจสอบมอเตอร์ไฟฟ้าเป็นระยะ ๆ ดำเนินการตามกำหนดการที่กำหนดโดยหัวหน้าวิศวกรไฟฟ้า วัตถุประสงค์ของการตรวจสอบคือเพื่อกำหนดเงื่อนไขทางเทคนิคของมอเตอร์ไฟฟ้าและเพื่อระบุขอบเขตของงานที่ต้องทำในระหว่างการซ่อมแซมครั้งต่อไป นอกจากนี้ ในระหว่างการตรวจสอบ แบริ่ง ตัวสะสม แหวน แปรง และการซ่อมแซมเล็กน้อยจะดำเนินการโดยไม่ต้องแยกชิ้นส่วนเครื่องจักร
การซ่อมแซมเล็กน้อยและการกำจัดการทำงานผิดปกติเล็กน้อยของมอเตอร์ไฟฟ้าจะดำเนินการในช่วงพักงานตามกำหนดเวลา อุปกรณ์เทคโนโลยี(ในช่วงพักกลางวัน, กะที่ไม่ทำงาน, วันหยุดสุดสัปดาห์) งานเหล่านี้ดำเนินการโดยเจ้าหน้าที่ปฏิบัติงานและบำรุงรักษาของเวิร์กช็อป รวมถึงการขันสกรูและข้อต่อแบบเกลียวให้แน่น การกระชับข้อต่อสัมผัสที่ถอดออกได้และสลักเกลียวฐานราก การปรับอุปกรณ์ป้องกันและควบคุม การปรับตำแหน่งของทางขวาง การบำรุงรักษาตัวสะสม แหวนและอุปกรณ์แปรง
นอกจากงานข้างต้นแล้ว พนักงานของโรงงานที่ปฏิบัติหน้าที่ยังคอยตรวจสอบสภาพของฉนวนและความสามารถในการซ่อมบำรุงของอุปกรณ์กราวด์ของไดรฟ์ไฟฟ้าอย่างต่อเนื่อง ดูแลการปฏิบัติตามกฎ การดำเนินการทางเทคนิคของมอเตอร์ไฟฟ้าและกฎความปลอดภัยทางไฟฟ้าสำหรับแรงงานของกลไกการผลิตและบุคลากรทางเทคโนโลยีของการประชุมเชิงปฏิบัติการและยังมีส่วนร่วมในการทดสอบการยอมรับของมอเตอร์ไฟฟ้าและระบบควบคุมและป้องกันหลังการติดตั้งซ่อมแซมและปรับแต่ง
ก่อนนำเครื่องไฟฟ้าไปใช้งาน ช่างไฟฟ้าที่ปฏิบัติหน้าที่ต้องตรวจสอบให้แน่ใจว่าไม่มีวัตถุแปลกปลอมอยู่บนเครื่องหรือภายในเครื่อง ตรวจสอบสภาพของวงแหวนสัมผัสหรือตัวสะสม ตำแหน่งของที่จับลิโน่สตาร์ทซึ่งต้องอยู่ใน ตำแหน่ง "เริ่มต้น" ในเครื่องจักรขนาดเล็ก โรเตอร์จะหมุนด้วยมือ อุปกรณ์ป้องกันการเริ่มต้นและหยุดอัตโนมัติที่มีอยู่ในวงจรบล็อกและควบคุมได้รับการตรวจสอบและปรับเปลี่ยนตามคำแนะนำที่ได้รับอนุมัติจากวิศวกรไฟฟ้าหลักขององค์กร
การเตรียมเครื่องจักรไฟฟ้าสำหรับการสตาร์ทหลังจากการซ่อมแซมดำเนินการโดยห้องปฏิบัติการไฟฟ้าของโรงงานโดยมีช่างไฟฟ้าประจำการอยู่ หากมีตัวบ่งชี้ระดับน้ำมันในตลับลูกปืนบนตลับลูกปืนของเครื่องไฟฟ้า ให้ตรวจสอบการมีอยู่และระดับน้ำมันปกติ
หลังจากสตาร์ทเครื่องด้วยไฟฟ้าแล้ว จะมีการตรวจสอบความร้อนของตัวเครื่องและตลับลูกปืน การสั่น เสียงและเสียงฮัม ประกายไฟที่ตัวสะสม การเต้นของสายพานขับ หรือการประกบกับกลไก
การหยุดฉุกเฉินของเครื่องจักรไฟฟ้าที่กำลังทำงานอยู่จะดำเนินการในกรณีต่อไปนี้: ในกรณีที่เกิดอุบัติเหตุ เมื่อจำเป็นต้องหยุดเครื่อง เมื่อควันหรือไฟปรากฏขึ้นจากเครื่องหรือบัลลาสต์ เมื่อกลไกขับเคลื่อนพัง เมื่อมี คือการสั่นสะเทือนที่รุนแรงซึ่งคุกคามความสมบูรณ์ของเครื่องเมื่อเครื่องได้รับความร้อนมากเกินไปโดยมีความเร็วในการหมุนลดลงอย่างเห็นได้ชัด
ความผิดปกติของมอเตอร์ไฟฟ้า
ความผิดปกติของมอเตอร์ไฟฟ้าเกิดขึ้นจากการสึกหรอของชิ้นส่วนและอายุของวัสดุ ตลอดจนการละเมิดกฎการใช้งานทางเทคนิค สาเหตุของการทำงานผิดพลาดและความเสียหายต่อมอเตอร์ไฟฟ้านั้นแตกต่างกัน บ่อยครั้งที่การทำงานผิดพลาดแบบเดียวกันนั้นเกิดจากการกระทำของสาเหตุต่างๆ และบางครั้งเกิดจากการกระทำร่วมกัน ความสำเร็จของการซ่อมแซมส่วนใหญ่ขึ้นอยู่กับการพิจารณาสาเหตุของการทำงานผิดพลาดทั้งหมดและความเสียหายต่อมอเตอร์ไฟฟ้าที่เข้าสู่การซ่อมแซมอย่างถูกต้อง
ความเสียหายต่อมอเตอร์ไฟฟ้าตามสถานที่เกิดและลักษณะของแหล่งกำเนิดแบ่งออกเป็นไฟฟ้าและเครื่องกล เป็นไฟฟ้า
รวมถึงความเสียหายหรือส่วนที่เป็นสื่อกระแสไฟฟ้าของขดลวด ตัวสะสม สลิปริง และแผ่นแกน ความเสียหายทางกลถือเป็นการอ่อนตัวลงของการยึดเกลียวเชื่อมต่อ, ความพอดี, การละเมิดรูปร่างและพื้นผิวของชิ้นส่วน, การบิดเบี้ยวและการแตกหัก ความเสียหายมักจะมีสัญญาณชัดเจนหรือวัดได้ง่ายโดยการวัด
ความผิดปกติของมอเตอร์ไฟฟ้าและสาเหตุที่เป็นไปได้ของการเกิดขึ้น
| อาการ |
สาเหตุของความผิดปกติ |
วิธีการซ่อม |
| มอเตอร์ไฟฟ้า เครื่องยนต์เมื่อเชื่อมต่อกับเครือข่ายไม่พัฒนาความเร็วปกติทำให้เกิดเสียงผิดปกติและเมื่อหมุนเพลาด้วยมือก็ทำงานไม่สม่ำเสมอ โรเตอร์มอเตอร์ไม่หมุน มีเสียงฮัมมาก ร้อนเร็วถึงอุณหภูมิเกินที่อนุญาต มอเตอร์ส่งเสียงดังมาก (โดยเฉพาะตอนสตาร์ท) โรเตอร์จะหมุนช้าและวิ่งได้เสถียร มอเตอร์ทำงานอย่างเสถียรที่โหลดที่กำหนดบนเพลาด้วยความเร็วรอบการหมุนน้อยกว่าที่กำหนด กระแสในหนึ่งเฟสสเตเตอร์จะเพิ่มขึ้น เมื่อมอเตอร์ไฟฟ้าทำงาน ไม่ทำงานความร้อนสูงเกินไปในท้องถิ่นของเหล็กที่ใช้งานสเตเตอร์นั้นสังเกตได้ ความร้อนสูงเกินไปของขดลวดสเตเตอร์ในบางสถานที่ที่มีกระแสไม่สมดุลในระยะ เครื่องยนต์ฮัมและไม่พัฒนา พิกัดแรงบิด ความร้อนสูงเกินไปสม่ำเสมอของมอเตอร์ไฟฟ้าทั้งหมด ความร้อนสูงเกินไปของตลับลูกปืนธรรมดาที่มีการหล่อลื่นวงแหวน แบริ่งลูกกลิ้งร้อนเกินไปพร้อมกับเสียงผิดปกติ เคาะในแบริ่ง เคาะในแบริ่ง เพิ่มการสั่นสะเทือนระหว่างการทำงาน มอเตอร์ไฟฟ้า กระดองเครื่องไม่หมุนภายใต้ภาระ หากเพลาหมุนด้วยแรงจากภายนอกเครื่องยนต์จะเข้าสู่ "ระยะห่าง" ความเร็วของกระดองน้อยกว่าหรือมากกว่าปกติที่ค่าปกติของแรงดันไฟหลักและกระแสกระตุ้น แปรงของป้ายหนึ่งเป็นประกายมากกว่าแปรงของอีกป้ายหนึ่ง แปรงเป็นประกาย; การทำให้ดำคล้ำของแผ่นสะสมซึ่งอยู่ห่างจากกันจะเกิดขึ้น หลังจากทำความสะอาด เพลทเดียวกันจะเปลี่ยนเป็นสีดำ ทุกแผ่นสะสมที่สองหรือสามเปลี่ยนเป็นสีดำ ด้วยการทำความร้อนตามปกติของเครื่องยนต์และอุปกรณ์แปรงที่บำรุงรักษาได้อย่างสมบูรณ์แบบและพื้นผิวของตัวสับเปลี่ยน แปรงจะจุดประกาย เพิ่มประกายไฟของแปรงจากการสั่นสะเทือน, ความร้อนสูงเกินไปของสับเปลี่ยนและแปรง, มืดของสับเปลี่ยนส่วนใหญ่ เมื่อกระดองมอเตอร์หมุนไปในทิศทางที่ต่างกัน แปรงจะจุดประกายด้วยความเข้มต่างกัน ประกายไฟที่เพิ่มขึ้น แปรงบนตัวสะสม |
ตัวแปร ความล้มเหลวของเฟสเป็นไปได้เมื่อเชื่อมต่อขดลวดสเตเตอร์กับดาวหรือสองเฟสเมื่อเชื่อมต่อกับเดลต้า ความล้มเหลวของเฟสคดเคี้ยว ตัวแบ่งเฟสโรเตอร์ แบ่งสเตเตอร์เป็นเฟสเดียวเมื่อต่อขดลวดด้วยรูปสามเหลี่ยม แผ่นของแกนสเตเตอร์ปิดติดกันเนื่องจากความเสียหายต่อฉนวนของแผ่นระหว่างแผ่นหรือความเหนื่อยหน่ายของฟันหากขดลวดเสียหาย เปิดไฟฟ้าลัดวงจรหนึ่งเฟสในขดลวดสเตเตอร์ ไฟฟ้าลัดวงจรแบบเฟสต่อเฟสในขดลวดสเตเตอร์ พัดลมเสีย (ระบบระบายอากาศ) การดึงดูดด้านเดียวของโรเตอร์เนื่องจากการสึกหรอของไลเนอร์มากเกินไป ความพอดีของเพลากับซับไม่ดี การปนเปื้อนสารหล่อลื่น การสึกหรอมากเกินไปขององค์ประกอบและรางกลิ้ง การจัดตำแหน่งเพลาที่ไม่ถูกต้องในตัวเครื่อง อายไลเนอร์ขนาดใหญ่ การทำลายรางหรือองค์ประกอบกลิ้ง ความไม่สมดุลของโรเตอร์โดยรอกหรือข้อต่อ ศูนย์กลางของเพลาของหน่วยไม่ถูกต้อง ข้อต่อเบ้ครึ่ง ถาวร เปิดหรือสัมผัสไม่ดีในวงจรกระตุ้น สั้นหรือ อินเตอร์เทิร์นลัดวงจรในขดลวดกระตุ้นอิสระ แปรงจะเปลี่ยนจากตำแหน่งที่เป็นกลางตามลำดับในทิศทางของการหมุนหรือกับทิศทางการหมุนของเพลา ระยะห่างระหว่างแถวของแปรงตามแนวเส้นรอบวงของตัวสะสมไม่เหมือนกัน ลัดวงจรในขดลวดของเสาหลักหรือเสาเพิ่มเติม ติดต่อไม่ดีหรือ ไฟฟ้าลัดวงจรในขดลวดกระดอง; แตกในขดลวดที่ติดอยู่กับแผ่นดำคล้ำ ตัวกดสะสมหลวมหรือรางฉนวนเป็นแร่ไมคาไนต์ การสึกหรอของท่อร่วมที่ยอมรับไม่ได้ รางฉนวนสะสมยื่นออกมา; นักสะสม "เต้น" แปรงปิดศูนย์ แปรงไม่เพียงพอกับตัวสะสม ข้อบกพร่องของพื้นผิวการทำงานของแปรง แรงกดของแปรงไม่เท่ากันบนตัวสะสม การติดขัดของแปรงในที่ใส่แปรง |
จุดที่น่าจะเสียหายมากที่สุดคือการเชื่อมต่อระหว่างคอยล์หรือออกซิเดชันของพื้นผิวสัมผัสของวงแหวนปิด (สำหรับมอเตอร์ที่มีเฟสโรเตอร์) พวกเขาซ่อมแซมการเชื่อมต่อ ทำความสะอาดหน้าสัมผัส ซ่อมแซมขดลวด ขจัดครีบโดยการประมวลผลจุดปิดด้วยไฟล์ที่มีคม แยกแผ่นงานและเคลือบเงา ในกรณีที่แผ่นกระดาษหมดแรงอย่างรุนแรง ให้ตัดส่วนที่เสียหายออก วางกระดาษแข็งบางๆ ระหว่างแผ่นกับน้ำยาเคลือบเงา ค้นหาตำแหน่งของความเสียหายที่คดเคี้ยวและกำจัดไฟฟ้าลัดวงจร หากจำเป็น ให้กรอส่วนที่เสียหายของขดลวด ถอดฝาครอบป้องกันและซ่อมพัดลม โหลดตลับลูกปืนธรรมดา ถอดจารบีเก่า ฟลัชแบริ่ง และเติมด้วยจาระบีใหม่ เปลี่ยนลูกปืนล้อ. ตรวจสอบการติดตั้งตลับลูกปืนและการจัดตำแหน่งเครื่องกับตัวเครื่อง บีบแบริ่ง เปลี่ยนลูกปืน ปรับสมดุลโรเตอร์ มู่เล่ย์ หรือส่วนคัปปลิ้ง เพื่อจัดตำแหน่งเครื่องยนต์และเครื่องจักร ถอดและติดตั้งข้อต่อครึ่ง หาจุดแตกหักหรือสัมผัสไม่ดีและแก้ไขความเสียหาย ส่วนใหญ่มักจะเกิดความผิดปกติในตัวควบคุมการกระตุ้น ตั้งค่าแปรงสับเปลี่ยนให้เป็นกลาง การแตกมักเกิดขึ้นในขดลวดที่อยู่ระหว่างแผ่นสะสมที่ดำคล้ำ ค้นหาตำแหน่งของความเสียหายและการซ่อมแซม ตรวจสอบการบัดกรีของการเชื่อมต่อทั้งหมดระหว่างขดลวดกระดองกับเพลตสะสมที่ดำคล้ำ ตรวจพบข้อผิดพลาดในการเชื่อมต่อ - บัดกรี ขันแผ่นสะสมให้แน่นแล้วบดพื้นผิว เครื่องยนต์ได้รับการยกเครื่องหรือเปลี่ยนใหม่ หมุนและบดท่อร่วม ตรวจสอบตำแหน่งของแปรงและติดตั้งตามเครื่องหมายโรงงานที่อยู่บนแนวขวาง ตรวจสอบและถ้าจำเป็น ให้ย่นสปริงแรงดันของที่ยึดแปรงหรือเปลี่ยนอันใหม่ ทรายพื้นผิวแปรง ติดตั้งแปรงตามคำแนะนำของผู้ผลิตโดยใช้แปรงยี่ห้อเดียวกัน |
ความผิดปกติมักจะเกิดขึ้นได้ด้วยสัญญาณทางอ้อมเท่านั้น ในกรณีนี้ จำเป็นต้องทำการวัดไม่เพียงเท่านั้น แต่ยังต้องเปรียบเทียบข้อเท็จจริงที่ค้นพบกับสิ่งที่ทราบจากประสบการณ์และหาข้อสรุปที่เหมาะสม
การทดสอบก่อนการซ่อมแซม สำหรับมอเตอร์ไฟฟ้าที่เข้ามารับการซ่อมแซม หากเป็นไปได้ ควรทำการทดสอบก่อนการซ่อม
ขอบเขตของการทดสอบจะถูกกำหนดในแต่ละกรณีขึ้นอยู่กับประเภทของการซ่อมแซม ผลการวิเคราะห์แผนที่การตรวจสอบ และสภาพภายนอกของมอเตอร์ไฟฟ้า การทำงานกับการระบุสาระสำคัญของความผิดปกติของเครื่องเรียกว่าการตรวจจับข้อบกพร่อง ก่อนการทดสอบ มอเตอร์ไฟฟ้าได้รับการจัดเตรียมสำหรับการทำงานโดยปฏิบัติตามข้อกำหนดทั้งหมดของเอกสารทางเทคนิค: วัดขนาดของช่องว่างในตลับลูกปืนและช่องว่างอากาศ ตรวจสอบส่วนประกอบและชิ้นส่วนที่เข้าถึงได้ และความเป็นไปได้ในการใช้งาน ในระหว่างการทดสอบจะได้รับการประเมิน ชิ้นส่วนที่ไม่เหมาะสม ถ้าเป็นไปได้ จะถูกแทนที่ด้วยชิ้นส่วนที่ใช้งานได้ (โดยไม่ต้องถอดประกอบ)
ในมอเตอร์แบบอะซิงโครนัสที่ไม่ได้ใช้งาน จะมีการวัดกระแสที่ไม่มีโหลด ตรวจสอบความสมมาตร และพารามิเตอร์ทั้งหมดที่ต้องควบคุมระหว่างการทำงานจะได้รับการประเมินด้วยสายตาหรือด้วยเครื่องมือช่วย
ในมอเตอร์ไฟฟ้าที่มีเฟสโรเตอร์และมอเตอร์กระแสตรง การทำงานของแหวนสลิปและตัวสะสมจะถูกประเมิน อุปกรณ์แปรง. การโหลดมอเตอร์ไฟฟ้าในระดับที่ยอมรับได้ ประเมินผลกระทบของโหลดต่อการทำงานของส่วนประกอบหลัก ควบคุมความสม่ำเสมอของการให้ความร้อนของชิ้นส่วนที่เข้าถึงได้ การสั่นสะเทือน กำหนดการทำงานผิดปกติและระบุสาเหตุที่เป็นไปได้
สัญญาณทั่วไปและสาเหตุของการทำงานผิดปกติของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสที่มีพารามิเตอร์ระบุของเครือข่ายอุปทานและการรวมที่ถูกต้องของขดลวดมอเตอร์
ประเภทและปริมาณการซ่อม
ตามกฎสำหรับการใช้งานทางเทคนิค ระบบการบำรุงรักษาเชิงป้องกันของอุปกรณ์ไฟฟ้า (PPREO) จัดให้มีการซ่อมแซมสองประเภท: กระแสไฟและการยกเครื่อง
การซ่อมบำรุง. มีการดำเนินการเป็นระยะ (กำหนดโดยหัวหน้าวิศวกรไฟฟ้า) สำหรับมอเตอร์ไฟฟ้าทั้งหมดที่ทำงานอยู่ ขอบเขตงานทั่วไปสำหรับการซ่อมแซมในปัจจุบันรวมถึงงานประเภทต่อไปนี้: การตรวจสอบภายนอกของมอเตอร์ไฟฟ้า การล้างและการหล่อลื่นตลับลูกปืน และหากจำเป็น การเปลี่ยนตลับลูกปืนกลิ้ง การตรวจสอบและซ่อมแซมพัดลม การทำความสะอาดอุปกรณ์ระบายอากาศและท่อ การทำความสะอาดและ เป่าขดลวดลมอัด, วงแหวนสลิป, ตัวสะสมอุปกรณ์แปรง, การตรวจสอบสภาพการยึดของขดลวดด้านหน้า, วงแหวนสลิปการเจียรและตัวสะสม, การปรับอุปกรณ์แปรง, การเช็ดและเปลี่ยนแปรง, การขับตัวสะสม, การตรวจสอบและขันสกรูเกลียวทั้งหมดให้แน่น , ตรวจสอบการเชื่อมต่อการป้องกัน, ดำเนินการทดสอบเชิงป้องกัน
การซ่อมแซมทุน ดำเนินการในเงื่อนไขของร้านซ่อมไฟฟ้า (ERTS) หรือองค์กรซ่อมแซมเฉพาะทาง (SRP) ขอบเขตของการยกเครื่องรวมถึงงานที่ได้รับจากการซ่อมแซมในปัจจุบัน นอกจากนี้ยังรวมถึงงานประเภทต่อไปนี้: การถอดประกอบมอเตอร์ไฟฟ้าโดยสมบูรณ์, การตรวจสอบส่วนประกอบและชิ้นส่วนทั้งหมดและข้อบกพร่อง, การซ่อมแซมเฟรมและแบริ่งของโล่, วงจรแม่เหล็กของโรเตอร์และสเตเตอร์, เพลา, พัดลม, โรเตอร์, ตัวสะสม, การกำจัดข้อบกพร่องในท้องถิ่นในฉนวนของขดลวดและการเชื่อมต่อ ดำเนินการทดสอบหลังการซ่อมแซม
ความถี่ของการยกเครื่องมอเตอร์ไฟฟ้าไม่ได้ถูกกำหนดโดยกฎสำหรับการดำเนินการทางเทคนิค กำหนดโดยผู้รับผิดชอบสิ่งอำนวยความสะดวกทางไฟฟ้าขององค์กรโดยพิจารณาจากระยะเวลารวมของการทำงานของมอเตอร์ไฟฟ้าและสภาพท้องถิ่นสำหรับการทำงาน
หลังการขนส่ง สำหรับการติดตั้งมอเตอร์ไฟฟ้าบนฐานราก งานเพิ่มเติมต่อไปนี้จะดำเนินการ: การจัดตำแหน่งของมอเตอร์ไฟฟ้า การจัดตำแหน่งและการจัดตำแหน่งเพลาของมอเตอร์ไฟฟ้าและตัวเครื่อง การยึด การเทฐาน แนะนำให้เปลี่ยนขดลวดบางส่วนในกรณีที่เกิดความเสียหายกับขดลวดชั้นเดียวหรือขดลวดแบบแท่ง (ไม่แนะนำให้เปลี่ยนขดลวดสเตเตอร์แบบสองชั้นบางส่วนเนื่องจากฉนวนของขดลวดที่ใช้งานได้เสียหาย)
สายไฟที่ถอดออกจากมอเตอร์ไฟฟ้าที่เสียหายระหว่างระยะเวลาการซ่อมแซมจะถูกนำมาใช้ซ้ำ ในกรณีนี้จำเป็นต้องคืนค่าพารามิเตอร์ทางไฟฟ้าและทางกลของขดลวดให้เป็นค่าดั้งเดิม ในการทำความสะอาดสายไฟจากฉนวนเก่านั้น จะใช้การหลอมในเตาเผา และการแยกทางกลของฉนวนที่เหลือออกจากสายไฟนั้นทำได้โดยการดึงผ่านคลิปหนีบไม้หรือ textolite หลังจากยืดแล้ว สายไฟจะถูกหุ้มด้วยฉนวนใหม่บนเครื่อง
เมื่อซ่อมขดลวดสเตเตอร์จากขดลวดแข็ง สายทองแดงส่วนสี่เหลี่ยมถูกนำมาใช้ซ้ำ ฉนวนจะกลับคืนมาโดยการพันเทปด้วยการทับซ้อนกัน โดยทับซ้อนกัน 1:2 ของความกว้างของเทปฉนวน การเปลี่ยนตัวสะสมจะดำเนินการเฉพาะในกรณีที่เกิดความเสียหายอย่างมีนัยสำคัญ (แผ่นสะสมห้าแผ่นขึ้นไป) ที่มีการพังทลายและความเหนื่อยหน่ายของฉนวน
นอกจากนี้ นักสะสมอาจต้องเปลี่ยนโดยรวม หากระยะขอบของขนาดของแผ่นสะสมที่สูงไม่รับประกันการสึกหรอตามธรรมชาติโดยไม่ลดขนาดนี้ให้ต่ำกว่าขีดจำกัดที่อนุญาตในช่วงเวลาก่อนการยกเครื่องครั้งใหญ่ครั้งถัดไป
การทำให้แห้ง การทำให้ชุ่ม และการทดสอบขดลวด การผลิตขดลวดของสเตเตอร์ โรเตอร์ และอาร์เมเจอร์จะต้องทำให้แห้งในเตาอบพิเศษและห้องอบแห้งที่อุณหภูมิ 105-120 องศาเซลเซียส ด้วยความช่วยเหลือของการทำให้แห้งความชื้นจะถูกลบออกจากวัสดุฉนวนดูดความชื้น (กระดาษแข็ง, เทปผ้าฝ้าย) ซึ่งป้องกันการซึมลึกของสารเคลือบเงาที่ชุบเข้าไปในรูพรุนของชิ้นส่วนที่เป็นฉนวนในระหว่างการชุบของขดลวด
การอบแห้งจะดำเนินการในรังสีอินฟราเรดของหลอดไฟฟ้าพิเศษหรือใช้ลมร้อนในห้องอบแห้ง หลังจากการอบแห้ง ขดลวดเคลือบด้วยน้ำยาเคลือบเงา BT-987, BT-95, BT-99, GF-95 ในอ่างชุบพิเศษ สถานที่นี้มีการติดตั้งระบบระบายอากาศและไอเสีย การชุบจะดำเนินการในอ่างที่เติมสารเคลือบเงาและติดตั้งระบบทำความร้อนเพื่อให้น้ำยาเคลือบเงาซึมเข้าไปในฉนวนของขดลวดได้ดียิ่งขึ้น
เมื่อเวลาผ่านไป สารเคลือบเงาในอ่างจะมีความหนืดและหนาขึ้นเนื่องจากการระเหยของตัวทำละลายวานิช เป็นผลให้ความสามารถในการเจาะเข้าไปในฉนวนของสายไฟที่คดเคี้ยวลดลงอย่างมากโดยเฉพาะอย่างยิ่งในกรณีที่สายไฟที่คดเคี้ยวแน่นเข้าไปในร่องของแกน ดังนั้นเมื่อชุบขดลวด ความหนาแน่นและความหนืดของน้ำยาเคลือบเงาในอ่างจะถูกตรวจสอบอย่างต่อเนื่องและเติมตัวทำละลายเป็นระยะ ขดลวดชุบได้สูงสุดสามครั้งขึ้นอยู่กับสภาพการใช้งาน
เพื่อประหยัดน้ำยาเคลือบเงาซึ่งถูกใช้ไปเนื่องจากการยึดติดกับผนังของโครงสเตเตอร์นั้นใช้วิธีอื่นในการชุบขดลวดโดยใช้อุปกรณ์พิเศษ มีการติดตั้งสเตเตอร์ที่มีขดลวดพร้อมสำหรับการชุบบนฝาถังพิเศษที่มีการเคลือบเงาโดยก่อนหน้านี้ได้ปิดกล่องเอาท์พุตสเตเตอร์ด้วยปลั๊ก ตราประทับอยู่ระหว่างปลายสเตเตอร์และฝาครอบถัง ตรงกลางฝามีท่อซึ่งปลายล่างซึ่งอยู่ต่ำกว่าระดับของสารเคลือบเงาในถัง
ในการทำให้ขดลวดสเตเตอร์ชุ่ม อากาศอัดจะถูกส่งไปยังถังผ่านหัวฉีดที่แรงดัน 0.45 - 0.5 MPa ด้วยความช่วยเหลือซึ่งระดับสารเคลือบเงาจะเพิ่มขึ้นเพื่อเติมเต็มขดลวดทั้งหมด แต่อยู่ใต้ขอบบนของเตียงสเตเตอร์ เมื่อสิ้นสุดการชุบ ปิดการจ่ายอากาศและกดสเตเตอร์ค้างไว้ประมาณ 40 นาที (เพื่อระบายสารเคลือบเงาที่เหลือลงในถัง) ถอดปลั๊กออกจากกล่องขั้วต่อ หลังจากนั้น สเตเตอร์จะถูกส่งไปยังห้องอบแห้ง
อุปกรณ์เดียวกันนี้ใช้เพื่อชุบขดลวดสเตเตอร์ภายใต้แรงดัน ความจำเป็นนี้เกิดขึ้นในกรณีที่สายไฟแน่นมากในร่องสเตเตอร์และในระหว่างการชุบตามปกติ (โดยไม่มีแรงดันวานิช) สารเคลือบเงาจะไม่เจาะเข้าไปในรูพรุนทั้งหมดของฉนวนของการหมุน กระบวนการชุบด้วยแรงดันมีดังนี้ ติดตั้งสเตเตอร์เหมือนในกรณีแรก แต่ปิดด้วยฝาปิดด้านบน อากาศอัดถูกส่งไปยังถังและกระบอกสูบซึ่งกดฝาครอบกับส่วนท้ายของโครงสเตเตอร์ผ่านปะเก็นซีลที่ติดตั้ง แกนหมุนที่ติดตั้งอยู่บนเสาและข้อต่อเกลียวของฝาปิดกับกระบอกสูบทำให้สามารถใช้อุปกรณ์นี้ในการชุบขดลวดสเตเตอร์ที่มีความสูงต่างๆ
น้ำยาเคลือบเงาจะถูกส่งไปยังถังจากภาชนะที่อยู่ในห้องอื่นที่ไม่ติดไฟ แล็คเกอร์และตัวทำละลายเป็นพิษและติดไฟได้ และตามกฎการคุ้มครองแรงงาน ควรใช้แว่นตา ถุงมือ ผ้ากันเปื้อนยางในห้องที่มีการระบายอากาศและไอเสีย
หลังจากการชุบแล้ว ขดลวดของเครื่องจะถูกทำให้แห้งในห้องพิเศษ อากาศที่จ่ายไปยังห้องเพาะเลี้ยงโดยการหมุนเวียนแบบบังคับจะถูกทำให้ร้อนด้วยเครื่องทำความร้อนไฟฟ้า เครื่องทำความร้อนด้วยแก๊สหรือไอน้ำ ในระหว่างการทำให้ขดลวดแห้ง อุณหภูมิในห้องอบแห้งและอุณหภูมิของอากาศที่ออกจากห้องจะถูกตรวจสอบอย่างต่อเนื่อง ที่จุดเริ่มต้นของการทำให้ขดลวดแห้ง อุณหภูมิในห้องจะต่ำกว่าเล็กน้อย (100-110 วินาที) ที่อุณหภูมินี้ตัวทำละลายจะถูกลบออกจากฉนวนที่คดเคี้ยวและระยะเวลาการอบแห้งครั้งที่สองจะเริ่มขึ้น - การอบฟิล์มเคลือบเงา ในเวลานี้ อุณหภูมิการทำให้แห้งของขดลวดเพิ่มขึ้นเป็น 140C เป็นเวลา 5-6 ชั่วโมง (สำหรับฉนวนคลาส A) หากหลังจากการอบแห้งหลายชั่วโมง ความต้านทานของฉนวนของขดลวดยังคงไม่เพียงพอ การทำความร้อนจะถูกปิดและปล่อยให้ขดลวดเย็นลงที่อุณหภูมิสูงกว่าอุณหภูมิแวดล้อม 10-15 ° C หลังจากนั้นให้ความร้อน เปิดขึ้นอีกครั้งและกระบวนการทำให้แห้งจะดำเนินต่อไป
กระบวนการของการชุบและการอบแห้งของขดลวดที่สถานประกอบการซ่อมไฟฟ้าถูกรวมเข้าด้วยกันและตามกฎแล้วจะใช้เครื่องจักร
ในกระบวนการผลิตและซ่อมแซมขดลวดของเครื่องจักร จะทำการทดสอบฉนวนของขดลวดที่จำเป็น แรงดันทดสอบควรเป็นแบบที่ในระหว่างการทดสอบพบว่าส่วนที่ชำรุดของฉนวนถูกเปิดเผยและฉนวนของขดลวดที่ดีจะไม่เสียหาย ดังนั้นสำหรับขดลวดที่มีแรงดัน 400V ทดสอบแรงดันไม่ถอดออกจากร่องของขดลวดเป็นเวลา 1 นาทีควรเท่ากับ 1600V และหลังจากเชื่อมต่อวงจรด้วยการซ่อมแซมขดลวดบางส่วน - 1300V
ความต้านทานฉนวนของขดลวดของมอเตอร์ไฟฟ้าที่มีแรงดันไฟฟ้า 500 โวลต์หลังจากการชุบและการอบแห้งต้องมีอย่างน้อย 3 MΩ สำหรับขดลวดสเตเตอร์ และ 2 MΩ สำหรับขดลวดโรเตอร์หลังจากการกรอกลับทั้งหมด และ 1 MΩ และ 0.5 MΩ ตามลำดับ หลังจากการกรอกลับบางส่วน . ค่าความต้านทานของฉนวนที่คดเคี้ยวเหล่านี้ได้รับการแนะนำโดยพิจารณาจากการซ่อมแซมและการทำงานของเครื่องจักรไฟฟ้าที่ได้รับการซ่อมแซม
งานติดตั้งมอเตอร์ไฟฟ้า.
หลังจากทดสอบมอเตอร์ไฟฟ้าแล้ว ความเป็นไปได้ของการเปิดเครื่องโดยไม่ทำให้แห้งจะถูกกำหนด มอเตอร์ไฟฟ้าที่มีแรงดันไฟฟ้าสูงถึง 1,000V จะเปิดขึ้นโดยไม่ทำให้แห้ง หากความต้านทานของฉนวนของขดลวดที่อุณหภูมิ 10C ถึง 30C อย่างน้อย 0.5 Mohm หากไม่เป็นไปตามเงื่อนไขเหล่านี้ มอเตอร์จะต้องถูกทำให้แห้ง
วิธีการอบแห้งเครื่องจักรไฟฟ้า วิธีการทำให้แห้งโดยใช้ความร้อนจากภายนอกใช้สำหรับเครื่องที่มีความชื้นสูง เครื่องวางอยู่ในห้องฉนวนความร้อนที่เป่าด้วยลมร้อนจากเครื่องเป่าลม
การอบแห้งด้วยอินฟราเรดดำเนินการโดยใช้ตัวปล่อยความร้อนซึ่งเป็นโคมไฟกระจกเงาที่มีกำลังไฟ 250 หรือ 500 วัตต์ ซึ่งอยู่ห่างจากพื้นผิวที่ร้อน 200-400 มม. วางโคมไฟในระยะ 200-300 มม. จากกันในรูปแบบกระดานหมากรุก อุณหภูมิจะถูกควบคุมโดยการเปิดและปิดหลอดไฟบางดวง
วิธีการทำให้แห้งและการทำให้แห้งด้วยอินฟราเรดโดยใช้ความร้อนจากภายนอกใช้สำหรับเครื่องจักรไฟฟ้าทุกชนิด แรงดันไฟจ่ายต่ำ โรเตอร์ของเครื่อง AC เมื่อทำให้แห้งจาก แหล่งภายนอกช้าลงหน่อย. กระแสเปิดและปิดโดยการเปลี่ยนแปลงความต้านทานของลิโน่อย่างราบรื่น
โหมดการทำให้แห้ง ก่อนการอบแห้ง เครื่องจะได้รับการทำความสะอาดอย่างทั่วถึงและเป่าด้วยลมอัด ตัวเครื่องมีการต่อสายดินอย่างแน่นหนา กำลังดำเนินมาตรการเพื่อลดการสูญเสียความร้อน: ครอบคลุมหลุมฐานรากด้วยโล่ไม้ปิดรถด้วยเต็นท์ผ้าใบกันน้ำ ในระหว่างกระบวนการทำให้แห้ง การให้ความร้อนเบื้องต้นจะดำเนินการอย่างช้าๆ (โดยเฉพาะอย่างยิ่งกับฉนวนที่มีความชื้นสูงสำหรับเครื่องจักรขนาดใหญ่) อุณหภูมิเฉลี่ยของการให้ความร้อนที่อนุญาตคือ 65-70C การแพร่กระจายของอุณหภูมิความร้อนของชิ้นส่วนต่างๆ ของเครื่องควรอยู่ภายใน 20C อุณหภูมิวัดโดยเทอร์โมมิเตอร์ ตัวบ่งชี้ความร้อนในตัวหรือในตัว ตลอดจนวิธีการต้านทาน
ในระหว่างกระบวนการทำให้แห้ง ทุก ๆ ชั่วโมง (หรือสองชั่วโมง) พารามิเตอร์ต่อไปนี้จะถูกวัด: อุณหภูมิที่จุดควบคุมของเครื่องและอากาศแวดล้อม ความต้านทานของฉนวนของขดลวดแต่ละอันจากตัวเรือน และฉนวนระหว่างขดลวด ค่าสัมประสิทธิ์การดูดกลืนจะถูกกำหนดในสภาวะเย็นของเครื่องที่จุดเริ่มต้นของการทำให้แห้ง หลังจากที่เครื่องได้รับความร้อนจนถึงอุณหภูมิคงที่ เมื่อสิ้นสุดการอบแห้ง (เพื่อตัดสินใจหยุดการทำงาน) และหลังจากการทำให้แห้งเมื่อเครื่องเย็นลง .
การอบแห้งจะสิ้นสุดลงหลังจากสร้างความต้านทานของฉนวนคงที่ที่อุณหภูมิคงที่เป็นเวลา 3-8 ชั่วโมง ระยะเวลารวมของเครื่องอบแห้งสำหรับขนาดเล็กและ พลังปานกลางควรมีอย่างน้อย 15-20 ชั่วโมง
มอเตอร์ไฟฟ้าที่ซ่อมแซมและทดสอบแล้วจะถูกส่งไปยังสถานที่ติดตั้งและติดตั้งตามลำดับต่อไปนี้ มีการติดตั้งมอเตอร์ไฟฟ้าบนเพลตและตำแหน่งของเพลาจะถูกปรับเพื่อให้แน่ใจว่าแกนของเพลาทั้งหมดตรงกันในช่องว่าง
การจัดแนวเพลากับแกนร่วมมักทำในสองขั้นตอน การจัดกึ่งกลางเบื้องต้นจะดำเนินการตามความเสี่ยงที่เกิดขึ้นกับขอบของส่วนต่อพ่วง ความเสี่ยงถูกนำไปใช้โดยใช้ตัวค้นหาศูนย์กลางในแต่ละครึ่งข้อต่อของเพลาที่จะเชื่อมต่อผ่าน 90 ขั้นแรก ใช้ไม้บรรทัดควบคุมกับข้อต่อครึ่งตัวทั้งสองที่จุดสี่จุดของวงกลม เลื่อนไป 90 และตรวจสอบให้แน่ใจว่ามี ไม่ กะขนานแกนเพลา หากมีการเลื่อนแกน ไม้บรรทัดควบคุมจะถูกนำไปใช้กับความเสี่ยงของการมีเพศสัมพันธ์แบบครึ่งตัวของฐาน และเมื่อหมุนเพลาตรงกลาง ความเสี่ยงอย่างหนึ่งของการมีเพศสัมพันธ์แบบครึ่งตัวจะรวมกับความเสี่ยงที่ฐาน หากความเสี่ยงทั้งสองเกิดขึ้นพร้อมกันกับขอบของไม้บรรทัดโดยไม่มีการเบี่ยงเบนเชิงมุม ไม้บรรทัดจะถูกโอนไปยังความเสี่ยงสองรายการถัดไปเป็นต้น ในกรณีที่เกิดความแตกต่างเชิงมุมของแกนของเพลา เพลาที่อยู่ตรงกลางจะเคลื่อนที่จนกว่าเครื่องหมายจะตรงกัน การจัดตำแหน่งเบื้องต้นจะถือว่าทำได้หากรอยบากทั้งสี่คู่ของคัปปลิ้งที่เชื่อมต่อตรงกัน ขายึดใช้สำหรับจัดตำแหน่งเครื่องจักรความเร็วต่ำขนาดเล็กขั้นสุดท้าย การจัดกึ่งกลางสามารถทำได้บนบูชชิ่งหรือบนขอบของคัปปลิ้ง ในการจัดแนวเพลาของเครื่องจักรความเร็วสูงขนาดใหญ่ มีการใช้อุปกรณ์ที่ซับซ้อนมากขึ้น ซึ่งการวัดแนวที่ไม่ตรงแนวจะวัดโดยตัวชี้วัดด้วยการอ่านค่าที่แม่นยำบนสเกล
การจัดตำแหน่งขั้นสุดท้ายประกอบด้วยการวัดช่องว่าง "a" และ "b" ในสี่ตำแหน่งของเพลา โดยหมุนร่วมกัน 90 ฟุต ความแตกต่างระหว่างช่องว่างทั้ง "a" และช่องว่าง "b" ในทิศทางตรงกันข้ามในแนวทแยงควรน้อยกว่าค่าความคลาดเคลื่อน
ในไดรฟ์ไฟฟ้าที่มีมอเตอร์สูงถึง 100 กิโลวัตต์ มักใช้สายพานไดรฟ์ เพลาของมอเตอร์ไฟฟ้าและกลไกการผลิตในกรณีนี้จะขนานกัน ในการจับคู่เพลาโดยการส่งกำลัง แนวนอนของแกนจะตรวจสอบโดยระดับรวมและแนวตั้งของระนาบท้ายของรอกตามระดับเฟรม จากนั้นแกนสมมาตรตามขวางของรอกทั้งสองจะถูกรวมเข้ากับแกนของตัวขับสายพาน ด้วยความกว้างของรอกเท่ากันจึงใช้ไม้บรรทัดควบคุม มันถูกวางไว้ในระนาบของแกนของเพลาทั้งสองและกดกับขอบของปลายรอกทั้งสองที่กลึงแล้ว ตรวจสอบให้แน่ใจว่าขอบรอกทั้งสองสัมผัสที่จุดทั้งสี่ หากความกว้างของรอกไม่เท่ากัน ตำแหน่งของรอกจะถูกควบคุมโดยการปรับช่องว่างทั้งสองด้านของรอกแบบแคบระหว่างขอบล้อกับไม้บรรทัดควบคุมสองตัวที่วางทับที่ปลายรอกกว้าง ความอดทนการวัดช่องว่างด้านเดียวและผลต่างของผลรวมของช่องว่างแนวขวางตามขอบรอกแคบไม่ควรเกิน 0.3 มม.
สำหรับการส่งสายพาน V อนุญาตให้เปลี่ยนแนวแกนของร่องรอกได้ไม่เกิน 16 มม. ต่อระยะห่าง 1000 มม. ระหว่างแกนเพลา
โบลต์ฐานรากถูกขันให้แน่นก่อนจะเกิดความล้มเหลวด้วยมือโดยใช้ประแจธรรมดา พวกเขาควบคุมความปลอดภัยของการจัดตำแหน่ง ทำการขันเกลียวรัดเกลียวขั้นสุดท้ายให้แน่นด้วยประแจที่ปรับเทียบแล้ว ความเพียงพอของการขันแน่นถูกควบคุมด้วยโพรบหนา 0.05 มม. ซึ่งควรเจาะเข้าไปในข้อต่อของข้อต่อเกลียวไม่เกิน 0.5 มม.
ดำเนินการทดสอบมอเตอร์ไฟฟ้า: เชื่อมต่อกับเครือข่ายเพียงไม่กี่วินาทีและเปิดซ้ำหลายครั้ง ด้วยผลลัพธ์ที่ประสบความสำเร็จของการรวม "ผลัก" มอเตอร์ไฟฟ้าจึงเริ่มทำงานเป็นเวลา 20-30 นาที ควบคุมการทำงานของการหล่อลื่น ระบบระบายความร้อน และไม่มีเสียงผิดปกติในเครื่อง วัดอุณหภูมิแบริ่งก่อนปิดเครื่อง หากไม่พบสัญญาณการทำงานผิดปกติ ให้รันมอเตอร์ขณะเดินเบาและทำการทดสอบขณะเดินเบาและอยู่ภายใต้โหลด เวลาพักถูกตั้งค่าตามข้อมูลของผู้ผลิตสำหรับมอเตอร์ไฟฟ้าตัวใหม่
ระเบียบความถี่ของการหมุนของมอเตอร์แบบอะซิงโครนัส
ความเร็วโรเตอร์ต่อนาทีถูกกำหนดโดยนิพจน์ต่อไปนี้:
n2=n1(1-s)=60f1/p(1-s).[ 1, p.147].
จากนิพจน์นี้ จะเห็นได้ว่าสามารถควบคุมความเร็วของโรเตอร์ได้โดยการเปลี่ยนปริมาณใดๆ ในสามค่าที่กำหนด นั่นคือ โดยการเปลี่ยนความถี่กระแสไฟของเครือข่าย f1 จำนวนขั้วคู่ p และสลิป s
การควบคุมความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสโดยการเปลี่ยนความถี่ของกระแสไฟหลักนั้นทำได้ยาก เนื่องจากจำเป็นต้องมีตัวแปลงความถี่หรือเครื่องกำเนิดไฟฟ้าบางประเภท ดังนั้นวิธีนี้จึงไม่ได้ใช้กันอย่างแพร่หลาย
จำนวนเสาเครื่องสามารถเปลี่ยนแปลงได้หากสเตเตอร์มีขดลวดหลายอัน (โดยปกติคือ 2 อัน) ที่มีจำนวนขั้วต่างกัน หรือขดลวดหนึ่งอันสามารถเปลี่ยนเป็นจำนวนขั้วที่แตกต่างกัน หรือขดลวดสองอันที่แต่ละอันสามารถเปลี่ยนเป็นขั้วที่แตกต่างกันได้ จำนวนเสา
หากคุณเปลี่ยนทิศทางของกระแสในขดลวดอันใดอันหนึ่ง ให้หมุนตรงข้ามกับอีกอันหนึ่ง ขดลวดสามารถเปลี่ยนเป็นสองขั้วได้ เมื่อจำนวนขั้วของขดลวดสเตเตอร์เปลี่ยนแปลง ความถี่ของการหมุนของสนามแม่เหล็กจะเปลี่ยนไป ด้วยเหตุนี้ ความถี่ของการหมุนของโรเตอร์มอเตอร์ วิธีการควบคุมความเร็วในการหมุนของมอเตอร์แบบอะซิงโครนัสนี้ประหยัด แต่ข้อเสียคือการเปลี่ยนความถี่เป็นขั้นตอน นอกจากนี้ค่าใช้จ่ายของเครื่องยนต์ดังกล่าวเพิ่มขึ้นอย่างมากเนื่องจากความซับซ้อนของขนาดของเครื่อง
การควบคุมความเร็วโดยการเปลี่ยนจำนวนขั้วที่ใช้ในมอเตอร์ที่มีโรเตอร์กรงกระรอก ในมอเตอร์ที่มีเฟสโรเตอร์ วิธีนี้ไม่ได้ใช้ เนื่องจากจำเป็นต้องเปลี่ยนจำนวนขั้วของขดลวดสเตเตอร์และจำนวนขั้วของขดลวดโรเตอร์แบบหมุนพร้อมกัน ซึ่งทำได้ยากมาก
โรงงานผลิตเครื่องยนต์ที่มีความเร็วซิงโครนัส 500-7500-1000-1500 รอบต่อนาที มอเตอร์ดังกล่าวมีขดลวดสองเส้นบนสเตเตอร์ซึ่งแต่ละอันสามารถเปลี่ยนเป็นขั้วที่แตกต่างกันได้
สลิปสามารถเปลี่ยนแปลงได้โดยการปรับรีโอสแตทที่ใส่เข้าไปในวงจรขดลวดโรเตอร์ เช่นเดียวกับการควบคุมแรงดันไฟหลัก เมื่อควบคุมแรงดันไฟหลัก แรงบิดของมอเตอร์จะเปลี่ยนตามสัดส่วนของกำลังสองของแรงดันไฟ เมื่อแรงบิดเปลี่ยนแปลง ความเร็วของโรเตอร์จะลดลง กล่าวคือ สลิปจะเพิ่มขึ้น
รีโอสแตตที่ปรับตั้งจะรวมอยู่ในวงจรขดลวดของโรเตอร์เฟสเหมือนรีโอสแตตสตาร์ท แต่ต่างจากรีโอสแตตสตาร์ทตรงที่ออกแบบมาสำหรับกระแสไฟในระยะยาว
เมื่อเปิดสวิตช์ปรับค่า กระแสในโรเตอร์จะลดลง ซึ่งจะทำให้แรงบิดของมอเตอร์ลดลง ส่งผลให้ความเร็วลดลง หรือมีการลื่นเพิ่มขึ้น ด้วยการลื่นที่เพิ่มขึ้น แรงเคลื่อนไฟฟ้าและกระแสในโรเตอร์จะเพิ่มขึ้น ความถี่ของการหมุนหรือการลื่นจะลดลงจนกว่าจะมีการคืนสมดุลของโมเมนต์ นั่นคือ จนกว่ากระแสในโรเตอร์จะใช้ค่าเริ่มต้น
วิธีการควบคุมความเร็วนี้สามารถใช้ได้เฉพาะในมอเตอร์ที่มีเฟสโรเตอร์เท่านั้น และถึงแม้จะไม่ประหยัด (เนื่องจากมีการสูญเสียพลังงานอย่างมากในลิโน่ควบคุม) จึงมีการใช้กันอย่างแพร่หลาย
1) บทนำ Art.1-2
2) อุปกรณ์ของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส st.3-6
3) หลักการทำงานของมอเตอร์แบบอะซิงโครนัส st.7-9
4) แบบแผนสำหรับการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัส st.10-13
5) การควบคุมความเร็วของการหมุนของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส st.14-15
6) ยกเครื่องบำรุงรักษามอเตอร์ไฟฟ้าแบบอะซิงโครนัส st.16-17
7) ความผิดปกติของมอเตอร์ไฟฟ้า st.18
8) ความผิดปกติของมอเตอร์ไฟฟ้าและสาเหตุที่เป็นไปได้ของการเกิดขึ้น Art.19-22
9) ประเภทและขอบเขตการซ่อม st.23-26
10) การติดตั้งมอเตอร์ไฟฟ้า st.27-29
11) ความปลอดภัย st.30-31
12) วรรณคดี Art.32